下車歩兵の「霧の散兵戦」2030年コンセプト (www.dst.defence.gov.au)
現代の戦いは各種のシグネチャを発することで敵対する部隊等に発見されることを前提にしたことを求められると思われる。そのような作戦環境において歩兵科部隊の有用性が見直されているという側面も忘れてはいけないような気がする。
先般紹介した「歩兵「攪乱部隊(Disrupt force)」の開発と作戦部隊における技術的実験 (Australian Army Occasional Paper)」は、オーストラリア国防軍が、インド太平洋の戦域で接近阻止/領域拒否の戦略を有する脅威国に対抗することを前提とした部隊の構造について2021年~2022年に実験した内容に関するものだった。
今回紹介するのは、実験の前提とする部隊の構造についての研究成果であり、「skirmishing mist(ここでの訳は霧の散兵戦)」といわれる歩兵の作戦コンセプトそのものである。コンセプトを達成するための組織はセルと云われる極めて小規模で、指揮、偵察、先駆け(pioneer)、サイバー電磁活動(CEMA)、打撃(各セル4名)に編成されている。また、作戦や戦術状況に応じて、心理作戦、防空、ヒューミント(HUMINT)、衛生能力のセルを有するようになっていることも注目できる。
陸軍の下車戦闘を主体とする歩兵が、各種の無人のシステムや電子戦やサイバー脅威に対応できる能力を有することや、分散化した作戦を前提とした場合の部隊構造に関する研究内容となっている。
各種の新興の技術の適用を念頭に置いた装備品を考えるだけでは検討が十分とは言えなく、必然的に考察する部隊の運用レベルを念頭に置きながら前提・仮説を基に仮のコンセプトを確立し、そのコンセプトに応じた組織を考えそしてシミュレーションや実動の実験を通じて検証をしていくことの必要性を再認識させられる文書である。(軍治)
![]()
 |
下車歩兵の「霧の散兵戦」2030年コンセプト
‘Skirmishing Mist’ Dismounted Infantry 2030 Concept
防衛科学・技術グループ 統合作戦分析部
Joint and Operations Analysis Division Defence Science and Technology Group
Nicholas Kempt
エグゼクティブ・サマリー
防衛科学技術(DST)グループの陸上戦力分析(LCA)将来技術コンセプト探索(FTCE)プログラムは、陸軍が新興技術を駆使し対抗するための新規かつ革新的な手法のデザイン、ならびにコンセプト的・構造的変革の潜在的な作戦的効果の評価に焦点を当てている。これらの研究成果は、研究優先順位の決定、将来の戦力の形成、思考と議論の促進、将来の用兵上の課題への対応を目的として、オーストラリア陸軍の検討事項として提言を提供するものである。
陸軍の下車戦闘プログラム(Dismounted Combat Program)と連携し、陸上戦力分析(LCA)は将来の兵士開発を支援する将来技術コンセプト探索(FTCE)研究を実施した。本研究は、兵士システム及び関連する部隊構造・能力の長期的な発展を支える2030年以降の探索的コンセプトを策定することを狙いとした。研究は次の研究課題に基づき実施された:
新技術と新興技術の組み合わせは、近接戦闘における下車歩兵の戦場での交戦能力をどのように変革するのか?
本研究では、2030年以降の近接戦闘部隊に向けた新たな初期コンセプトを創出するため、複数の分析的研究手法と創造的・参加型の共同デザイン演習を組み合わせたシステミック・デザイン・アプローチを適用した。本報告書は、このシステミック・デザイン・アプローチを用いて開発された「霧の散兵戦(skirmishing mist)」コンセプトの詳細な説明を提供する。
「霧の散兵戦(Skirmishing mist)」とは、小規模な独立チームが検知閾値以下で分散・分離・非集中化して作戦しつつ、決定的なマルチドメイン効果を発揮するという原則に基づく、トップダウン型パラダイム主導のコンセプトである。
このコンセプトの主要な原則は以下の通りである。
・ 分散して移動・戦闘し、特定の行動に集中して弱い敵を圧倒し、その後再び分散する能力
・ 命令(現地での意思決定を重視)や他のグループとの直接通信なしで長期間作戦する能力により、チームの通信と電子シグネチャが削減され、残存性が向上する。
・ 広範な警戒態勢と警戒指示の実現能力 — 強力なインテリジェンス・監視・偵察能力によるインテリジェンス主導で「目標発見(find)」と「対象特定(fix)」を実現する。
・ 物理的、社会的、情報的、電子的環境に溶け込むことで地形を「浸食」する能力
・ 欺瞞と隠蔽(あらゆる情報を否定)によって自らのシグネチャを統制・管理する能力—「ありふれた風景の中に潜む(hiding in plain sight)」
・ 敵対者と交戦するための遠隔打撃能力を保持する(「敵対者のいる場所に自ら赴かない」)
・ 検知閾値を超えた場合にのみ上昇し、高価値効果(決定的な打撃)のために(マルチドメインで)打撃する
・ 旅団機動部隊による決定的行動に有利な条件を整えるための散兵戦。
散兵戦大隊(Skirmishing Bn)は、人工知能搭載の指揮・統制(C2)システムに依存する拡充された大隊司令部の指揮下で、25のチームを擁し、各チームの効果的な指揮・統制(C2)を実現する。各チームは20名の兵士で構成され、5つの機能別セル、指揮、偵察、先駆け(pioneer)、サイバー電磁活動(CEMA)、打撃(各セル4名)に編成される。作戦や戦術状況に応じて、心理作戦、防空、ヒューミント(HUMINT)、衛生能力を提供する支援要素を加え、チーム規模や構成を調整可能である。
散兵戦部隊(skirmishing force)は強力な目標発見(find)・対象特定(fix)能力を示したが、主に分散配置で行動したため戦闘の量(combat mass)が不足し、発見された場合には瞬時に圧倒される(overmatched)危険性があった。
1. はじめに
陸上戦力分析(LCA)将来技術コンセプト探索(FTCE)プログラムは、あらゆる条件下および将来の作戦環境(FOE)における予測可能なあらゆる交戦において、戦術的優越(tactical overmatch)と戦術的支配性(tactical dominance)を発揮するために将来のオーストラリア陸軍戦闘チームが必要とする技術、能力、コンセプト、および部隊構造を探求する。本プログラムは、新興技術を活用・対抗するための新規かつ独創的な作戦の方法(ways of operating)(コンセプト探索)のデザイン、ならびにコンセプト的・構造的変革の潜在的な作戦的効果(性能)の評価に焦点を当てる。これらの研究成果は、将来の戦力を形成し、思考と議論を喚起し、将来の用兵上の課題に対処するため、陸軍の検討に向けた提言を提供する。
陸軍下車戦闘プログラム(Army Dismounted Combat Program)との協議を経て、防衛科学技術(DST)グループの陸上戦力分析(LCA)が将来兵士開発を支援する将来技術コンセプト探索(FTCE)研究を実施することで合意した。本研究では、2030年以降の探索的コンセプトを策定し、兵士システム及び関連能力の長期的な発展を支える。この研究が重要なのは、陸軍が「センシング技術、精密攻撃、意思決定の進歩が将来の紛争における交戦の様相を根本的に変える[1]」将来に備える必要があるためである。
1.1高度な交戦戦域
将来技術コンセプト探索(FTCE)研究は、以下の研究課題に基づき将来の高度な関与コンセプトを探求することを狙いとした。
・ 新興技術と既存技術の組み合わせは、近接戦闘における下車歩兵の戦場の交戦能力をどのように変革するのか?
ここでは、
・ 技術とは、2030年までに実現可能と評価される能力を指す
・ 戦場での交戦は、目標発見(find)、対象特定(fix)、打撃(strike)、追撃(exploit)という下位戦術機能によって枠組みが定められる[2]
・ 歩兵は軽歩兵[3]であり、戦闘チーム・レベルにおける無人支援システムを含む。
この研究は、近接戦闘が持続的なものであり「二つの実動の部隊の衝突」を伴うと仮定した。すなわち、近接戦闘には依然として人間の相互作用が必要であり、ロボット戦争は実現していない。
1.2方法論
本研究は研究課題に答えるため、システミック・デザイン・アプローチ[4]を採用した。このアプローチは、2030年以降の近接戦闘部隊に向けた新たな初期コンセプトを創出するため、複数の分析的研究手法と創造的・参加型の共同デザイン演習を組み合わせたものである。
システミック・デザイン手法は、アナリストを以下のプロセスに導く。
・ 将来予測シナリオ
・ コンセプト/インスピレーション・カード
・ 歴史的類似事例
・ 発散的ブレインストーミング
・ イノベーション・アンビション・マトリクス
・ 理想化デザイン
・ 風洞実験
・ コンセプト・スケッチ
・ 現状から目標への転換
・ 最もリスクの高い仮定の特定
本研究で生成された選択肢は、新規性、妥当性、変革性を備えたものである。これらは、将来下車戦闘チームのコンセプト的な目標設定(aiming points)に活用される前に、さらなるフィードバック、分析、精緻化を必要とする。
防衛科学・技術グループ(DST)グループ・エディンバラにて、歩兵に関する深い知識を持つ陸軍参加者(上級下士官および将校)ならびに防衛科学・技術グループ(DST)グループの技術専門家および作戦分析スタッフを対象に、4日間のシステミック・デザイン・ワークショップが開催された(2019年9月)。4日間にわたり、参加者はシステミック・デザイン・プロセスを指導され、将来シナリオや2030年以降の技術領域に没入[5]。1920~30年代におけるコンセプトの分岐的進化とその影響を理解した[6]。その後、陸軍と防衛科学・技術グループ(DST)グループの参加者を混合した2つのシンジケートに分かれ、将来コンセプトのデザイン・開発を行った。ワークショップでは2つの詳細なコンセプトが生成された。最終日には、将来シナリオに対するコンセプトの有効性評価とリスク特定評価を実施し、ワークショップを締めくくった。
本報告書は、「霧の散兵戦(skirmishing mist)」コンセプト、そのサブ・コンセプト、およびシステミック・デザイン・ワークショップで生成された支援部隊構成を詳述する。報告書は、当該コンセプトの性能評価をもって締めくくる。
前述の通り、将来シナリオは、将来志向のデザインが満たすべき文脈と課題を把握することを可能にし、次にデザインの性能を評価するための試験環境を提供する。本研究で使用したシナリオと関連する事例は表1にまとめた。過去の実験や歴史的会戦(historical battles)から導出された一連の事例は、異なる戦術状況と地形、遭遇する脅威部隊、遂行すべき任務の種類(攻撃または防御のオーバーレイ)を表す4つのシナリオ・テーマによって分類されている。

表1 シナリオ空間 |
2. 「霧の散兵戦」コンセプト
デザインプロセスの文脈化および技術没入段階を経て、シンジケートは研究課題である「将来の戦場における交戦能力」に対して、革新的かつ変革的なコンセプトをデザインするという課題について考察した。
シンジケートは議論と考察の過程を経て、検知閾値以下での作戦と闘いのアイデアを潜在的な変革的ビジョンとして受け入れた。このアイデアは、小規模で分散し緩やかに連携するチームとして作戦するプロフェッショナルなゲリラ・スタイルの陸軍作戦の概念によって形作られた。
システミック・デザイン・プロセスを通じて、この初期のアイデアは「霧の散兵戦(Skirmishing mist)」という名称のもとで成熟した。この名称は、陸軍部隊が地形に分散して包囲し、行動のために集中し、そして蒸発するように消え去る能力を表している。これはT・E・ローレンス(T.E. Lawrence)の言葉を想起させる。彼はこう述べた[7]。
「もし我々が(もしかしたらそうなのかもしれないが)影響力、理念、無形で、無敵で、前も後ろもなく、ガスのように漂う存在だとしたらどうだろう?軍隊は植物のようで、動かず、しっかりと根を張り、長い茎を通して頭まで栄養を与えられる。我々は蒸気のように、望むところに吹き出すかもしれない。我々の王国は各人の心の中にある。生きるために物質的なものを何も求めないように、殺戮にも物質的なものは何も提供できないだろう。普通の兵士はターゲットがなければ無力かもしれない。自分が座っているものだけを所有し、命令に従ってライフルを突きつけられるものだけを征服するのだ。」
このコンセプトのために開発された基盤となる作戦パラダイム[8]は以下の通りである。
・ 機動要素部隊による決定的な行動に有利な条件を整えるための散兵戦(skirmish)
-このコンセプトは、すべてに対する唯一の壮大な解決策ではないが、旅団(Bde)統合任務部隊(JTF)の能力の重要な要素である。
・ 分離され、分散化され、分散化された状態で作戦する、
-他のグループが壊滅しても生き残れる小規模モジュール型チームで作戦する能力。
-分散して移動・戦闘を行う能力(見えない水滴)、特定の作戦(雲の形成)のために集中して弱体化した敵を圧倒し、再び分散する能力(蒸発するため)。
-命令なし(現地での意思決定)または他部隊との直接通信なしで長期間作戦する能力。これによりチームの通信と電子シグネチャを低減し、残存性を向上させる。
・ 検出閾値以下で動作する(ステルス性を重視する)
-広範な警戒態勢と警戒指示の実現能力 – 強力なインテリジェンス・監視・偵察能力によるインテリジェンス主導型で目標発見(find)・対象特定(fix)する。
-物理的、社会的、情報的、電子的環境に溶け込むことで地形を「浸食」する能力(包み込む霧)。
-欺瞞と隠蔽(あらゆる情報の否定)を駆使してシグネチャを統制・管理する能力-「ありふれた風景の中に潜む(hiding in plain sight)」
-敵対者と交戦するための遠隔打撃能力(現場に居合わせる必要はない)。
・ 地形を占領せず、敵対者を破壊し、混乱させ、劣化し、拒否し、欺け
-検知閾値を超えた場合にのみ打撃(マルチドメイン)を行い、高価値効果(決定的な強打)を達成する
・ 隣接チームとの連携および後方支援体制の構築による協調的/同期的な効果(編隊飛行)を実現する能力
・ 迅速な効果発現による時間制約のある攻撃の実現
-組織を結束させている連結点と中枢を体系的にターゲティングする(組織を分断する)
-「情報・キネティック機動(info-kinetic manoeuvre)」を重点とし、あらゆるドメインと地域において敵対者を攻撃する(縦深の打撃)
-敵の精神を混乱させ、弱体化させ、消耗させるために、攻撃や嫌がらせに耐え続ける
・ 大規模な戦闘を避ける – 決定的な戦闘に巻き込まれないようにする。
このアイデアを表すコンセプト的な比喩として潜水艦戦が用いられる。すなわち、広範な指揮下で限定的な統制のもと、単独潜水艦行動(チーム)と複数潜水艦による集団攻撃(協調/同期した「ウルフパック」チーム)の可能性である。潜水艦戦術とは「分散、奇襲、敵が脆弱で無防備な地点への打撃、広大な海洋への消失、そして敵の士気の継続的な侵食と資源の分散」である。このコンセプトは、例えば米海軍の分散型致死性による海上統制コンセプト[9]、MITRE社の小部隊作戦(SUO)コンセプト[10]、米国防高等研究局(DARPA)のモザイク戦[11]にも通じる。
2.1ハイレベルのコンセプト
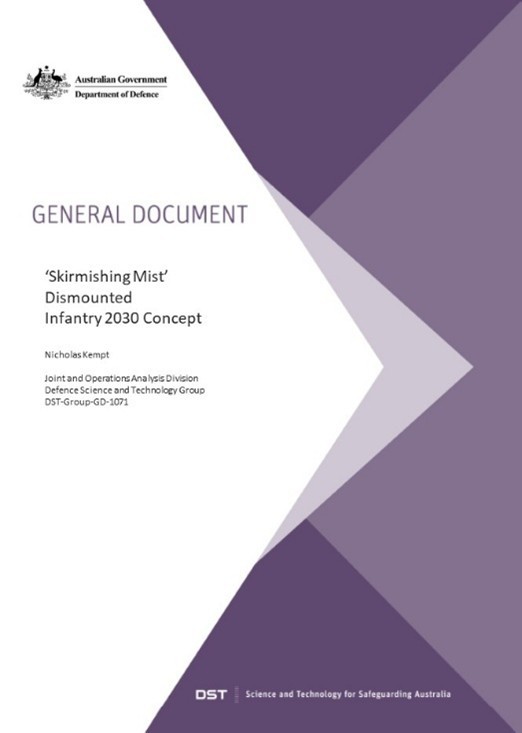
図1はデザイン・パラダイムに基づく包括的なコンセプトを示している。小型の低シグネチャ・チームが、支援地域、近接地域、縦深地域にわたる戦域全体で持続的な戦力を提供する。各チームには作戦地域(AO)が割り当てられ、広範な指針と指揮のもとで敵対者を破壊、妨害、弱体化、排除、欺瞞することを目指す。決定権限と主導性はチーム・リーダーが保持する。
作戦地域(AO)への進入は、航空機移動、水陸両用、河川作戦の支援能力及び陸上浸透により達成される。この進入様式と作戦パラダイムには、ステルス性、軽量性、機動性、簡素性を備えた能力が求められる。チームを支援するのは、上位指揮・通信要素、持続的かつ時宜を得た地域効果及び精密効果を提供する各種打撃火力支援、並びに兵站・衛生支援である。
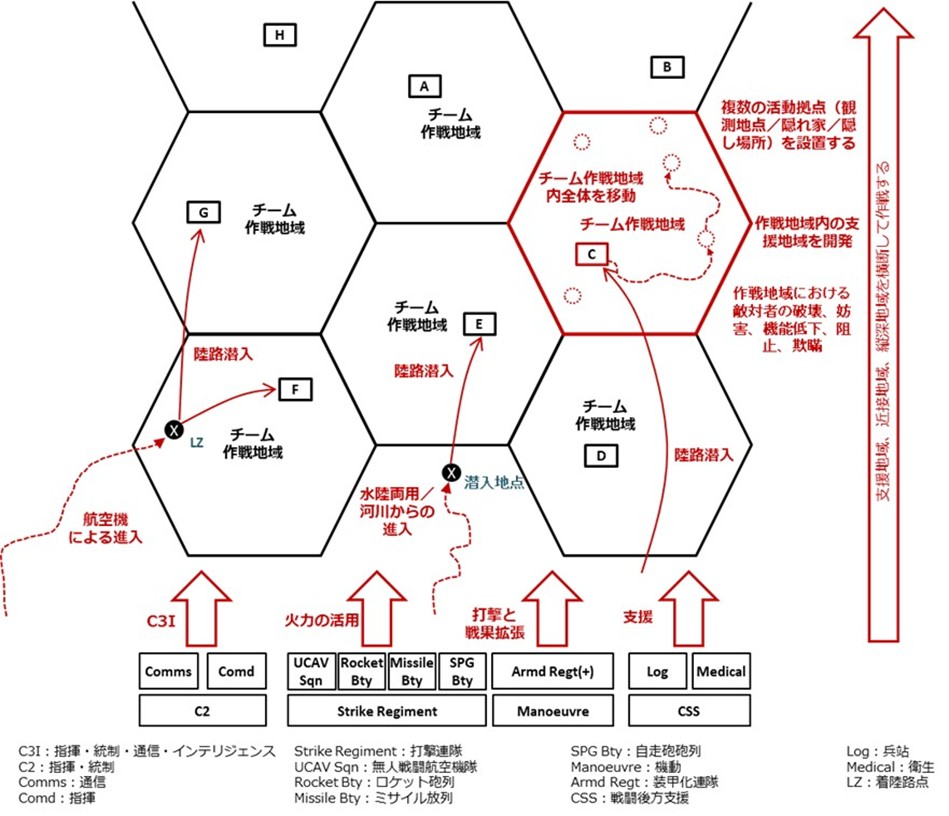
図1. 「散兵戦の行動(skirmishing actions)」の高レベルのコンセプト・フレームワーク |
重搭乗機動要素部隊(heavy mounted manoeuvre element)は、「散兵戦の行動(skirmishing actions)」によって生み出された状況と機会を最大限に活用し、決定的な打撃を与える態勢を整えている(図2)。この機動部隊は地形を掌握・支配する能力を有しており、これは散兵戦部隊(skirmishing force)のコンセプトには存在しない能力である。
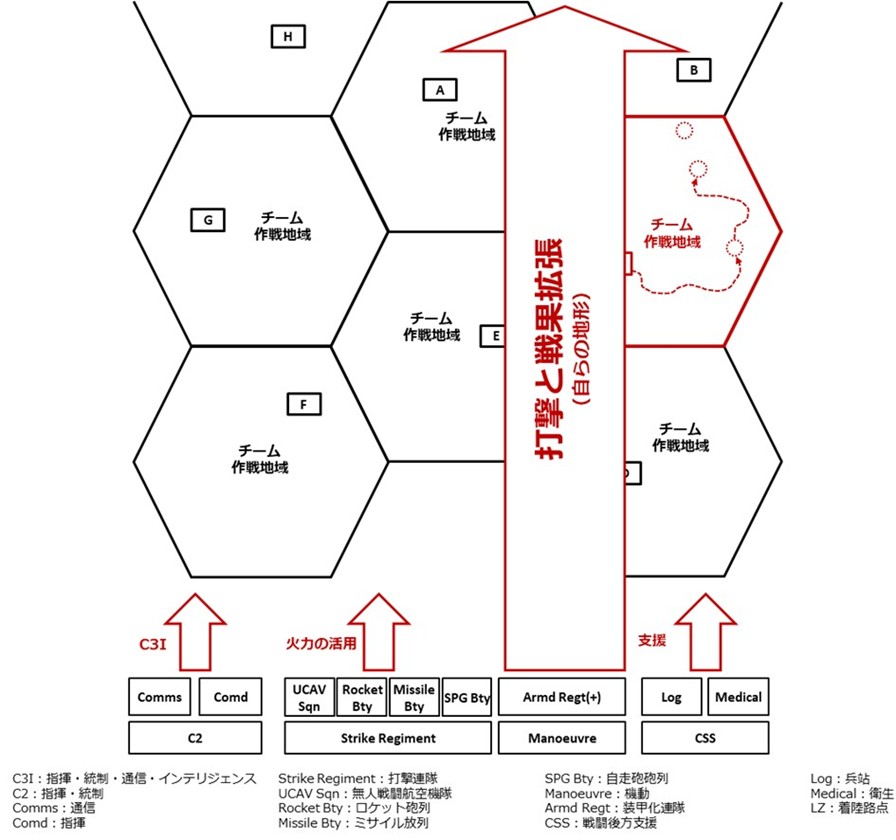
図2 「霧の散兵戦(Skirmishing mist)」におけるに乗車機動 |
以下の節では、このコンセプトがどのように実現されるかを説明する。
2.2打撃のサブ・コンセプト
このコンセプトの一環として、5つの攻撃モードが開発された(図3)。
・ モードA – 主な作戦モード。チームがターゲットを検知・捕捉した後、滞空型無人戦闘航空機(UCAV)および/または弾薬による追撃のために「タグ付け」を行う。タグは、例えばナノクラス無人航空機(UAV)、スマート・ダスト、化学マーカーなどを用いて設置される電子タグ[12]、あるいは上位司令部に伝達され符号化される生体認証プロファイルである場合がある。ターゲットを破壊するタグ付けに加え、チームはターゲットを保存するためのタグ付けも可能である。これは打撃対象外とし、重要な地点・アセット・人物を示す。遠隔打撃は、タグ付けされたターゲットや、兵器射撃管制システム内の「AIジャッジ」による交戦許可を得て、所定の敵対プロファイル/シグネチャに合致する機会ターゲットに対しても、スマート地雷や遠隔ロボット兵器ステーションを用いて実施される。
図3 「霧の散兵戦(Skirmishing mist)」の打撃のサブ・コンセプト |
・ モードBでは、チームが打撃連隊(Regt)(偵察・打撃JTACモード)を用いて、確認済みターゲットへの火力支援を要請し、遠隔打撃を実行する。このモードでは、火力支援要請や調整のための通信により、チームのシグネチャ(検知可能性)を高める必要がある。
・ モードCでは、状況が有利な条件下で打撃の機会を提供する場合、チームは有機的なチームの兵器システムを用いて現地での直接行動を実施する。このモードは、決定的な効果をもたらすために遠隔射撃による支援が可能である。
・ モードDは、有機的なチーム兵器システム(「ウルフパック(wolfpack)」ビジョン)を用いたチームによる協調的な局所打撃を伴う。打撃の調整メカニズムについては第2.3節で論じた。ターゲットは、チームの協調的使用を正当化するほどの重要な価値と規模を有していなければならない。このモードは、決定的な効果をもたらすために遠隔射撃によって支援され得る。
・ モードEは、滞空型無人攻撃機(UCAV)およびミサイル・システムが自律的に偵察・打撃任務を遂行する能力を表す。このモードは、自律型協調UCAV/兵器の技術コンセプトを包含する。友軍誤認を回避するため、敵友軍識別能力が必須である。
各チームは、拡張可能な致死性、非致死性、情報、およびサイバー効果を実行する能力を有している。
2.3通信のサブ・コンセプト
検知閾値を下回った状態を維持しつつ、チーム内・チーム間および上位司令部との効果的な通信を実現することは重大な課題であった。シンジケートは最小限のシグネチャを維持するため、多様な通信手段を採用した。
・ 潜水艦作戦の理念に従い、上位司令部がチームと連絡を取る主な手段は、暗号化された通信を用いた一方向のブロードキャスト・メッセージ・システムである。帯域幅とセキュリティ上の制約を考慮すると、この通信形態は短い指令メッセージに限定される。
・ チーム間および上位司令部との高情報密度伝送には、無人航空機(UAV)便法を用いる。大量のデータを無人航空機(UAV)にアップロードし、発送可能である。受取側は無人航空機(UAV)を回収しデータ・アップロードを実施する。小型無人航空機(UAV)は時速200kmを超える移動能力を有するため、情報交換の遅延は短時間(数時間)に抑えられるが、非常に高い帯域幅を提供する。この作戦モードを拡張する手段として、2機の無人航空機(UAV)便が予め指定されたデータ交換ポイントで合流し、短距離空中データ転送を実施する能力が存在する。
・ チーム間の通信は、作戦区域境界上の指定調整地点における隣接チームとの対面会話、または光学通信(設置されている場合)による直接視界通信もしくは無人航空機(UAV)中継器を介して実現できる。光学通信[13]は、チームの各セルが広範囲に分散している場合、チーム内通信手段としても使用可能である。
・ 可能な場合、チームはステガノグラフィ※の使用や目立たないキャリア・プロトコル内[14]など、いわゆる「ありふれた風景の中に潜む(hiding in plain sight)」手法により、民間の通信・伝送システムを活用できる。
※ ステガノグラフィ(steganography、隠写術)の軍事における意味は、秘密のメッセージの存在自体を第三者から隠蔽し、秘匿通信を可能にする技術
・ 部隊要素内および部隊要素間の最終的な通信手段は、電波周波数(RF)チャネルを用いた低探知率/低傍受率(LPD/LPI)通信である。ただし、これはチームの脆弱性を低減するための例外的な使用が検討される。
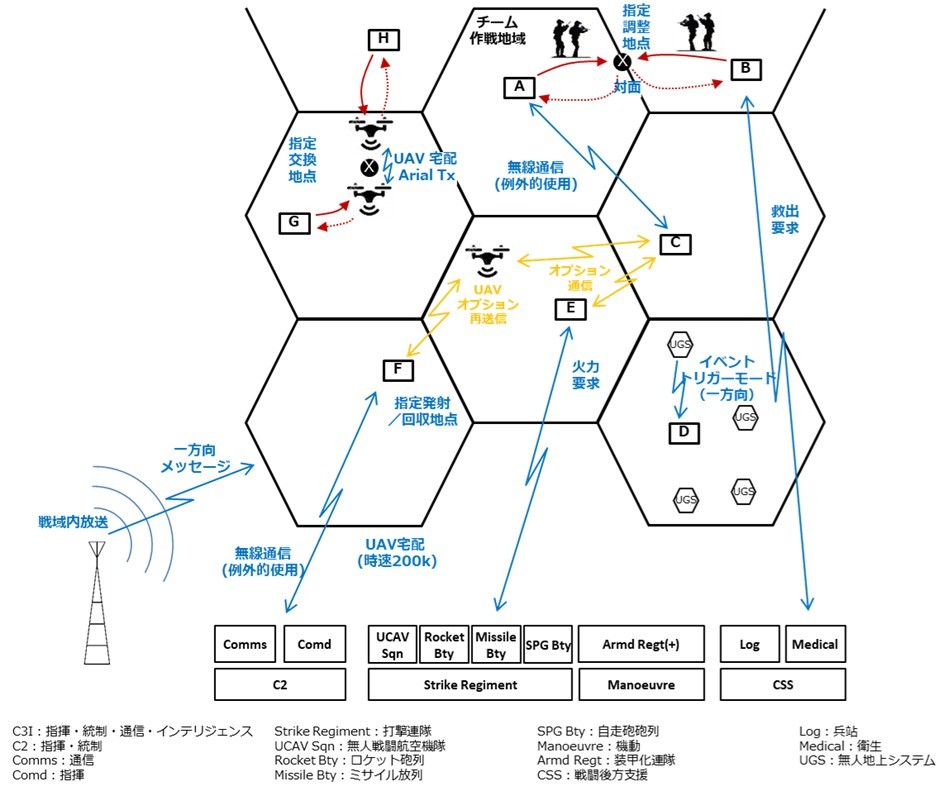
図4 「霧の散兵戦(Skirmishing mist)」における通信サブ・コンセプト |
2.4センシングのサブ・コンセプト
このコンセプトは、戦闘空間に関するデータと情報を取得するためにパッシブ遠隔センシング技術の利用を強く基盤としている。パッシブ・センシングには電子戦(EW)、音響、地震、磁気、化学、および電気光学/赤外線(EO/IR)が含まれるが、電気光学/赤外線(EO/IR)能力は反射検出の影響を受けやすい。無人地上センサー(UGS)フィールド、電子戦(EW)、パッシブ・レーダー、音響アレイの広範な使用が、脅威探知の主要手段と位置付けられ、地上・空中(無人航空機(UAV))両方の電気光学/赤外線(EO/IR)によって補完される。無人地上センサー(UGS)フィールドは無人航空機(UAV)で展開可能であり、無人地上車両(UGV)への搭載も検討され、戦術状況に対応可能な流動的な無人地上センサー(UGS)フィールドを実現する。検知リスクが低いと判断される状況では、地上監視レーダーやレーザー測量/ターゲット探知を含むアクティブな探知が適用される。
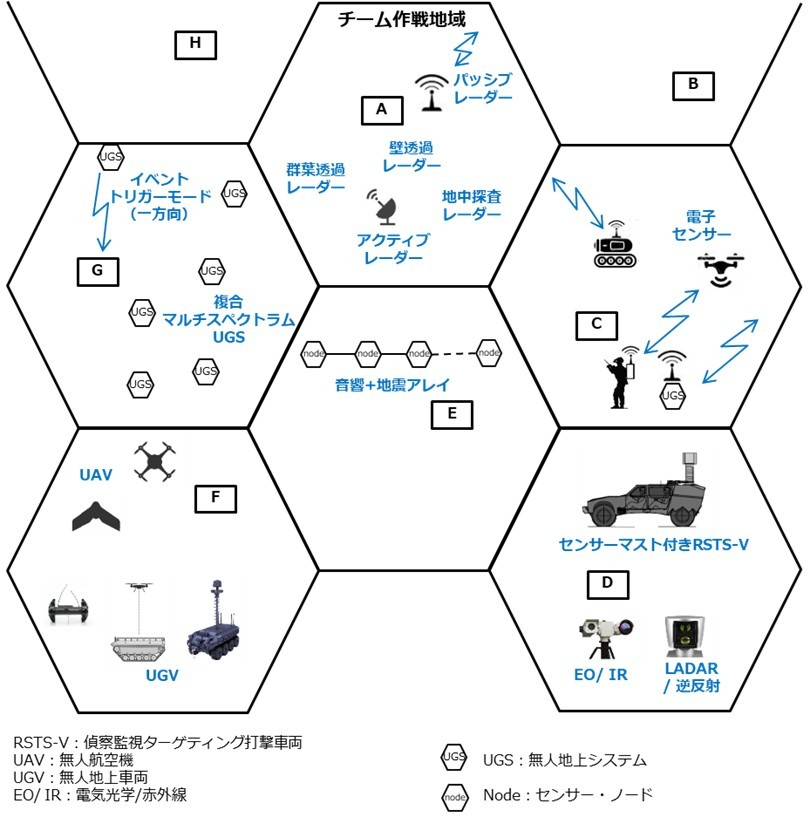
図5 「霧の散兵戦(Skirmishing mist)」のセンシング・サブ・コンセプト |
2.5拒否と欺瞞のサブ・コンセプト
このコンセプトにおいて、検知閾値以下で効果的に作戦し、戦術的奇襲を達成し、残存する能力が最も重要である。このコンセプトは、以下の手段を通じてパッシブとポジティブに妨害と欺瞞を実施する能力を包含する[15]。
・ 隠蔽
・ 模倣
・ シミュレーション
・ デモンストレーション
・ 偽情報
高度な広域マルチセンサー/プラットフォーム収集システム、上空画像、持続的収集手段に対抗する否認・欺瞞技術;知能化されマルチセンサー対応のスマート弾薬;ならびにデータ処理、融合、活用能力。
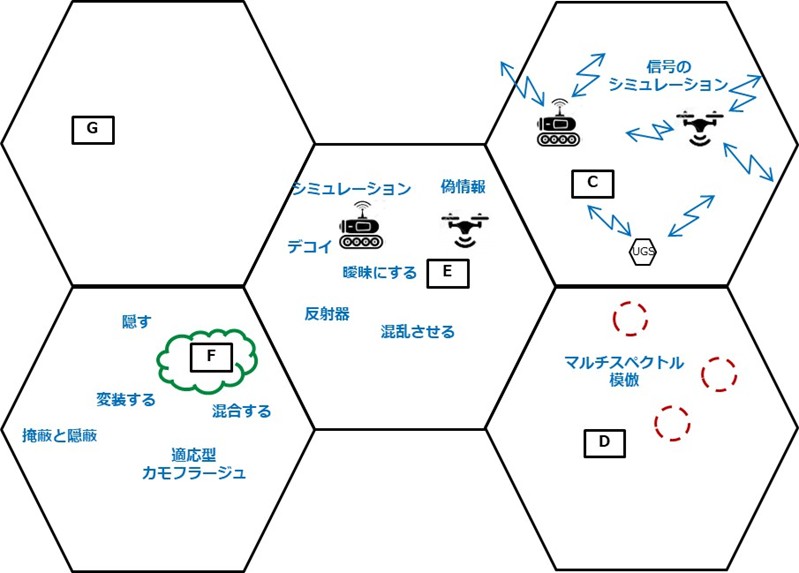
図6 「霧の散兵戦(Skirmishing mist)」における拒否と欺瞞のサブ・コンセプト |
あらゆる潜在的な探知手段(音響、地震、化学的(臭気)、光学、熱、無線周波数、情報、サイバーを含む)における否認と欺瞞。電子戦、音響、その他のシグネチャを用いて背景ノイズレベルを上昇させ、隠蔽を支援する無人航空機(UAV)および無人地上車両(UGV)の活用には大きな可能性がある。
2.6後方支援のサブ・コンセプト
このコンセプトの成功には「厳格(austere)」という言葉が極めて重要であり、各チームは検知閾値以下での作戦遂行を支援する外部補給に依存しないデザインとなっている。これは、外部からの補給に依存せず、自給自足を実現する技術によって達成される。具体的には、水素燃料セル車両による発電(副産物として輸出可能な電力と水を供給)、空気から水を生成するシステム、限定的な積層造形技術、量・質量による火力よりも精度を重視した高致死性スマート兵器、および指向性エネルギー兵器などの電気兵器が挙げられる。
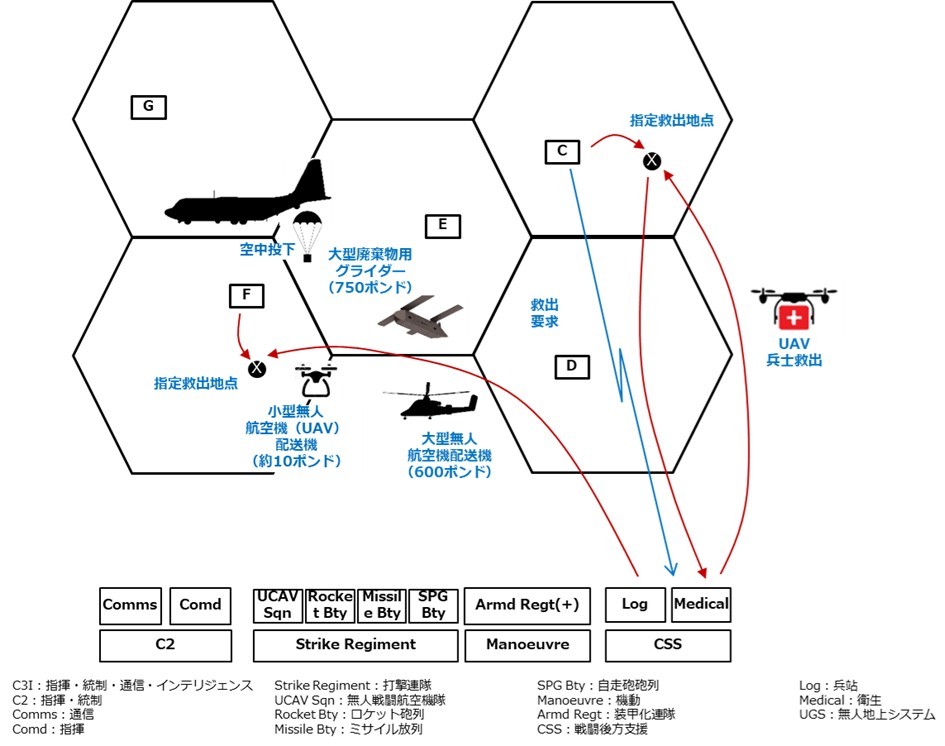
図7 「霧の散兵戦(Skirmishing mist)」の後方支援サブ・コンセプト |
補給が必要な場合、貨物の質量、体積、緊急性、および輸送距離に応じて、様々な航空輸送システムが検討対象となった。検討対象となった実用的なシステムには、小型・高速・軽量の無人航空機(UAV)便(例:Amazon配送サービス)、大型ヘリコプター搭載型無人航空機(UAV)(例:カマン K-MAX)、大型使い捨てグライダー(例:兵站用グライダー LG-1K)、固定翼航空機による空中投下(例:C27/C130)が含まれる。地上補給は、潜在的な補給任務に伴うシグネチャの残存リスクと敵占領地域への潜入要件を考慮し、実現可能性が低いと判断された。
負傷兵の救出・収容は、待機状態の無人航空機(UAV)衛生システムにより実施され、負傷兵は外傷ケアシステム(例:リュックサック型外傷ケアシステム、TRACIR)内に収容されることで、兵士の残存確率[16]が向上する。
3. 「霧の散兵戦(Skirmishing mist)」の部隊の構造
3.1部隊編成の構造
ワークショップでは、「霧の散兵戦(skirmishing mist)」要素の開発に重点が置かれ、「歩兵コンセプト」の旅団レベル全体への影響を探る時間は限られていた。したがって、旅団レベルの構造(図8)は不完全ではあるが、展開時にチームを支援するために必要な基本要素は含まれている。
ワークショップの主な焦点は、散兵戦大隊(Skirmish Bn)要素の開発であった。この大隊は、AI対応C2システムに依存する拡充された大隊司令部の指揮下で、25のチームを擁し、各チームの効果的な指揮・統制(C2)を実現する。各チームは20名の兵士で構成され、5つの機能別セル、指揮、偵察、先駆け(pioneer)(または戦闘工兵)、サイバー電磁活動(CEMA)、打撃(各セル4名)に分かれる。作戦や戦術状況に応じて、心理作戦(PSYOPS)、防空、ヒューミント(HUMINT)、衛生能力を提供する支援要素でチーム構造を拡張可能である。各セルの構成と能力については、3.2節および3.3節で詳述する。
打撃連隊は複数のシステムを組み合わせることで持続的な戦場効果を発揮する。図9は無人戦闘航空機隊(UCAV Sqn)と「飛行兵器庫」プラットフォームを示しており、これは偵察・打撃能力を提供すると同時に、地上火力能力(ロケット、ミサイル、自走砲(SPG)部隊)によって補完される(図10)。ティルトローター式無人戦闘航空機(UCAV)の作戦は敵対者の防空能力に大きく影響を受けるが、このリスクは持続的な長距離陸上火力要素によって相殺される。
装甲化連隊要素部隊は、伝統的な機動戦を展開し、決定的な「衝撃と畏怖」の陸上効果を生み出す能力を有し、「地形を支配する」能力を備える。高度な指揮・統制(C2)能力の発展を踏まえ、指揮範囲の拡大が実現可能と判断された。連隊は戦車、装甲歩兵、戦闘工兵、支援部隊からなる恒常的な多機能組織である。必要に応じて散兵戦大隊(skirmishing Bn)の能力を活用する。
支援大隊(Support Bn)は、軽車両を含む散兵戦大隊(Skirmish Bn)の全要素を遠距離かつ高速で揚陸・展開可能な垂直揚力能力を提供し、兵站・衛生支援を実施するとともに、通信能力を供給する。
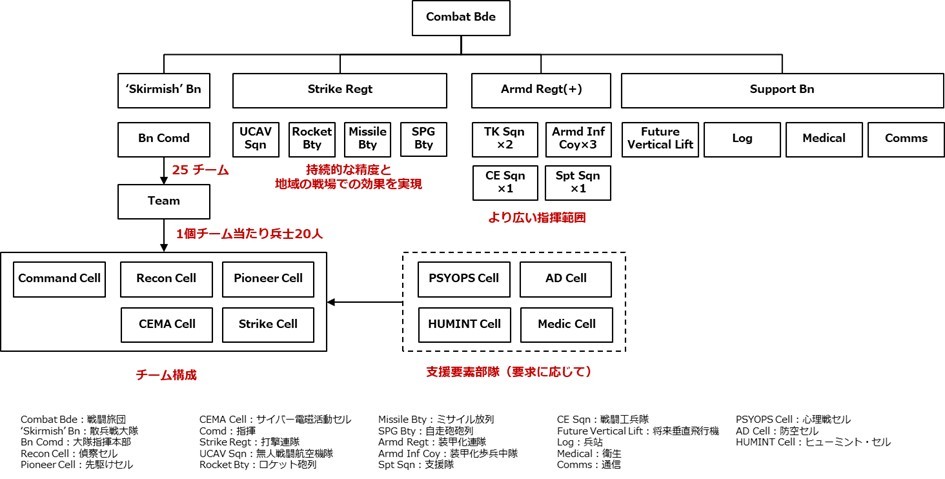
図8 「霧の散兵戦(Skirmishing mist)」の部隊編成の構造 |
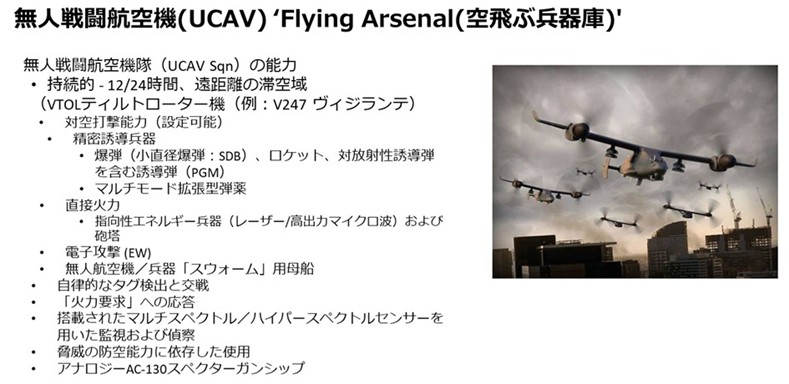
図9 「霧の散兵戦(Skirmishing mist)」の無人戦闘航空機隊(UCAV Sqn)の能力 |
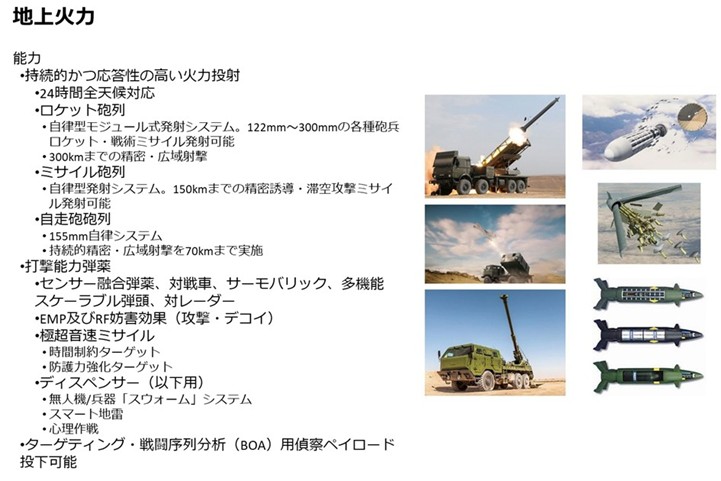
図10 「霧の散兵戦(Skirmishing mist)」のロケット、ミサイル、自走砲部隊の能力 |
3.2チームの構造とセルの構造
3.2.1チームの構造
20名編成のチームは、散兵戦大隊(Skirmish Bn)の部隊構成における基本編成である。基本編成では、各セルは指揮、偵察、先駆け(pioneer)、サイバー電磁活動(CEMA)、打撃の5つの機能セルにそれぞれ4名の要員を配置する。基本構成は、各セルの人員数の変動や支援要素の追加を通じて、シナリオ・任務・脅威への適応能力を有する。例えば基本20名チームは(図11参照)、12名で能力を縮小した軽装備版を生成可能であり、あるいは心理戦(PSYOPS)やヒューミント(HUMINT)要素を組み込むことで安定化作戦向けチームへ調整できる。
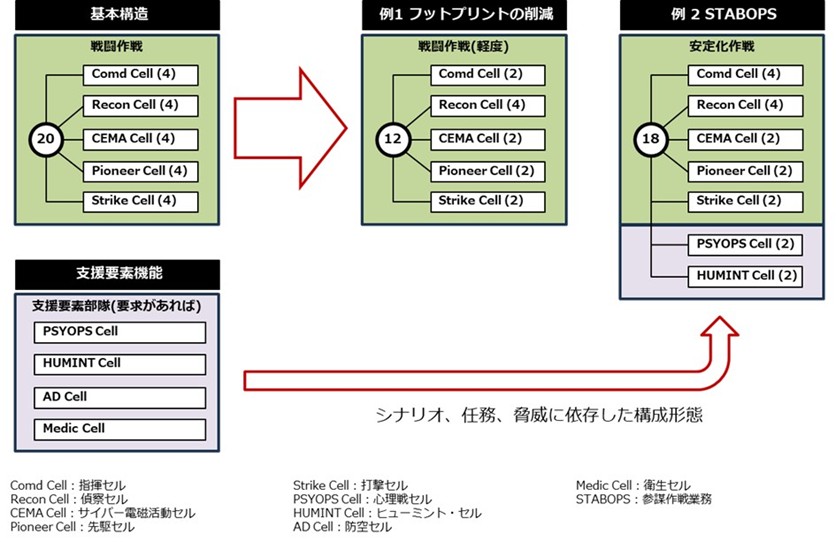
図11 「霧の散兵戦(Skirmishing mist)」のチーム構成 |
3.2.2一般的なセル構造
上述のように、汎用セル構造には4名の要員と複数の移動手段オプションが含まれる(図12)。これらの移動手段オプションは、兵士の移動・機動能力を強化し、個人兵士の能力を超える装備の運搬・作戦を可能とする一連の能力を提供する。
兵士
このコンセプトの兵士は、オーストラリア陸軍の「兵士の戦闘システム 将来の兵士ビジョン2040[17]」を基にデザインされた。将来の兵士は、外骨格、先進的なマルチスペクトラム迷彩、兵士監視を含む統合情報システム、荷重運搬システムなどの技術を備える(図13)。
将来の兵士は技術的な目標設定(aim point)を示す一方で、特定のシナリオや状況においては、将来の兵士コンセプトのシグネチャ・プロファイルは作戦環境に効果的に溶け込む能力を提供せず、独特で明確なシグネチャを生成する。この状況では、独自のシグネチャを提示することなく最良の効果を得るために、選択されたサブ・システムが採用される。
機敏な個人移動
小型で機敏な電動駆動全地形適応車両(ATV)は、あらゆるリフト手段で容易に輸送可能であり、制約された環境下でも運用可能なため、兵士の作戦能力を拡張する潜在的な手段と考えられた。図示のモデルはEZRaider HD4電動スクーターで、1回の充電で約80kmの航続距離、最高速度50km/h、重量わずか130kgを実現。兵士1名と75kgの装備を輸送可能。専用バッテリー搭載の電動トレーラーを連結すれば、追加で250kgの貨物または担架ラックを運搬でき、スクーターとの連結時には航続距離を倍増させられる。

EZRaider HD4 https://www.ezraider.com/products/ezraider-hd4/ |
偵察監視ターゲティング打撃車両(RSTS-V)
このセルの主要な輸送・作戦手段は、4名の兵士を収容可能な四輪駆動(4×4)車両である。完全電動駆動車両に有機マストと再構成可能な貨物エリアを備える。図示のモデルは、2000年代初頭に開発された長距離ステルス偵察車両GD RST-Vシャドウ車両を基にしている(図14)。本車両は状況に応じて車高とシグネチャを調整可能な完全アクティブ・サスペンションを採用。CH47およびV22機体内への輸送を前提にデザインされた。2030年型近代化モデルでは先進的なシグネチャ管理技術[18]を導入し、水素燃料セルによる無音・検知不能な推進力を供給。これにより車輪内蔵電動モーター[19]を駆動する。水素燃料セルの副産物である水と、外部供給可能な電力も得られる。
センサー、通信、その他の高所作業を提供する昇降マスト。軽火器を装備した遠隔兵器ステーションが車両を完成させる。

偵察監視ターゲティング打撃車両(RSTS-V) https://www.army-technology.com/projects/shadow/ |
多目的中型無人地上車両
多目的中型無人地上車両(UGV)は、危険な活動において統制下および半自律/完全自律モードの両方で多様なサービスを提供するチームにとって不可欠な支援手段と見なされた。中型無人地上車両(UGV)は、役割や任務に応じて代替および/または複数のペイロードを搭載する能力を有する。図15に示す実例はHDTプロテクターシステムであり、各種アドオンを用いた潜在的な構成例を示している。長距離移動時には、無人地上車両(UGV)は偵察監視ターゲティング打撃車両(RSTS-V)によって牽引される。
まとめ
生成可能な最小かつ最軽量のセルは、4名の兵士が独立して行動する形態である。ただしこの能力は、兵士の耐久力と携行重量によって制限される。兵士を支援システムで補強することで能力と戦力を向上させられるが、その代償としてシステム支援要件とセルのシグネチャ/プロファイルが増大する。4名の兵士は、遂行すべき任務と役割に応じて、移動システムの全部または一部で補強が可能である。
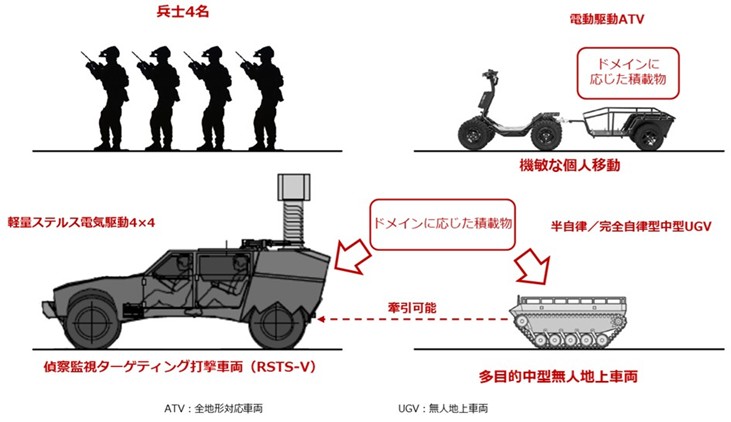
図12 「霧の散兵戦(Skirmishing mist)」の汎用セル構造 |
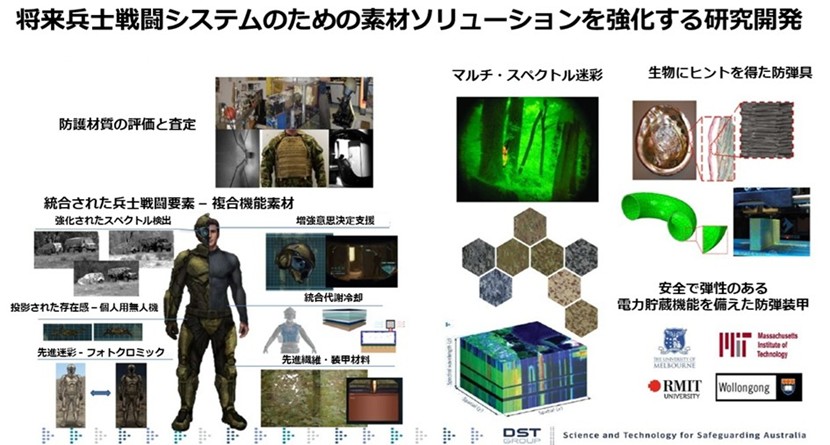
図13 兵士戦闘システム 将来の兵士向け技術例 |
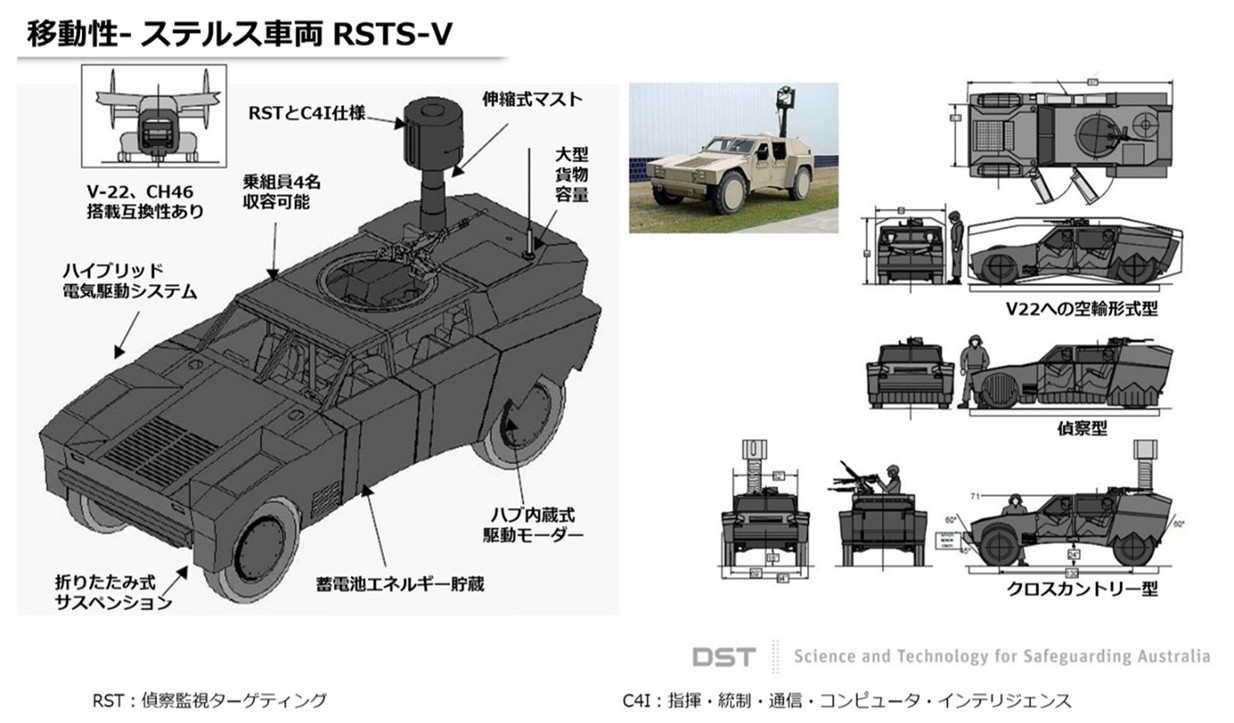
図14 「霧の散兵戦(Skirmishing mist)」の偵察監視ターゲティング打撃車両(RSTS-V)(画像提供:GD US) |

図15 「霧の散兵戦(Skirmishing mist)」の多目的中型無人地上車両(UGV)の例(画像提供:HDT Global) |
3.3セルの能力
以下の節では、本コンセプトの一環として開発された各セルの基礎について説明する。これらの説明は、セルが実行可能な機能、使用可能な技術、および基本構造について簡潔にまとめたものである。記載されている技術は、セルがどのような効果を生み出す可能性があるかについての洞察を提供するが、セルの能力を決定づけるものではない。あくまでも参考としてご活用ください。兵士4人乗りの下車班として運用する場合、無人地上車両(UGV)システムによる支援を受ける場合、そして四輪駆動(4×4)偵察監視ターゲティング打撃車両(RSTS-V)を使用する場合のセルの能力を精緻化するには、さらなる作業が必要である。
3.3.1指揮セル
指揮セルは展開チームの本部および指揮・統制(C2)能力を提供する。その機能、代表的な技術、および構成は図16に示す通りである。
| 指揮セル | |
| 機能
・ チームの指揮・統制を実行 ・ 戦闘空間のセンスメイキング ・ 偵察・監視情報の収集の計画策手と管理 ・ 広域の通信の管理 ・ 変単の管理の実行 - 物資調達は兵站計画の重要な要素 ・ 全ての兵器の火力要求を管理 |
利用可能な技術
・ Al対応の指揮支援システム ・ 光通信 ・ UAV便 – 通信のぺイロード ・ ナノUAV/UGV 電子タグ 要員構成 ・ 指揮官 ・ 副指揮官 (オプション) ・ インテリジェンス分析 ・ 信号手 |
|
図16 「霧の散兵戦(Skirmishing mist)」の指揮セル |
想定される技術の例として、AI搭載の指揮支援システムが挙げられる。これは個々の兵士、セル、チームに対し、友軍部隊・アセットの追跡、敵のターゲット・マーカーの特定、チャットデータ・映像・生体モニタリングを提供する。この能力は直接射撃と間接射撃を併用した協調攻撃を可能にし、分散型作戦においてセンサーから射手へのターゲット引継ぎを実行すると同時に、効果の最適化を実現する——「あらゆるセンサー/最適な射手」というコンセプトである。この指揮支援システムの核心要素は「AIジャッジ」であり、交戦規則の適用や戦争の法的側面について指揮官を導く役割を担う。
指揮・統制(C2)システムは、任務開始時にデータをアップロードされ、作戦中はセルによって維持管理され、主要な情報交換には無人航空機(UAV)便が使用される。
敵対者および中立者の現地状況認識を構築する「情報分析官」の役割は、チーム行動の効果に基づく計画立案をインテリジェンスに基づいて可能にする。
3.3.2 偵察セル
全てのセルはセンサーとして機能し、戦闘空間情報を生成する必要があるが、偵察セルは戦闘空間の偵察と監視を遂行するための専門的な能力を提供する。その機能、代表的な技術、および構成は図17に示す通りである。
| 偵察セル | |
| 機能
・ 環境内の関連要素の属性と能力に関するマルチドメイン・マルチスペクトル情報収集を実施 ・ パッシブな偵察・監視を実施 ・ 選択条件下でのアクティブな偵察・監視を実施 ・ 交戦対象のターゲットのタグ付け |
利用可能な技術
・ マルチスペクトルUGS ・ レーザー反射/LADAR/センサーキル ・ 音響検知ネットワーク ・ EO/IR広視野ゴゴン・ステア ・ UAV/UGV 情報収集用有線接続型 ・ 地上監視レーダー ・ 生体認証 要員構成 ・ 偵察リーダー ・ センサー・マネージャー ・ 斥候 |
|
図17 「霧の散兵戦(Skirmishing mist)」の偵察セル |
ワークショップでは、セルが使用可能な様々な偵察システムの候補が特定された。重点は、作戦地域全体に展開される無人地上センサー(UGS)、地震ネットワーク、音響ネットワークといったパッシブな技術の活用に置かれた。代表的な技術例として、McQ RANGER 無人地上センサー(UGS)(図18)が挙げられる。これはコンパクトな形態でマルチモード検知を実現し、30日間の稼働期間を有する。

図18 McQ RANGER 無人地上センサー(UGS) |
別の技術例としては、ターゲティング・データ提供、ターゲット探知、通信、敵の光学センサーの機能低下、照明能力、戦場の3Dイメージング、敵の視覚の一時的な無力化といった機能を備えた多目的レーザー装置が挙げられる。
アクティブ探知方式が採用可能な場合、これによりセルは軽量地上監視レーダー装置(例:樹冠透過レーダー(図19))を活用できる。これらの装置は携帯型および車両搭載型の形態で利用可能である。
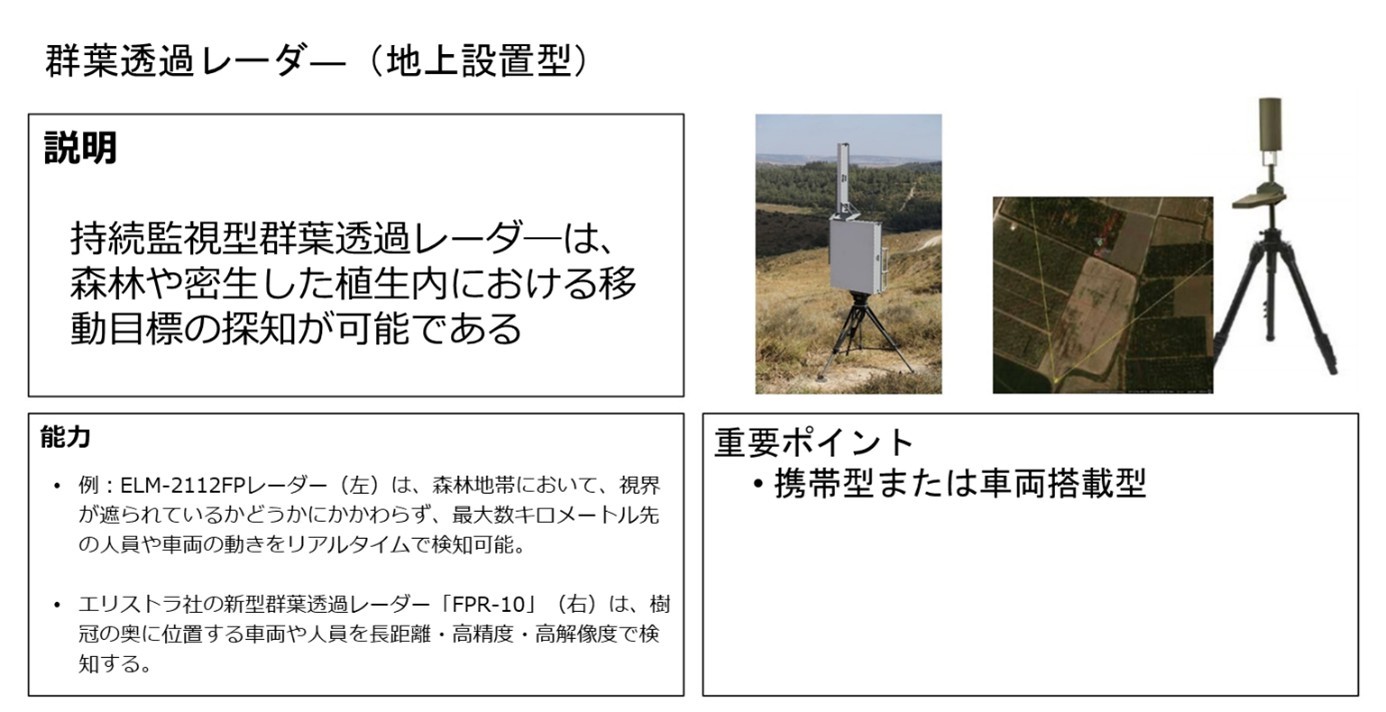
図19 群葉透過レーダーの例 |
3.3.3サイバー電磁活動(CEMA)セル
サイバー電磁活動(CEMA)セル(図20)は、無線周波数スペクトラム及びサイバー情報ドメインにおいて、統合的な偵察、打撃、欺瞞活動を遂行する能力を有する。
| サイバー電磁活動(CEMA)セル | |
| 機能
・ 環境内の関連要素の属性と能力に関するRF及びサイバー情報を収集する ・ 電子戦戦闘序列(ORBAT) ・ 敵対者の要素組織に対するEA、EA-Cyber及びサイバー攻撃を実施する - 対UAV/UGV、IED及び通信対策 - PNT妨害 ・ 電子欺瞞を実施する部隊防護のための電波放出統制及び信管スプーフィングを実施する |
利用可能な技術
・ 電子支援(ES)/電子攻撃(EA) ・ サイバー・インテリジェンス(CYBINT) ・ パッシブ・レーダー ・ 電子欺瞞装置 要員構成 ・ CEMAのリーダー ・ 電子戦(EW) ・ サイバー |
|
図20 「霧の散兵戦(Skirmishing mist)」のサイバー電磁活動(CEMA)セル |
2030年代には、現在の能力の代表例である多目的電波観測・指向装置(VROD)/ VROD モジュラー適応型送信機(VMAX)[20]を大幅に上回る性能が期待される。これらは電磁スペクトラムを感知・対抗・活用し、支配する可能性を秘め、マスキング、プロービング、スプーフィング、インテリジェンス収集、電子攻撃を提供できる。
このセルの特筆すべき点は、通常サイバー電磁活動(CEMA)には関連しないパッシブ・レーダー能力を備えていることである。これは、このセルがチームの電磁(EM)応用及び活用能力を維持しているためである。
3.3.4先駆けセル(pioneer cell)
先駆けセル(pioneer cell)は、小規模チームに適した幅広い戦闘工兵任務(図21)を遂行できる。セルが実行可能な行動の数と種類は、装備の機動性要件によって大きく制約されるが、これは偵察監視ターゲティング打撃車両(RSTS-V)および/または無人地上車両(UGV)の使用によって相殺可能である。シナリオと任務に応じて、装備を個別に選択する必要がある。
| 先駆けセル(pioneer cell) | |
| 機能
・ スマート地雷原の構築 ・ 陣地と障害物の設置 ・ 障害物・地雷原・防御施設・仕掛け爆弾の処理 ・ 爆破工作 ・ 即席爆発装置 ・ 物理的欺瞞要素 ・ 地理空間インテリジェンス(GEOINT) |
利用可能な技術
・ スマート地雷原 ・ 爆破工作 ・ 地雷探知機 ・ CBRN検知 ・ ナノUAV/UGV電子タグ 要員構成 ・ 先駆セルのリーダー ・ 先駆要員/戦闘工兵 |
|
図21 「霧の散兵戦(Skirmishing mist)」の先駆けセル(pioneer cell) |
既存技術のスマート地雷技術の一例として、スコーピオン地雷(図22)が挙げられる。これはセンサー融合技術を用いて対人員・対装甲戦闘車両効果器を提供し、協調攻撃の可能性を有する。この技術ソリューションを無人地上車両(UGV)フレーム基盤と組み合わせることで、侵入に調整・対応する自己修復型地雷原のコンセプト(図23)を開発することが可能となる。
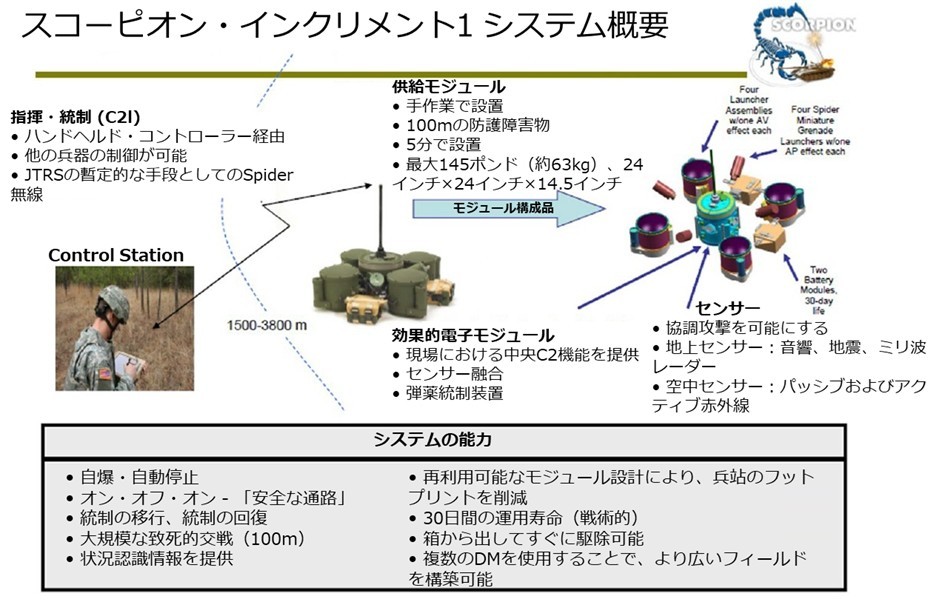
図22 スコーピオン・スマート地雷 |

図23 自己修復型スマート地雷原 |
3.3.5打撃セル
打撃セルの目的は、局所的なターゲットを攻撃する機会が生じた際に、他のチームと連携して局所的な致死性効果を発揮することである。また、このセルはチームの主要な自衛反応能力を担う。
| 打撃セル | |
| 機能
・ 直接射撃及び地域間接射撃によるターゲットの交戦 要員構成 ・ 打撃のリーダー ・ 多技能の兵士 |
利用可能な技術
・ 極超音速ライフル ・ ネットワーク接続型センサー打撃無人航空機/無人地上車両/ミサイル・システム ・ ロボット歩哨(ポープ) - 軽機関銃/重機関銃/自動擲弾発射機 ・ 指向性エネルギー兵器 レーザー/電磁パルス/高出力マイクロ波兵器 ・ 精密誘導ミサイル - 小型ミサイル (Drone40, Switchblade) - 中型ミサイル (Javelin, HERO) - 極超音速対戦車誘導兵器 ・ レーザー誘導ロケット ・ 対放射線弾薬 ・ ナノUAV/UGV電子タグ |
|
図24 「霧の散兵戦(Skirmishing mist)」の打撃セル |
図24の技術装備リストは、採用可能な幅広い能力を示している。2030年代には、ネットワーク化されたセンサー・打撃ミサイル・システム(マイクロ・スウォーム)が中核能力となり、精密攻撃ミサイルやロケットによって補完されると予測される。シンジケートはワークショップにおいて「ポープ」と呼ばれる地上配備型同等システムを考案した。これは相互接続された複数のロボット哨戒軽兵器(ポップアップ式スプリンクラーのように動作)で構成され、「AIジャッジ」の支援により脅威を検知・追跡・ターゲット化・自律的に交戦する能力を有する。
「人間がループを開始する(human-starts-the-loop)」というパラダイムのもとで運用され、人間のオペレーターが基本的な交戦規則を設定した後、自律的に行動を遂行する。ポープは攻撃的用途にも使用され、スマート地雷原に相当する設定により、ターゲット化されたターゲットや機会ターゲットを追跡・攻撃する。「高硬度」ターゲットを撃破し重大な効果を得るため、マッハ6.5の小型キネティック・エネルギー・ミサイル(CKEM)および超高速対戦車ミサイル(HATM)技術実証機[21]を基にした極超音速対戦車誘導兵器(ATGW)が用意される(図25)。大型兵器のため四輪駆動(4×4)偵察監視ターゲティング打撃車両(RSTS-V)プラットフォームの使用が必要となる。

図25 小型キネティック・エネルギー・ミサイル(CKEM)と超高速対戦車ミサイル(HATM) |
3.3.6支援セル
4つの支援セル能力が特定された。これらは、様々な作戦や任務において、チームの選定された要素を増強または代替するものである。図26から図29は、セル能力に関する基本情報を提供する。これらのセルの機能、能力、構造について成熟した記述を開発するには、さらなる作業が必要である。
| 心理作戦(PSYOPS)セル | |
| 機能
・ 対抗するグループの意見、感情、態度、振舞いに影響を与える作戦 - ホワイト・プロパガンダ(省略と強調) - グレー・プロパガンダ(省略、強調、人種的・民族的・宗教的バイアス) - ブラック・プロパガンダ(改ざんの委託) |
利用可能な技術
・ 大きな音を発する能力 - 音響投射 – レーザー/ 長距離音響発生装置(LRAD) ・ ポータブル(持ち運び可能)なラジオ放送システム(RIAB) ・ パンフレットやチラシの製造施設 ・ サイバー電磁活動を通じた誤った情報 要員構成 ・ 心理作戦(PSYOPS)要員 |
|
図26 「霧の散兵戦(Skirmishing mist)」の心理作戦(PSYOPS)セル |
| ヒューミント(HUMINT)セル | |
| 機能
・ 脅威の属性、意図、構成、戦力、配置、戦術を特定するためのヒューミント(HUMINT)作戦 ・ ヒューミント(HUMINT)源の聴取と尋問 ・ インテリジェンス事項及び資料の通訳者または翻訳者 ・ 外国語によるホスト国機関との連絡調整 |
利用可能な技術
・ 言語翻訳技術 ・ 生体情報の取得 ・ 収集・処理システムと連携したデジタル・レコーダー ・ インテリジェンス分析セット 要員構成 ・ ミューミント(HUMINT)要員 |
|
図27 「霧の散兵戦(Skirmishing mist)」のヒューミント(HUMINT)セル |
| 防空(AD)セル | |
| 機能
・ 航空脅威に対する防御 ・ サイバー電磁活動(CEMA)と連携し、航空システムを電子的に撃破する ・ レーザー兵器と連携し、航空システム(センサーおよび構造体そのもの)を撃破する |
利用可能な技術
・ 携帯式防空ミサイル・システム(MANPADS) 要員構成 ・ 防空(AD)要員 |
|
図28 「霧の散兵戦(Skirmishing mist)」の防空(AD)セル |
| 衛生セル | |
| 機能
・ 衛生サービスの提供 |
利用可能な技術
・ 「ゴールデン・アワー」延長技術 ・ 「スマート・スタビライザー」 ・ 戦勝者回復システム ・ 遠隔医療リンク(利用可能な場合) 要員構成 ・ 衛生要員 |
|
図29 「霧の散兵戦(Skirmishing mist)」の衛生セル |
4. パフォーマンス探求
4.1 「from–to」のパラダイム・シフト
システミック・デザイン・プロセスでは、デザイン者は開発したコンセプトを検証し、既存のコンセプトと比較したパラダイム・シフトを明確に説明する必要がある。シンジケートは、コンセプトに表れた変革を既存のコンセプトと能力に対して自己評価した(表2)。特定された最も重要な変革は次の3点である。
・ ステルス性を保ち、検知閾値以下で作戦する
・ 指揮・統制(C2)構造の平坦化
・ 戦闘空間への影響力と火力支援能力の強化
|
表 2 「霧の散兵戦(Skirmishing mist)」の「from–to」のパラダイム・シフト |
|
| シフト前の状態「from…」 | シフト後の状態「…to」 |
| * 伝統的な指揮・統制(C2)構造 | フラットな指揮・統制(C2) (旅団→大隊→チーム) |
| 中隊レベルでのモジュール化 | チーム・レベルのモジュール化(指揮の効果レベルを低階層へ) |
| オン・コールの近接航空支援(CAS) | 飛行装甲とスマート地雷・兵器システムを用いた遠隔交戦を悪用する有機的火力 |
| 統合火力末端統制官(JTAC)を通じた射撃→統合火力効果調整センター(JFECC) | 旅団打撃連隊へ直接 |
| 火力の運搬は種類・量に制限あり | チーム・レベルでの複数の効果へのアクセス |
| *観測可能であること | ステルス/閾値以下になる |
| アクティブな通信信号 | パッシブ受信および低シグネチャ通信 |
| 防御のための戦闘量 | 分散型チーム |
| 規範的機動 | 移動の自由 |
| 高コスト(人員、装備品) | 低コスト(特定の視点や基準(WRT)から何か(from)を述べる) |
| *限定的な戦闘影響/射撃 | 戦闘影響力/射撃の改善 |
| より高いリスク | 残存性の向上によるリスク低減 |
| 旅団レベルでの低い状況認識(SA) | 旅団レベルでの強化された状況認識(SA)と分散された状況認識(SA) |
| 集権型/非効率な兵站(プル型) | 調達、オン・デマンド、または現地印刷 |
| 標準軍事モデル(グローバル) | 独自に編成された部隊(ニッチな能力) |
| 階層的/集権型モデル | 分散型/分権型(強化された復元性/適応性) |
* このコンセプトに存在する上位3つのパラダイム・シフトを示す
4.2コンセプトに関する特定されたリスク/課題
このコンセプトに関する主な課題またはリスクは以下の通りである。
・ 高度な感知能力を有し、現地住民と隣接して作戦し交流する状況下でも、検知閾値を下回る能力。20名のチームは、検知閾値を下回った状態で作戦可能な最大規模とみなされた。陸軍の専門家は、12名に縮小したチームが、検知可能性と軍事的有用性/性能の最適なバランスであると判断した。
・ 低い有機的な戦闘の量(combat mass)と、発見された場合に急速に圧倒される(overmatched)可能性が高い。
・ 通信エミッションを低く抑えたいという意向や代替手段の遅延問題により、連携した行動をまとめたり生み出したりすることがより困難である。
・ ほぼ完全自律運転モードで運用するには、高い適応力と自信を持ち、状況を把握できるリーダーが必要である。
4.3 シナリオ別性能評価クラス – 風洞試験とウォーゲーミング
このコンセプトの性能を探求し、その長所と短所を検証するため、都市戦場マラウィシナリオにおいてコンセプトの卓上戦術シミュレーションを実施した。このシナリオは、フィリピン南部におけるマラウィの戦いを再現したもので、反乱勢力が都市を占領・要塞化し、多数の民間人を人質として拘束していた状況を想定した。ウォーゲームシナリオでは、反乱勢力は国家支援型ハイブリッド部隊と分類され、外国の専門顧問を擁し、高性能技術兵器(例:ATGW/MANPADS)の投入が行われた。
ウォーゲーム手法では、「行動、反応、反撃」のサイクルを用いた双方向の議論と自己判定が行われた。コンセプト的部隊(青部隊)が主導性を握り行動を提示すると、敵対者がそれに応答し、最終的に青部隊の反撃策が議論された。
ウォーゲームの見どころ。
・ コンセプト的戦力(青部隊)の卓越した目標発見(find)・対象特定(fix)能力により、反乱勢力は地下作戦に追い込まれ、建物間の鼠穴を含むあらゆる形態の頭上遮蔽物を活用せざるを得なくなった。
・ この文脈において、電子戦(EW)能力はパッシブ・レーダーおよび壁貫通レーダー能力によって支えられた重要な強みと見なされていた。
・ 逆反射検知は重要な対狙撃技術であった。
・ 生体認証データの収集と分析は、ターゲットの特定と遠隔打撃における生体認証データの潜在的な利用を可能にする必須能力とみなされた。
・ 青部隊ロボット哨戒兵とスマート地雷原システムの使用により、赤部隊の移動を阻害する拒否・支配区域の構築が実現した。敵対者の要素の生体認証ターゲティング技術を活用することで、ターゲットとの交戦が向上した。
・ 持続的な飛行兵器庫が統制区域の維持と時間的制約のあるターゲットへの攻撃を支援した。
・ コンセプト部隊は工業用化学ガスによる待ち伏せ攻撃を受け、ガス形態の検知不能や負傷者管理の困難さなど、コンセプトに重大な問題が生じた。
・ 赤部隊によるトンネル内移動と人質利用は青部隊にとって重大な課題となった。青部隊はトンネル内でのUxS偵察に頼り、音響兵器と催涙ガスを用いてトンネル内の占拠者を制圧した。トンネル崩落は敵対者の地下移動を統制するために利用された。
・ 赤部隊による建物崩壊の兵器化は、青部隊のコンセプトでは十分に阻止できなかった。
・ 敵対者の無人地上車両(UGV)および無人航空機(UAV)の使用を統制する上で、電子戦攻撃とサイバー攻撃の活用が重要であった。これにより敵の状況認識を妨害し、あるいは誤ったターゲットを生成して戦闘空間に対する敵の認識を操作した。
4.4評価基準による判断
当該コンセプトは、ジャングル戦場ボルネオ・シナリオおよび地下戦場トロント・シナリオにおいて要求される能力と効果を達成する能力について、定量的目標フレームワーク[22]に基づき自己評価された(表3)。1(能力なし)から5(完全な能力)までの5段階リッカート尺度を用いた。
|
表3 「霧の散兵戦(Skirmishing mist)」のコンセプト性能評価 |
||
| ビネット | ||
| 目標 | ボルネオ
(Borneo) |
トロント
(Toronto) |
| 地表および地表より上の都市環境における課題に対応する | 3 or4 | 3 |
| 都市環境における内部および地下の課題に対応する | 4 | 3 |
| 非都市環境における課題に対応する(例:ジャングル、山岳、砂漠、河川沿いなど) | 4 | no entry |
| 電磁(EM)環境を含むサイバー・ドメインにおける課題への課題に対応する | 5 | 5 |
| インテリジェンス図と状況理解の変化に対応する | 2 | 5 |
| 復元性があり粘り強い近接戦闘能力を運用する | 5 | 4 |
| 適応性が高く柔軟な近接戦闘能力を運用する | 5 | 5 |
| 作戦環境において信頼性の高い後方支援を実行する | 3 | 3 |
| 戦闘で敵対者を凌駕する | 4 | 2 |
| 交戦を通じて行動の自由を維持する | 5 | 2 |
| 防勢的優位性を維持し、攻勢的優位性を獲得する | 4 | 4 |
| 近接戦闘で圧縮したキル・チェーンを適用する | 4 | 4 |
| リアルタイムの作戦環境の効果を特定する | 5 | 4 |
| 決定的な戦術効果を達成する | 4 | 3 |
| 身体的、認知的、社会的、文化的復元性を発揮することで敵対者を凌駕する | 5 | 4 |
| 用兵上の優位性を生み出すために必要なすべての効果を同期させる | 4 | 3 |
| 戦闘で敵対者を出し抜く | 5 | 3 |
| 戦闘において、リーダーシップ、柔軟性、適応力を実証する | 5 | 5 |
| 必要に応じて「条件」指揮と分散型意思決定を採用する | 5 | 5 |
| 戦闘における潜在的な摩擦の要因を特定し、活用する | 3 | 3 |
| 作戦環境における制約を緩和する | 4 | 4 |
| 情報ネットワークの性能、信頼性、およびセキュリティを統制する | 5 | 5 |
ボルネオのジャングル戦場を想定した評価では、本コンセプトは多くの目標において高い性能を発揮すると判断された。ジャングル環境は、小規模チームが自然地形を駆使して残存性を高め、短時間の機動的な交戦を実現する絶好の機会を提供した。唯一、変化する環境への対応能力が重大な欠点とされた。この弱点は、制約された通信モデルが情報交換の即時性に影響を及ぼす可能性から生じた。持続的な近接戦闘遂行能力は、この状況下では弱点とは見なされなかった。
トロント(Toronto)の地下空間という現代都市の地下戦場環境においては、コンセプト性能はボルネオ環境よりもわずかに劣ると評価された。固定された地下ネットワークが全ての移動を既知の経路に限定し、計画の選択肢を制限したため、行動の自由度を維持することは極めて困難であった。地下区間間の地下通路による移動も検討されたが、小規模チームが保有しない適切な装備なしでは極めて困難と判定された。
通信制約もまた、環境内での行動の同期化能力を制限した。特定された制約の多くは、このコンセプトに特有のものではなく、いかなる部隊による地下戦闘の結果として生じるものである。
5. 結論
システミック・デザイン手法を採用し、2030年以降の下車歩兵コンセプトを開発した。これにより、将来の戦闘形態を根本的に変えるであろう、感知能力・精密攻撃・意思決定の進歩に備え、陸軍の対応力を強化する。本研究の成果は、下車戦闘プログラム(Dismounted Combat Program)及び関連能力の長期的な発展に資するものである。
本報告書で説明する「霧の散兵戦(skirmishing mist)」のコンセプトは、小規模な独立チームが検知閾値以下で分散・分離・非集中化して行動し、戦域全域で遠隔打撃や直接行動を実行可能とする原則に基づく、トップダウン型パラダイム主導のコンセプトである。
小規模チームの連携行動は、敵の戦意を動揺させ、弱体化させ、消耗させる決定的なマルチドメイン効果をもたらす。主要な戦闘を回避し、決定的な交戦に陥らないことが基本方針である。散兵戦の行動(skirmishing actions)は、部隊の主力装甲戦闘部隊による決定的行動に有利な条件を整える。
低シグネチャ・パラダイムでは、小規模チームが長期間にわたり命令なし(現地での意思決定を重視)で作戦し、他のグループとの直接的な通信も行わないことが求められる。一方向戦域放送は、無人航空機電子便送システムによって支援される上級指揮部通信の主要な手段であった。あらゆるセンサー帯域にわたる欺瞞と隠蔽は、小規模チームにとって不可欠な能力を形成する。遠隔打撃サブ・コンセプトが開発され、小規模チームがターゲット(電子的または生体認証)をタグ付けし、飛行兵器庫無人航空機(UAV)、スマート地雷、遠隔監視砲塔による追撃を可能とする。低シグネチャ維持は、物資調達、現地製造、無人航空機(UAV)による支援供給によって達成される。
各チームは、検知閾値を超え、単独またはチームと連携して高価値効果(決定的な打撃)を打撃する。これは長距離の点・面効果のための打撃のリーチバックによって実現される。
散兵戦大隊(Skirmishing Bn)は、AI搭載指揮・統制(C2)システムに依存する拡充された大隊司令部の指揮下で25のチームを擁し、各チームの効果的な指揮・統制(C2)を実現する。各チームは20名の兵士で構成され、5つの機能別セル、指揮、偵察、先駆け(pioneer)、サイバー電磁活動(CEMA)(指揮・統制・通信・電子戦)、打撃(各セル4名)に分かれる。チーム構造は、作戦や戦術状況に応じて、規模の調整や、心理作戦(PSYOPS)、対人戦術(AD)、ヒューミント(HUMINT)、衛生能力を提供する支援要素の追加が可能である。
コンセプトの自己評価と机上ウォーゲーミングの結果。
・ 複数の事例において、復元性があり、粘り強く、適応力と柔軟性を発揮した。
・ オーストラリアの兵士および将校の強力な認知能力、指導力、柔軟性、適応力を頼りにし、活用した。
・ 電子戦感知能力、パッシブ・レーダー、反射率検知、生体情報収集・分析を含む、優れた有機的な目標発見(find)・対象特定(fix)能力を有していた。
・ 持続飛行兵器庫、ロボット哨戒システム、スマート地雷原システムは、拒否・支配区域の構築と時間制約のあるターゲットへの攻撃を支援した。
・ 高度な感知能力を備え、地域住民と隣接して作戦し交流するため、検知閾値を下回った状態での作戦継続を可能とする。
・ 低い有機的な戦闘の量(combat mass)が低く、検知されると瞬時に圧倒される(overmatched)危険性があった。
・ 通信エミッションを低く抑えたいという意向と代替手段の遅延問題により、連携した行動をまとめたり生み出したりすることが困難であった。
おそらく最も示唆に富むのは、このコンセプトが技術導入と漸進主義では不十分であることを認識し、将来の作戦環境に対応するための深い適応とパラダイム・シフトを特徴としている点である。
ノート
[1] https://smallwarsjournal.com/jrnl/art/advanced-engagement-battlespace-tactical-operational-and-strategic-implications-future
[2] Land Operations, Land Warfare Development Centre, UK Army Doctrine Publication AC 71940, 2017
[3] 今後の研究では、搭乗歩兵の戦闘ドメインを探求する
[4] この手法は以前、2050年のオーストラリア陸軍を研究するために用いられた。共同研究論文シリーズ第3号『デザイン思考:オーストラリア国防軍への応用:「2050年オーストラリア陸軍のための戦力システミック・デザイン」』ブランドン・ピンコム他著。https://www.defence.gov.au/defence-activities/research-innovation/research-publications/design-thinking-applications-australian-defence-force
[5] 合計108の新興技術とコンセプトが発表された
[6] 第一次世界大戦後の分析に対する対応として、戦間期におけるフランスとドイツの異なるコンセプト形成に関する考察。
[7] 「知恵の七つの柱(Seven Pillars of Wisdom)」トマス・エドワード・ローレンス (Thomas Edward Lawrence)著ワーズワース・エディションズ・リミテッド刊1935年 と 1997年 https://gutenberg.net.au/ebooks01/0100111h.html
[8] 著者らは、これらの考え方の基礎の一部について、また言語の使用法については、デイヴィッド・キルカレン(David Kilcullen)が2018年RUSI陸軍会議で行った発表を参考にしていることを認める。
[9] https://www.public.navy.mil/surfor/Documents/Surface_Forces_Strategy.pdf
[10] https://apps.dtic.mil/dtic/tr/fulltext/u2/a350176.pdf
[11] https://www.darpa.mil/work-with-us/darpa-tiles-together-a-vision-of-mosiac-warfare
[12] 「タグ付け・追跡・位置特定」(TTL)技術の概要は、https://www.wired.com/2009/06/inside-the-militarys-secret-terror-tagging-tech/ に記載されている。
[13] 例えば、米海軍大学院がQRコードを用いたデジタル信号機を研究している。(https://calhoun.nps.edu/handle/10945/34727?show=full)
[14] https://www.blackhat.com/docs/eu-15/materials/eu-15-Bureau-Hiding-In-Plain-Sight-Advances-In-Malware-Covert-Communication-Channels-wp.pdf
[15] 偽装・欺瞞のマスキーロフカ・モデル(maskirovka model)の五要素
[16] https://www.nationaldefensemagazine.org/articles/2019/8/20/army-developing-robotic-trauma-care-system
[17] https://groundedcuriosity.com/meet-carl-australias-future-soldier/ and https://www.dst.defence.gov.au/news/2018/10/02/next-generation-soldier-–-towards-2035
[18] 例えば「メタスキン(Meta-skin)」や調整可能な電磁フィルターによる「透明マント(invisibility cloak)」の実現
[19] 例えば、GD Surusプラットフォーム(https://www.gmhydrotec.com/product/public/us/en/hydrotec/Home.html#surus)
[20] 多目的電波観測・指向装置(VROD)/ VROD モジュラー適応型送信機(VMAX)(https://www.militaryaerospace.com/home/article/16709607/electronic-warfare-on-the-ground)
[21] https://arc.aiaa.org/doi/abs/10.2514/6.2005-4171
[22] 「将来戦闘チーム評価指標(Metrics for Assessing Future Combat Teams)」、防衛科学技術グループ、技術ノート2020、レスリー・コソウスキー(Lesley Kosowski)及びスヴェトスラフ・ガイドウ(Svetoslav Gaidow)、作成中。
