歩兵「攪乱部隊(Disrupt force)」の開発と作戦部隊における技術的実験 (Australian Army Occasional Paper)
インド太平洋の戦域で接近阻止/領域拒否の戦略を有する脅威国に対抗することを前提とした部隊の構造として米陸軍のマルチドメイン作戦(MDO)の作戦コンセプトに対応したマルチドメイン・タスク・フォース(MDTF)や米海兵隊の遠征前方基地作戦(EABO)の作戦コンセプトに対応したスタンドイン・フォース(Stand-in Force)がある。
1982年(昭和57年)にはじめて行われた日米方面隊指揮所演習(YS)は、2023年(令和5年)からはオーストラリア陸軍も参加し、日米豪共同指揮所演習(YS)として行われ、日米同盟の抑止力・対処力を一層強化するとともに、日米豪3か国の連携の強化が進められていると云われている。
この指揮所演習の中で、米陸軍のマルチドメイン・タスク・フォース(MDTF)や米海兵隊のスタンドイン・フォース(Stand-in Force)が作戦し、その有用性が検証されているだろうと推察する。
オーストラリア陸軍はどのような作戦コンセプトやそのコンセプトに対応した部隊を想定しているのだろうか。
ここで紹介するのは、オーストラリア国防軍が、インド太平洋の戦域で接近阻止/領域拒否の戦略を有する脅威国に対抗することを前提とした部隊の構造について2021年~2022年に実験した内容に関するオーストラリア陸軍のサイトに掲載されている記事である。
「skirmishing mist(ここでの訳は霧の散兵戦)」といわれる作戦コンセプトに対応した「disrupt force(ここでの訳は撹乱部隊)」に関する実験で、各種の無人のシステムや電子戦やサイバー脅威に対応できる能力を有ることや、分散化した運用を前提とした部隊構造の歩兵を中心とした部隊の有用性の検証結果の報告となっている。
我々が考えなければいけない「インド太平洋の戦域で接近阻止/領域拒否の戦略を有する脅威国に対抗すること」に関して大いに参考になる内容だと考える。(軍治)
![]()
歩兵「攪乱部隊(Disrupt force)」の開発と作戦部隊における技術的実験
Development of an Infantry ‘Disrupt force’ and Technological Experimentation in an Operational Unit
Chris Hall
Australian Army Occasional Paper No. 31
29 July 2025
クリス・ホール(Chris Hall )オーストラリア陸軍少佐は、連隊および司令部での様々な任務を経験した歩兵将校である。オペレーション・レゾリュート(Operation RESOLUTE)およびオペレーション・ハイロード(Operation HIGHROAD)でチームを指揮し、2021年から2022年にかけては沿岸環境における無人航空・地上システムの実験を指揮した。オーストラリア陸軍における直近の役職は、沿岸機動プログラム(Littoral Manoeuvre Program)における中型揚陸艇の管理だった。サザンクロス大学で経営学学士号(人事)を、ニュー・サウス・ウェールズ大学で能力管理修士号を取得している。現在、オーストラリア経営大学院で経営学修士号取得を目指している。
要旨
2021年から2022年にかけて、オーストラリア王立連隊第1大隊(1 RAR)は、無人航空システム(uncrewed aerial systems)と地上車両を増強した軽歩兵からなる「撹乱部隊(disrupt force)」の開発を実験的に実施した。このグループは、他の部隊に先んじて対抗部隊(opposing force)の状況を報告するだけでなく、敵の増援部隊や撤退ルートを待ち伏せ攻撃した。「撹乱部隊(disrupt force)」は対抗部隊(opposing force)とその計画を積極的に攻撃・弱体化させ、目標を分離し、友軍の戦闘チームが決定的な機動(decisive manoeuvre)を行うための条件を整えた。この実験の狙いは2つあった。個々のプラットフォームに関するフィードバックを提供することと、戦闘システムにおける技術の組み合わせを検証することである。本研究では、歩兵の運用に関する防衛科学技術のコンセプトを検証し、無人システム(uncrewed system)が急増しているインド太平洋の戦場において、歩兵がどのように闘い、生き残るかについての知見を提供した。
「撹乱部隊(disrupt force)」は敵の能力を効果的に撹乱し、会戦グループ(battlegroup)が目標に接近して奪取する速度を向上させた[1]。この部隊は比較的安価な手段を用いて敵の主要能力を無力化し、比較的少ない犠牲者しか出さなかった。したがって、部隊の展開に費やされた資源に比べて、不釣り合いな効果(disproportionate effect)であった。この結果は、米陸軍と英陸軍が行った研究と一致しており、これらの研究論文は、無人プラットフォーム(uncrewed platforms)によって強化された広範囲に分散した歩兵(dispersed infantry)に関するアイデアに収束しつつある。
これらの演習は、「撹乱部隊(disrupt force)」が用いるような戦術とその実現技術が、オーストラリア国防軍(ADF)に非対称的な優位性をもたらす可能性があり、更なる開発が必要であることを示唆している。実験の過程では、文化的および組織的な課題に直面し、反復的なプロセスが必要となった。しかしながら、この経験は、会戦グループ(battlegroup)が「撹乱部隊(disrupt force)」の開発を継続すべきであること、オーストラリア国防軍(ADF)が無人航空システム(uncrewed aerial systems)を用いた訓練をより適切に、そして大規模に実施できるようにすべきであること、そして実験チームが協力し、得られた教訓を共有することを支援することに大きな価値があることを示した。
本稿では、関連する歴史的戦術を近年の技術革新と併せて概観し、2年間にわたる実地実験について解説する。最後に、オーストラリア陸軍における戦術と実験の継続的な発展に向けた提言をまとめる。
「軽歩兵とはどういう意味か?それは狩人だということである」
ウィリアム・S・リンド(William S Lind)著「第4世代戦ハンドブック(4th Generation Warfare Handbook)」[2]
はじめに
2023年の防衛戦略見直し(DSR)では、アンガス・ヒューストン(Angus Houston)空軍大将とスティーブン・スミス(Stephen Smith)教授が、非対称の優位性を生み出す能力、すなわち敵の弱点をターゲットにし、非伝統的な方法によって不均衡なコストを課す能力を求めていた[3]。防衛戦略見直し(DSR)に続き、国防軍司令官とオーストラリア国防省長官は、オーストラリア国防省に「統合され集中した部隊の共同開発に重みと勢いを加えるアイデアを特定し、磨きをかける」よう要請した[4]。この目的のため、本稿では、2021年から2022年にかけて、主に無人システム(uncrewed system)で支援された歩兵で構成される「撹乱部隊(disrupt force)」を用いて、近い将来の会戦(near-future battles)に適した戦術を開発する実験について述べている。防衛戦略見直し(DSR)の指令に先行していたにもかかわらず、実験中に検討された戦術は、オーストラリア国防軍(ADF)が防衛戦略見直し(DSR)の下で要求する「不均衡な効果」をもたらす可能性を示した。
オーストラリア陸軍、特に戦闘部隊における実験に関する最近の文献はほとんどない[5]。しかし、2023年のオーストラリア陸軍組織変更により、第1装甲化連隊(1st Armoured Regiment)は専用の実験部隊に昇格した[6]。オーストラリアの戦略的状況については多くのことが書かれているが、本稿では戦術レベルに焦点を当て、次の戦争に適した部隊構造と戦術を探るという異なるアプローチを採用している。オーストラリアの状況における戦術の発展と、関与した兵士と将校の経験を検討する。定量的な比較、またはある戦術やプラットフォームが他よりも普遍的に優れているという主張は、現在オーストラリア陸軍にそのような結論を裏付けるデータが存在しないため、意図的に避けている。統計的な比較には、指揮官、兵士、プラットフォーム、地形、シナリオなどの変数を考慮する必要があるが、オーストラリア陸軍はこの種のデータを収集していない。代わりに、この研究は、現場での観察に基づいた記述的かつ定性的なアプローチを使用して、21 世紀の歩兵戦術の議論に情報を提供する軍事実践者の視点を提供する。
オーストラリア王立連隊第1大隊(1 RAR)は、軽歩兵撹乱部隊(light infantry disrupt force)の技術と戦術の実験を行った。部隊の任務は、待ち伏せ攻撃を実施し、偵察を行い、対抗部隊(opposing force)の背後にある目標への接近路を確保することであった。「撹乱部隊(disrupt force)」の構造と運用は、他の同規模の要素部隊とは異なっていた。90人から140人の人員で構成された「撹乱部隊(disrupt force)」は、少佐が指揮する小部隊本部を拠点とする諸兵科連合集団である戦闘チームを編成した[7]。戦闘チームは、2個歩兵小隊と1個装甲化部隊など、1つまたは2つの部隊と、いくつかの小さな追加部隊で構成されることが多い。これらのより伝統的な戦闘チームは、戦闘力と規模を提供する。目標の攻撃、地形の防衛、戦場での即時決着の強制に適している。しかし、実験で使用された戦術は、より小規模な分遣隊でより多様な能力で構成されていた。状況認識の獲得に重点を置いたチームと、対抗部隊(opposing force)への直接打撃をデザインした部隊が統合された。「撹乱部隊(disrupt force)」は、集中的な行動ではなく、数日かけて「敵(enemy)」を理解し、その能力を低下させ、計画を混乱させる作戦行動を行った。「撹乱部隊(disrupt force)」は対抗部隊(opposing force)を撹乱し、決定的な機動(decisive manoeuvre)のための条件を整えることに長けていたが、これらの演習では、特定の地形の占領や維持には適していないことが示された。さらに、「撹乱部隊(disrupt force)」を編成することで、他の戦闘チームが利用できるアセットが減少した。この状況により、会戦グループ(battlegroup)は他の場所でリスクを負わざるを得なくなり、「撹乱部隊(disrupt force)」は他の戦闘チームの成功のための条件を整える必要が生じた。
対部隊演習において、「撹乱部隊(disrupt force)」は対抗部隊の要素部隊(opposing elements)に圧力をかけ、友軍戦闘チームと会戦グループ(battlegroup)の作戦テンポを向上させた。会戦グループ(battlegroup)とは、中佐が指揮し、軍団司令部を拠点とする諸兵科連合部隊である。「撹乱部隊(disrupt force)」は、オーストラリア王立連隊第1大隊(1 RAR)を基盤部隊とするコーラル会戦グループ(Battlegroup Coral)、そして時には第2騎兵連隊を基盤部隊とする装甲化会戦グループ(armoured battlegroup)であるイーグル会戦グループ(Battlegroup Eagle)を支援した。重要なのは、「撹乱部隊(disrupt force)」が無人航空システムと地上システムを活用し、持久力、テンポ、そして致死性を向上させた点である。「撹乱部隊(disrupt force)」は、既知の能力ギャップを埋めるのではなく、文献レビューで概説されたいくつかのコンセプトに着想を得て、オーストラリア陸軍戦術をどのように改善できるかを探求する探究的なアプローチを採用した。
演習が進み、問題がより明確に定義されるにつれて、無人システム(uncrewed system)がより普及する中で、得られた教訓がインド太平洋地域で歩兵がどのように闘い、生き残ることができるかについて光を当てる可能性があることが明らかになった。航空、砲兵、装甲化部隊との相互作用はまた、歩兵と協力してこれらの軍団に戦術的選択肢を提供することもできる。問題を段階的に定義するこのアプローチは、無秩序に見えるかもしれない。しかし、著者のマクレガー・ノックス(MacGregor Knox)とウィリアムソン・マレー(Williamson Murray)は、軍事革命(military revolution)に関する優れた研究の中で、「革新と適応は厄介である…しかし、最終的には、戦場の結果は通常、どの軍事組織が最も効果的に革新したかを容赦なく明らかにする」と指摘している[8]。意図された機会と結果を定義する際の初期の課題は、改善の機会を放棄する十分な理由にはならなかった。
「撹乱部隊(disrupt force)」は、戦争の戦術レベルで高価な陸上アセットを危険にさらした。しかしながら、部隊の生成に必要な投資は正当であることが示された。「撹乱部隊(disrupt force)」の実戦での活躍は、小規模部隊の要素組織が砲兵、対装甲兵器、または無人システム(uncrewed system)を用いて装甲車両、搭乗員、乗員を破壊できれば、そのチームは投資額以上の成果を上げることができることを実証した。オーストラリアでのこの演習での経験は、オレクサンドラ・モロイ(Oleksandra Molloy)博士によるウクライナ戦争の教訓に関する研究結果と一致している。
UAS(無人航空システム)は敵対者のコスト賦課戦略(cost imposition strategy)に対する非対称的な対応策として機能し、ロボットや自律システムは、低コストで労力を節約しながら、遠距離から致死性を与えるのに効果的であることが示されている[9]。
これは、ウクライナにおけるオーストラリアの無人航空システム(UAS)運用者の経験とも一致する[10]。燃料トラックや指揮・統制ノードなどの兵站アセットは重要であるが、適切な資源を持つ小規模なチームによって混乱させられる可能性がある。無人システム(uncrewed system)で補強されていたとしても、歩兵が他の要素部隊に対して優れていると主張するのは単純化されるだろう。それどころか、他の要素部隊との統合が重要だった。最終的に、演習は、「撹乱部隊(disrupt force)」が生み出すコストよりも多くの価値を破壊する可能性があり、その結果、不均衡な効果をもたらす可能性があることを示した。この調査結果は、オーストラリア陸軍の根本的な再編を必要とせずに、不均衡な効果をもたらす戦術を開発し続ける方法について、会戦グループ(battlegroup)の指揮官と計画担当者に情報を提供することができる。
本稿では、西側諸国における歩兵戦術の考え方と、近年の紛争における無人システム(uncrewed system)の動向を検証する。次に、オーストラリア王立連隊第1大隊(1 RAR)が実施した実験の概要、戦術的観察の要約、問題点の解説、そして提言を行う。ロボット・システムや自律システムによる強化を受けた分散型軽歩兵部隊は、敵の計画を挫折させ、敵のアセットを消耗させることが、困難な演習によって実証された。この効果は、既存の歩兵部隊に無人システム(uncrewed system)を導入することで強化できる。この認識は、オーストラリア陸軍がこれらの戦術を開発し、投資するきっかけとなるはずだ。しかし、本稿を進める前に、よくある質問2点について考察しておく価値がある。すなわち、これらの戦術が標準的な戦術とどのように異なるのか、そして歩兵による運用が特殊作戦部隊(SOF)の運用とどのように異なるのか、である。
一般的な戦術との対比
「撹乱部隊(disrupt force)」のコンセプトは、会戦グループ(battlegroup)より遥かに先行して行動し、敵の計画策定を混乱させ、他の要素部隊による決定的な機動(decisive manoeuvre)の条件を整えることだった。「決定的な機動(decisive manoeuvre)」とは、上位階層の任務を達成するためにとられる行動と理解されていた。これは単に行動を形作るだけでなく、敵を局地的に撃破することを狙いとしていた。オーストラリア陸軍用語では、これはしばしば「決定的出来事(decisive event)」を達成することであった。例えば、会戦グループ(battlegroup)が敵の目標を排除する必要がある場合、「撹乱部隊(disrupt force)」は別の戦闘チームがその目標を突撃する(assault)ための条件を整える。
これらは典型的な「遮蔽(screen)」や「警護(guard)」行動ではなかった。オーストラリアのドクトリンでは、「遮蔽(screen)」とは「保護対象の部隊に早期警戒を提供する治安作戦の一形態」である[11]。「撹乱部隊(disrupt force)」はしばしばこの効果をもたらしたが、対抗部隊のアセット(opposing assets)に重大な損耗をもたらした。一方、「警護(guard)」とは「時間稼ぎのために闘いながら主力を守り、同時に観察と情報報告を行い、敵の地上観測を阻止することを主なタスクとする治安作戦の一形態」である[12]。この定義はオーストラリア王立連隊第1大隊(1 RAR)の実験で使用されたモデルに近いが、「撹乱部隊(disrupt force)」は通常、対抗する戦闘チーム(opposing combat teams)と友軍主力部隊の間に配置されるのではなく、対抗部隊(opposing force)の後方および側面で作戦した。「警護(guard)」はまた、敵と決定的に交戦するのに十分な戦闘力を有しており、これは「撹乱部隊(disrupt force)」には通常欠けていた[13]。最も近い戦術的タスクは「攪乱(disrupt)」であり、「直接射撃と間接射撃、地形、障害物を統合して敵の隊形やテンポを乱す」ことである[14]。しかし重要なのは、調整された部隊構造の使用と決定的な機動(decisive manoeuvre)のための条件設定に重点が置かれていたため、実験は単に遮蔽(screen)、警護(guard)、攪乱(disrupt)のタスクを与える以上の幅広いものであったことである。
特殊作戦部隊との対比
「撹乱部隊(disrupt force)」の戦術と意図は、特殊部隊を模倣したり、「SAS(特殊空挺部隊)ライト版」となることを目指したものではなかった。両部隊は募集、訓練、運用方法が異なっている。オーストラリア特殊部隊は特別に選抜された部隊であるのに対し、この実験では汎用歩兵が使用された[15]。優れた歩兵戦術は会戦に勝利することで戦術的・作戦的成果を達成するが、特殊部隊は戦争の戦略レベルで必要とされる「国家任務部隊(national mission force)」である[16]。オーストラリアの著述家ジェームズ・イーストン(James Easton)とジョシュア・コロ(Joshua Kolo)は、戦略的競争における特殊部隊の有用性は、決定的な戦術行動ではなく、持続的な戦役遂行から生まれると断定している[17]。したがって、歩兵戦術は、特殊作戦コマンド(Special Operations Command)の取組みに依存しない選択肢を指揮官に提供する必要がある。最後に、特殊部隊はどこにでも存在できるわけではなく、どこにでも必要とされるわけでもない。アンドリュー・ホッキング(Andrew Hocking)少将は、アフガニスタン戦役の教訓として、歩兵は特殊部隊に比べて「訓練が不十分であり、あるいは死傷リスクが高い」という「誤った認識」が存在していた可能性があると指摘した[18]。特殊部隊は優れた戦術を独占しているわけではない。歩兵が任務を遂行できる場合は、歩兵が任務を遂行し、特殊部隊は彼らだけが遂行できるタスクに集中できるようにすべきである。これは戦争の原則である「取組みの経済性(economy of effort)」と合致する[19]。
文献レビュー
近接戦闘と戦術の戦略方向への関連性
防衛戦略見直し(DSR)とその結果として策定された2024年国家防衛戦略は、どちらも誘導兵器と部隊構造の改革を重視しており、近接戦闘能力を重視しているようには見えないかもしれない。しかし、防衛戦略見直し(DSR)は「完全に機能し、統合された水陸両用能力を備えた諸兵科連合システム」を求めている[20]。本稿で述べられているように、水陸両用演習では多くの実験が行われた。防衛戦略見直し(DSR)は、領域拒否システムを用いた拒否戦略を推奨している[21]。本稿では、インド太平洋地域において、「撹乱部隊(disrupt force)」が領域拒否システムをターゲットとする陸上の敵を発見・攪乱することで、領域拒否システムを支援することを提案している。
2023年、オーストラリアの学者アンドリュー・カー(Andrew Carr)博士とステファン・フリューリング(Stephan Frühling)教授は、インド太平洋地域での「前方プレゼンス(forward presence)」のためのオーストラリアの部隊配置オプションを検討し、国内地域を超えて編成された部隊または小部隊を配備することを提案した[22]。オーストラリア王立連隊第1大隊(1 RAR)の実験中に想定されたシナリオの1つは、第二次世界大戦の沿岸監視部隊を彷彿とさせる、沿岸環境にあるターゲットを破壊するために歩兵チームが打撃アセットを指示するというものである。カー(Carr)とフリューリング(Frühling)の研究は歩兵に焦点を当てていないが、彼らはオーストラリアが「高度に分散した小規模戦闘グループ」が火力を要請できることの価値について議論していることを指摘し、沿岸監視部隊と同様の比較をしている[23]。沿岸監視部隊のコンセプトは「撹乱部隊(disrupt force)」よりも監視に重点を置いているが、歩兵チームが他のアセットを要請する適切な例を提供している。
国家防衛戦略は、「陸軍が戦略的な地上陣地を確保し、管理できるようにする」ことの必要性を強調している[24]。歩兵は、統合部隊が闘う目標を含め、土地の奪取と保持に不可欠である[25]。オーストラリアの研究者アルバート・パラッツォ(Albert Palazzo)博士は、防衛戦略見直し(DSR)に記載されている部隊の中で軽歩兵が「重要な役割」を担っていると述べ、ミサイル砲台の展開を支援する歩兵の例を示している[26]。同様に、カー(Carr)とフリューリング(Frühling)は、抑止政策を採用している場合でも「領土の奪取と保持は依然として重要」であると主張している[27]。誘導兵器や接近阻止システムは、歩兵が戦場でもたらす決定的な結果に取って代わることはできない。実際、歩兵はこれらのシステムの展開に不可欠となる。
オーストラリア歩兵が近接戦闘に突入した場合、拒否による抑止戦略は失敗するという指摘が筆者に寄せられている。しかし、オーストラリア陸軍司令官サイモン・スチュアート(Simon Stuart)中将は、「ランド・フォース2024」における演説で、この考え方の危険な魅力を指摘し、「政治的暴力を遠隔地で、リスクなしで、迅速かつ掃討する」という技術の虚偽の約束に警鐘を鳴らした[28]。オーストラリアの戦闘要素部隊は、近接戦闘が必要ない、あるいはオーストラリアが近接戦闘を行わない選択をできると想定するのではなく、熟練した、そして致死性の戦力を持つべきである。クラウゼヴィッツ(Clausewitz)が敵について書いたように、「敵が私に指示するのと同じくらい、私が敵に指示するのだ」[29]。
攪乱の効果を伴う分散化した歩兵の運用
歩兵は、敵の計画を撹乱するために分散したチーム(dispersed teams)で作戦行動をとる長い歴史を持っている。第二次世界大戦では、ドイツ軍が「浸透戦術(infiltration tactics)」を採用し、1920年代まで陸戦(land warfare)に関する議論に影響を与えた。英陸軍将校から作家に転身したジム・ストー(Jim Storr)は、「浸透戦術(infiltration tactics)」を「複雑で動的な状況で敵の指揮官を混乱させ、気を逸らす[30]」ことを狙いに「戦場のすぐ近くで、通常は敵の側面と後方の弱点を見つけて攻撃する[31]」ことだと要約している。敵の意思決定を撹乱するというこのテーマは、歩兵戦術の発展においても引き継がれている。
第二次世界大戦中、ビルマ戦役で連合軍第14軍司令官を務めたウィリアム・スリム(William Slim)元帥は、日本軍と英連邦軍の歩兵部隊が「ロードブロック(roadblock)」を使用したことを記録している。これらのチームは敵陣の背後に待ち伏せや防御陣地を築き、補給と撤退ルートを遮断した[32]。「浸透戦術(infiltration tactics)」から「ロードブロック(roadblock)」まで、歩兵は敵の背後に潜入する長い歴史を持っている。
米国の作家ウィリアム・S・リンド(William S Lind)とグレゴリー・A・ティール(Gregory A Thiele)による2015年の軽歩兵の運用に関する研究は、「撹乱部隊(disrupt force)」の実験に影響を与えた。リンド(Lind)とティール(Thiele)は、軽歩兵は包囲されても平気で、補給なしで長期間作戦でき、待ち伏せの精神を持つべきだと主張した[33]。このような部隊は「浸透によって攻撃し、待ち伏せによって防御する」必要があり、敵の強みを避け、敵が弱く準備ができていない場所や瞬間をターゲティングする必要がある[34]。著者は軽歩兵を「戦場のハンター(hunters on the battlefield)」と表現している[35]。このコンセプト化は単純すぎるように見えるかもしれないが、「撹乱部隊(disrupt force)」のコンセプトに関わった兵士の共感を呼び、実験に活力を与える精神を生み出し、維持した。
最近の研究では、軽歩兵戦術が技術によってどのように可能になるかが探究されている。多くのコンセプトでは、無人システム(uncrewed system)によって支援される広範囲に分散したチーム(dispersed teams)で歩兵が用いられる。例えば、2018年、米陸軍将校のザカリー・L・モリス(Zachary L Morris)は「軽歩兵ロボット中隊」を提案した。これは、無人地上車両が中隊の最重量火器を搭載する部隊である[36]。この部隊は、対人および対戦車能力を備えた無人航空システム(uncrewed aerial systems)も使用する[37]。モリス(Morris)は、ロボット・システムの指揮・統制における課題を認識しつつも、このコンセプトは致死性と状況把握を向上させると主張している[38]。モリス(Morris)が提案した迫撃砲や対装甲化チームなどの専門歩兵を含む構造は、オーストラリア王立連隊第1大隊(1 RAR)の実験に影響を与えた[39]。
2019年、米国の学者ベンジャミン・ジェンセン(Benjamin Jensen)教授と軍事研究プロジェクト・マネージャーのジョン・パシュケヴィッツ(John Paschkewitz)は、「モザイク戦(mosaic warfare)」を提唱した。これは、歩兵を徘徊型弾薬のような小型で柔軟なシステムで支援する戦法である[40]。これらの兵器は、ある地点の周囲を飛行、つまり「徘徊(loiter)」し、ターゲットを発見すると攻撃を開始する[41]。「モザイク戦(mosaic warfare)」では、各チームは必要に応じて分散し、指揮官の裁量で戦闘力を集中させることができる。ウォーゲームでは、これらの要素部隊が高価な陸上プラットフォームを破壊し、諸兵科連合の闘い(combined arms fight)に勝利した。これにより、部隊による野外での更なる実験の必要性が高まった。彼らの研究は、無人システム(uncrewed system)によって強化された歩兵の進化を継続させている。
オーストラリアの防衛科学技術グループは、2020年に発表した「半自律戦闘チーム(semi-autonomous combat team)」と「霧の散兵戦(skirmishing mist)」という2つのコンセプトで議論に貢献した。どちらのコンセプトも歩兵と無人システム(uncrewed system)を組み合わせたものだが、チームの集中度と専門性が異なっていた。どちらも2021年と2022年に行われたオーストラリア王立連隊第1大隊(1 RAR)の実験に影響を与えた。まず、マシュー・ソーワーズ(Matthew Sawers)博士とキム・タン(Kim Tang)が考案した「半自律戦闘チーム」のコンセプトは、地上車両からセンサーや小型ロボットに至るまでの無人システム(uncrewed system)で増強された歩兵戦闘チームを説明している[42]。理想的には、これらのシステムはある程度の自律性を持ちながら、「戦闘クラウド(combat cloud)」と呼ばれる安全な無線ネットワークを通じて指揮される[43]。状況認識を提供するセンサーには、熱、音響、レーダーなどがある[44]。「半自律戦闘チーム」のコンセプトは、3個の班からなる3個小隊という伝統的な構造を維持しつつ、近接戦闘においてはロボット・システムを優先する。著者らが歩兵将校、下士官、技術専門家らと実施したワークショップでは、この構造により状況認識が向上し、より高い致死性と打撃距離が達成されたと結論づけられた[45]。
対照的に、ニコラス・ケンプト(Nicholas Kempt)によって開発された「霧の散兵戦(skirmishing mist)」のコンセプトは、指揮、偵察、サイバー電磁気、開拓、打撃、および支援機能を含む小規模な専門チームによる無人システム(uncrewed system)を視覚化した[46]。3つにグループ化されるのではなく、20人の兵士からなる25チームが単一の司令部に報告する。したがって、「霧の散兵戦(skirmishing mist)」は、現在の戦闘チームまたは会戦グループ(battlegroup)とは異なる闘いを行う。各チームが一緒に機動することはめったになく、敵を発見して混乱させるエリアが割り当てられる[47]。チームはヘリコプター、上陸用舟艇または小型ボートを使用して戦場に投入され、その後、責任エリアに移動する[48]。無人システム(uncrewed system)の追加にもかかわらず、この機動の計画(scheme of manoeuvre)は、軽歩兵には下級指揮官の指揮下にエリアを割り当てるというリンド(Lind)とティール(Thiele)の推奨事項と一致している[49]。したがって、技術に関係なく、分散(dispersion)は戦術コンセプトの重要なテーマであり続ける。
「霧の散兵戦(skirmishing mist)」の中で、偵察セル(reconnaissance cells)は他の部隊による打撃のためにターゲットを「タグ付け」する。一方、近接戦闘で交戦を意図したチームは「打撃セル(strike cells)」のみであり、可能な限り無人システム(uncrewed system)を使用する[50]。先駆セル(pioneer cell)は爆破や障害物によって敵の機動性を制限し、サイバー電磁チームは敵の通信を妨害する。このコンセプトは、砲兵、長距離火力、または無人戦闘航空機を駆使した諸兵科連合アプローチを用いてターゲットを破壊する。重要なのは、「霧の散兵戦(skirmishing mist)」が装甲化連隊のようなはるかに強力な要素部隊による決定的な機動(decisive manoeuvre)の条件を整えることである[51]。著者らが要約するように、「このコンセプトは万能の唯一の解決策ではない」が、分散した歩兵(dispersed infantry)が決定的な機動(decisive manoeuvre)の条件を整えるというこのテーマは、オーストラリア王立連隊第1大隊(1 RAR)の実験にも引き継がれた[52]。
2022年、英陸軍の要素部隊はインテリジェンス・監視・ターゲット捕捉・偵察グループを編成した。この専門歩兵チームと有人システム(crewed system)および無人システム(uncrewed system)の組み合わせは、部隊対部隊演習において効果を発揮した[53]。西側諸国の別の軍隊が、この「撹乱部隊(disrupt force)」と同様の戦術を独自に開発しているという事実は、有人システム(crewed system)と無人システム(uncrewed system)によって支援される戦闘歩兵の収束的進化の存在を示唆している。
無人システム(uncrewed system)の運用
無人システム(uncrewed system)は現在、戦争に関する報道や議論で大きな注目を集めているが、その基本的な技術は数十年前から利用可能であった。1991年、米国、英国、フランス、イラクは無人航空システム(uncrewed aerial systems)を戦闘に投入した[54]。1992年、オーストラリア空軍のギャリー・ウォーターズ(Gary Waters)空軍中佐は湾岸戦争に関する研究論文を発表した[55]。彼は無人航空システム(uncrewed aerial systems)の戦術偵察能力とその比較的安価さを指摘した[56]。1999年、中国は高性能徘徊型ミサイル「ハーピー」を導入した[57]。その後、世界対テロ戦争において、オーストラリアの主要同盟国である米国は無人システム(uncrewed system)の使用を増加させた。シャドウ無人航空システム(Shadow uncrewed aerial system)は2004年に米陸軍に導入され、スイッチブレード徘徊型弾薬は2012年に導入された。注目すべきは、どちらのシステムも特殊部隊向けの特別な能力とはみなされておらず、むしろ汎用部隊向けにデザインされていたことである[58]。無人システム(uncrewed system)は、今日の兵士の一部が生まれる前から戦闘で使用されてきた。したがって、その導入は目新しいものでも革新的なものでもない。
2014年、ロシアはウクライナで砲撃要請を行うために無人航空システム(uncrewed aerial systems)を使用した[59]。この出来事を受けて、2015年にはオブザーバーが将来の紛争でこのようなシステムの使用が増加すると警告した[60]。その後、ナゴルノ・カラバフ紛争とウクライナにおける現在の紛争で、無人航空システムは広く使用された[61]。ウクライナからの予備的な教訓を概説する中で、ミハイロ・ザブロツキー(Mykhaylo Zabrodskyi)中将率いる執筆者たちは、「[無人航空システム(uncrewed aerial systems)]は…すべての軍種と階層で利用可能でなければならない」と警告した[62]。
無人システム(uncrewed system)に対して批判的な著者もいる。ナゴルノ・カラバフ戦争のデータを分析したイスラエルの防衛アナリスト、エアド・ヘクト(Eado Hecht)博士は、成功したミッションのみが公表されているため、無人システムの有効性に関する認識が歪められていると主張する。ヘクト(Hecht)博士は、無人航空システム(uncrewed aerial systems)はアゼルバイジャンの戦場での成功に必要ではあったが十分ではなく、その効果は誇張されていると結論付けている[63]。アントニオ・カルカラ(Antonio Calcara)博士らの研究者は、無人システム(uncrewed system)における重機の損傷を指摘し、それを要素部隊間の相互作用のより広範な組み合わせの一部と見ている[64]。著者らは、無人システム(uncrewed system)は空のドメインにおける継続的な「隠蔽対発見(hider-finder)」の力学の一部であると主張している[65]。著者らはドローン革命という考えを否定している[66]。しかし、この批判的な検討でも、無人航空システム(uncrewed aerial systems)は地上部隊を含む他のシステムと統合されれば効果的であり、言い換えれば、諸兵科連合効果の一部となると結論づけられている[67]。実際、ヘクト(Hecht)とカルカラ(Calcara)らの研究は、出版された批評家でさえ無人航空システム(uncrewed aerial systems)の有効性を完全に否定していないことを示している。
同盟国および敵対者はロボットおよび自律システムの開発と配備を続けている。米国防省の議会への報告書は、中国が監視、偵察および打撃機能のために人間と機械のチーム(human-machine teams)、無人航空システム(uncrewed aerial systems)、スウォーミング技術を開発していることを強調している[68]。マリでの作戦では、オーストラリア製の無人航空システムDrone 40が英国によって配備され、無人地上車両THeMISがエストニアによって配備された[69]。THeMISシステムはウクライナにも配備されており、非常に高く評価されているため、ロシアは鹵獲に懸賞金をかけた[70]。ウォール・ストリート・ジャーナルの報道によると、現在のウクライナ紛争はロシアの装甲車がウクライナのドローンに対して脆弱であることを示したという[71]。これに対応して、ロシアはますます多くの高度な監視システムと神風ドローンを配備している[72]。ウクライナにおけるこの大量使用は、敵の装甲車両を破壊するために歩兵がドローンを配備するという「緊急の(urgent)」要求を米軍が表明するきっかけとなったことは間違いない[73]。無人システム(uncrewed system)はより致死的になり、より一般的になってきていることは明らかである。

THeMISシステム 訳者による挿図 |
無人システム(uncrewed system)はもはや「新興技術(emerging technology)」ではないと言っても過言ではない。小型無人航空システム(small uncrewed aerial systems)とその対抗手段に関する包括的な論文の中で、カール・ローズ(Carl Rhodes)博士は、これらのシステムは「世界の主要軍事力の一部に対して既に有効であることが証明されている」ため、「将来の脅威であるだけではない」と指摘している[74]。したがって、オーストラリア国防省とオーストラリア国防軍(ADF)は、これらのシステムが戦場で広く使用されるようになることを想定すべきである。
無人システム(uncrewed system)の普及度に関わらず、その評価ではオーストラリア陸軍が意図する効果と作戦環境に適合するかどうかを検討する必要がある[75]。オーストラリア陸軍のジェームズ・イーストン(James Easton)将校とジョシュア・コロ(Joshua Kolo)将校は、特殊作戦であってもローテク能力を基盤とし、ハイテク・アセットで補強すべきだと主張している[76]。ロボット・システムや自律システムの限界には、情報セキュリティ、データ帯域幅、現在のシステムに存在する限られた自律性などがある[77]。さらに、インド太平洋のジャングル、狭い道、熱帯雨季は、無人システム(uncrewed system)にとって必然的に課題となる。しかし、オーストラリア陸軍の主要プラットフォームはすべて環境によって制約される可能性があるため、これらの課題は能力を却下するには不十分である。無人システム(uncrewed system)は、農業、農村、都市、沿岸地域で小規模な部隊に強化された状況認識と打撃能力を提供するだろう。
オーストラリア陸軍は現在、武装した無人システム(uncrewed system)や徘徊型弾薬を配備していない[78]。しかし、オーストラリア陸軍は2025年に初の徘徊型弾薬であるスイッチブレード300を配備する予定である[79]。この能力が汎用部隊に広く配備されるか、あるいは少数のユーザー向けのブティック能力として保持されるかはまだ分からない。死傷者を吸収する能力が限られているオーストラリア陸軍は、敵が発見される前に敵を発見して打撃するよう努めるべきであり、無人システム(uncrewed system)はその機能において非常に効果的である。無人システム(uncrewed system)は万能薬とは考えられていないが、それでも2020年代の諸兵科連合システムの不可欠な部分となるはずである。
「ダーク・ミスティック」―無人システム(uncrewed system)による致死的武力の倫理的・法的影響
よくある誤解にもかかわらず、無人システム(uncrewed system)は他の兵器と同じ国際人道法の対象となっている。すべての新型兵器は、ジュネーブ条約第1追加議定書第36条に基づいて合法性が審査される。米国の法学准教授レベッカ・クルートフ(Rebecca Crootof)は、第36条はすでに自律システムを包含しており、自律システムに特化した追加条約はないと主張している[80]。同様に、ストックホルム国際平和研究所は、国際人道法は自律機能や兵器システムを排除していないことを発見した[81]。この研究では、使用者は「武力行使の影響を合理的に予見し制限する」必要があり、この要件はすべての兵器に適用されると指摘している[82]。オーストラリアの研究者ダミアン・コープランド(Damian Copeland)らは、高度な自律性を持つ兵器は状況によっては自律性を制限する必要があるかもしれないが、それでも合法的に使用できることを発見した[83]。全体として、自律性があっても無人システム(uncrewed system)の使用に対する動かせない法的障害はない。
オーストラリアの国会議員はこの考えに前向きな姿勢を示している。2015年のオーストラリア上院の調査では、オーストラリアは「無人プラットフォーム(unmanned platforms)に関連するものも含め、自律型兵器システムの規制体制を確立するための国際的な取り組みを支持する」よう勧告された[84]。しかし、同じ調査では、オーストラリア国防軍(ADF)が「能力要件が存在し、オーストラリア政府がその使用に関する政策声明を発表する場合、武装無人プラットフォーム(armed unmanned platforms)を取得する」ことも勧告されている[85]。オーストラリアの著述家アラン・ギンゲル(Allan Gyngell)氏とステファニー・クーリー(Stephanie Koorey)博士は、オーストラリア政府は自律型致死兵器システムの禁止は時期尚早と考えていると指摘している[86]。実際、オーストラリア国防省は、ロシアからの苦情にもかかわらず、ウクライナによるオーストラリア製ドローンのロシアに対する使用を公に擁護している[87]。既存の規制枠組み内で無人システム(uncrewed system)から致死的な武力を行使することには法的および政治的な支持があることは明らかであるため、そのようなシステムを「撹乱部隊(disrupt force)」のコンセプトの一部として使用することは合法であり、政治的に受け入れられる可能性が高い。
もちろん、兵器の合法的な使用が倫理的な使用を保証するわけではない。「キラー・ロボットを止めよう」キャンペーンは、自律システムによる致死的な武力の使用を懸念する社会的な要素があることを示している[88]。おそらくこれが、2015年の上院調査でオーストラリア国防省に「軍用無人プラットフォーム(military unmanned platforms)に関する広報を強化する」よう勧告したのに影響を与え、プラットフォームに対する認識には「暗い神秘主義」があると述べた[89]。しかし、無人システム(uncrewed system)による人命の損失を避けたいという願望は、オーストラリア国防軍(ADF)の人員の不必要な損失とバランスを取らなければならない。例えば、無人航空システム(uncrewed aerial systems)は人員の危険を減らし、そうすることでオーストラリア人の命を救うことができる[90]。無人システム(uncrewed system)の運用をめぐる法的および倫理的問題は、オーストラリア王立連隊第1大隊(1 RAR)の実験の焦点ではなかったが、オーストラリア国防省の外部関係者が「撹乱部隊(disrupt force)」のメンバーにこれらの懸念を提起した。兵士を重視する国家は、無人システム(uncrewed system)でタスクを遂行できるにもかかわらず、兵士を負傷や死亡、あるいは任務失敗にさらすことの倫理性について検討しなければならない。この観点から、オーストラリア陸軍は2025年からスイッチブレード300を運用するために、残存するあらゆる不安を迅速に解消しなければならない[91]。
部隊対抗(Force-on-Force)演習の実験
2021年、オーストラリア王立連隊第1大隊(1 RAR)の指揮官は戦闘チーム「チャーリー(Charlie)」に空中機動作戦における部隊の能力開発のタスクを付与した。空中機動作戦とは、ヘリコプターで長距離や起伏の多い地形を移動し、敵に対する任務を遂行する作戦である。戦闘チーム「チャーリー(Charlie)」は、空中移動による突入に重点を置いた「撹乱部隊(disrupt force)」を編成する。この場合、「撹乱部隊(disrupt force)」のコンセプトは、会戦グループ(battlegroup)の約20キロメートル前方に展開して偵察を行い、敵のルートと車両の隠れ場所を撹乱することに集中していた。したがって、空中移動が最良の展開方法であると判断された。その意図は、部隊が主要な道路の交差点、小川の横断地点、および進入路を占拠することで会戦グループ(battlegroup)のテンポを上げ、後続の戦闘チームがそれらを通過して突撃目標(assault objectives)に急いで向かえるようにすることであった。
その狙いは対抗部隊(opposing force)を攻撃し、その計画を混乱させることだった。部隊が目標地点またはその射程圏内に着陸する「航空強襲(air assaults)」は、装甲化部隊に対して極めて危険であり、「撹乱部隊(disrupt force)」を分散させるのではなく集中させてしまうだろう[92]。そのため、「撹乱部隊(disrupt force)」は「縦深(deep)」空中機動作戦を採用する。「縦深(deep)」のコンセプトは作戦規模によって異なるが、「縦深」空中機動作戦は、会戦グループ(battlegroup)の最初の目標地点を過ぎ、敵の後方地域に十分に入り込んだ歩兵を投入することで計画策定上区別される。このアプローチにより、「撹乱部隊(disrupt force)」がすぐに発見される可能性は低くなった。また、部隊は目標地点に到達するために何キロメートルも徒歩で行軍することになり、追加の食料と水が必要になることも意味した。
実現技術
2種類の小型車両が「撹乱部隊(disrupt force)」の増強に役立った。まず、補給なしで会戦グループ(battlegroup)の前方で作戦活動を継続するために、ハンター・ウルフ(Hunter Wolf)無人地上車両が配備された。ハンター・ウルフ(Hunter Wolf)は腰高の車輪を備えた車両で、最大1.5トンの積載量があり、ディーゼル電気モーターを2基搭載し、操縦士と兵士が操縦する[93]。

ハンター・ウルフ無人地上車両 出典:HDT Global提供 |
戦闘チームには、無人地上車両と直接比較して、それぞれの優位性と欠点を評価できるように、ポラリス有人全地形対応車両(Polaris crewed all-terrain vehicles)も提供された。

シー・エクスプローラー2022演習中、オーストラリア海軍のHMASアデレードの兵士がポラリス有人全地形対応車両(Polaris crewed all-terrain vehicles)を運転している。 出典:国防画像ギャラリー[94] |
「撹乱部隊(disrupt force)」は市販のマルチローター無人航空システム(multi-rotor uncrewed aerial systems)を入手し、偵察方法と戦術の開発に活用した。オーストラリア陸軍はこれらの製品に関するフィードバックを求めていたため、一部の兵士はDefendtex社のDrone 40やDrone 155といった軍用無人航空システム(military uncrewed aerial systems)の訓練も受けた。Drone 40は直径40mmのクワッドコプターで、モジュール式のペイロードは偵察用のカメラやターゲット攻撃用の高性能爆薬を搭載出来る[95]。Drone 155は、より長い航続距離とより重いペイロードを搭載できるようにデザインされた大型のフォーム・ファクターである。

ディフェンドテックス ドローン 40 出典: Defendtexデータシート |
最後に、「撹乱部隊(disrupt force)」はオープンソースの「会戦管理システム(battle management system)」「Android Team Awareness Kit」(ATAK)を搭載したSamsung Galaxy S9スマートフォンを導入した。これは、S9などの携帯端末にインストールされるAndroidアプリケーションである。このアプリは、無線メッシュ・ネットワーク内のチーム間で命令や報告をやり取りし、各デバイスの位置を表示する[96]。他の「会戦管理システム(battle management system)」と同様に、このアプリも他のデバイスの範囲内にあり、電子戦による妨害を受けないことを前提としている。下の画像はユーザー・インターフェースを示している。

ハンドヘルド・デバイスにロードされた Android チーム認識キット 出典: Google Playストア[97] |
小型車両、無人航空システム(uncrewed aerial systems)、「会戦管理システム(battle management system)」の組み合わせは、戦闘チームの持久力と状況認識力を向上させることを意図していた。その後の演習では、人間と機械のチームが、人間のみで構成されるチームよりも効果的に闘うことができる方法を探求した。しかし、このようなチーム編成は、戦闘チームに新たな戦術的摩擦の兆候を察知させることも期待されていた。1つの戦闘チームに複数の技術を組み合わせることで、1つの製品の有効性だけでなく、インド太平洋地域における人間と機械の歩兵チームの闘い方と生存方法について、より広範な考察が得られる可能性がある。したがって、これらの演習は、現有部隊への即時的な戦術訓練と、技術と戦術を統合するための長期的な実験という2つの狙いを持って実施された。演習には数百人の将校と兵士が参加し、数千時間を現場で過ごし、様々なオブザーバーにとって時間の経過とともにテーマが浮かび上がってきた。表1は、2021年と2022年の演習における「撹乱部隊(disrupt force)」の運用をまとめたものである。
表1:戦闘チームと主要演習、2021~2022年
| 演習 | 期間 | 参加人数 | 主要構成 | 重点項目 |
| 戦闘員会戦グループ(Battlegroup Warfighter)演習 | 10日間 | 90名 | 小銃部隊と付属品 | 深海空中機動作戦、無人システム(uncrewed system)の初期実験、有人全地形対応車両と無人地上車両の比較 |
| タリスマン・セイバー演習 2021 | 14日間 | 90名 | 小銃部隊と付属品 | 無人プラットフォームの運用の改善、会戦グループ(battlegroup)の目標に関する条件の設定 |
| シー・エクスプローラー演習2022 | 14日間 | 100名 | 支援中隊の専門歩兵チーム | 水陸両用作戦のための「撹乱部隊(disrupt force)」を形成する専門セル |
| 第3旅団戦闘員演習 | 14日間 | 120名、150名に増加 | 専門歩兵に加え、騎兵、工兵、偵察、電子戦 | 装甲化会戦グループ(armoured battlegroup)における専門歩兵の統合 |
初期の部隊対抗実験 ― 戦闘員会戦グループ(Battlegroup Warfighter)演習
「撹乱部隊(disrupt force)」の最初の主要活動は、オーストラリア陸軍戦闘訓練センターが審査する戦闘員会戦グループ(Battlegroup Warfighter)演習だった。戦闘員演習(Warfighter Exercise)は、訓練対象者と対抗部隊(opposing force)の両方が「勝利(win)」を狙った、厳しい部隊対抗の活動である。兵士と車両は「撃たれた(shot)」ことを検知するセンサーを搭載しており、臨場感を高めている。戦闘訓練センターは部隊の位置を記録し、「死傷者(casualties)」を認定し、部隊が教訓を収集するのを支援する。この厳しい環境は、コンセプトの検証と現実的な観察を行うのに最適だった。
2021年、「撹乱部隊(disrupt force)」は3個小銃小隊、対装甲班、そして時には狙撃手2名と偵察パトロール隊で構成されていた。クイーンズランド州タウンズビル近郊で10日間にわたって実施されたこの戦闘演習は、「撹乱部隊(disrupt force)」が空中機動作戦によって「戦場(battlefield)」に突入することから始まった。その後、部隊は目標地点まで約15キロメートルを徒歩でパトロールし、対抗部隊(opposing force)の位置と動きを偵察した。当初、「撹乱部隊(disrupt force)」は観察と報告に重点を置いた。その後、対装甲兵器を用いてルートを待ち伏せし、車両隠蔽物への砲撃を要請し、前進する会戦グループ(battlegroup)が必要とする小川の渡河を確保した。決定的な交戦を避けるため、「撹乱部隊(disrupt force)」は攻撃や地域防御といった戦術は採用しなかった。代わりに、2 回の複数日にわたる反復で、「撹乱部隊(disrupt force)」は縦深空中機動作戦を通じて目標に接近し、対抗部隊(opposing force)を妨害し、会戦グループ(battlegroup)が目標を達成するための条件を整えた。
全地形対応型および無人地上車両は、物資を積載した、極めて重要な兵器だった。ハンター・ウルフ(Hunter Wolf)車両はそれぞれ、小隊あたり2日分の物資を搭載し、モーターから無線用バッテリーを充電できた。この機能により、戦闘チームはより遠く、より速く、より軽い荷物で移動し、車両を人目につかない場所に保管して、後で補給に使用することができた。各小隊は、操縦者から数キロメートルの範囲内に無人航空システム(uncrewed aerial systems)を搭載していた。したがって、これらのシステムは、パトロールと有人観測所によって階層化されていた。ATAK装置は、アンテナとともに戦闘チーム全体に拡散され、メッシュ・ネットワークを形成していた。これらの技術を組み合わせることで、耐久性、機動性、および状況認識が向上した。もちろん、すべてが計画どおりに進んだわけではない。さまざまなシナリオと環境で限界をテストするため、実験中にはそのような摩擦が予想される(むしろ歓迎されるべきことである)。
戦闘員会戦グループ(Battlegroup Warfighter)演習から学んだ教訓
無人システム(uncrewed system)の有用性を最大限に引き出すには、相当の訓練時間が必要である。初期のパトロールでは、無人地上車両が深い小川に閉じ込められ、復旧に時間と労力を要した。こうした遅延により、車両のバッテリーは予想以上に早く消耗し、騒音の大きいディーゼル・エンジンの使用につながり、対抗部隊(opposing force)に発見されるリスクが高まった。この経験に基づくと、無人地上車両は役に立たなかったと結論付けたくなるかもしれない。しかし、真の教訓は、「撹乱部隊(disrupt force)」が厳しい演習の前に十分な訓練を行っていなかったことであり、一部の状況はユーザー・エラーによって引き起こされた。すべてのプラットフォームは、完全な能力を発揮するためにはオペレーターの熟練度が必要である。演習が進むにつれて、兵士たちは無人地上車両をより効果的に使用し、完全な能力を発揮するための訓練の重要性を強調した[98]。
小型支援車両は歩兵の持久力を高める。全地形対応型無人地上車両は、チームが任務の合間に帰還する小規模な補給基地として有用であることが証明された。これらの車両がなければ、歩兵は5日間以上持ちこたえるための物資、特に十分な水を運ぶことができなかった。対抗部隊(opposing force)に近接しているため、会戦グループ(battlegroup)からの補給はしばしば現実的ではなかったため、この能力は非常に重要であった。歴史的に、分散した戦闘チームの兵站補強には前例がある。過去には荷役動物が物資の運搬に用いられた。連合軍と日本軍はビルマ戦役中に大量のラバ(mules)を使用し、オーストラリア特殊部隊はアフガニスタンでラバ(mules)を運用した[99]。しかし、ロボット・システムは荷役動物が提供する利点とは異なる優位性を提供し、両者は互換性がない。無人システム(uncrewed system)の特に大きな利点は、数日間所定の場所に保管しておき、静かに作動可能な状態を維持できることである。
無人航空システム(uncrewed aerial systems)は乗車要素部隊の位置特定に優れている。演習前に十分な訓練を受けた兵士が使用した場合、無人航空システム(uncrewed aerial systems)は直ちに有効であることが証明された。これらのシステムは歩兵の発見に苦労したが、車両が発するより強力な熱および視覚的特徴を頻繁に検出することができた。これらが特定されると、「撹乱部隊(disrupt force)」は対装甲車待ち伏せ攻撃または砲撃でこれらをターゲットとした。この部隊は少なくとも14台の対抗部隊の車両(opposing vehicles)を破壊し、わずかな損害しか被らなかったため、支援のない装甲の要素部隊に対して不釣り合いな効果(disproportionate effect)を示した[100]。対抗部隊(opposing force)の高価な装甲車両とその乗員にとって、少数の損害といくらかの弾薬は非常に有利な取引条件だった。対抗部隊(opposing force)は時間の経過とともにその地域で軽歩兵部隊が活動していると推測したが、隠れ家やルートを妨害しているチームの位置を絞り込むのに苦労した。したがって、この演習は歩兵と装甲化部隊の統合の重要性と、分散した歩兵(dispersed infantry)の位置を特定してターゲティングすることの難しさを示した。
非常に短距離のメッシュ・ネットワークは、「撹乱部隊(disrupt force)」には効果がない。チームが携行するATAKは、「撹乱部隊(disrupt force)」が使用する市販の無線機の通信範囲が限られていたため、接続を維持するのに苦労した。チームが広範囲に分散していたため、機器は位置データやメッセージを交換できず、機器は実験室だけでなく、要求の厳しい現場部隊でテストする必要があることを実証した。比較的開けた地形でも、メッシュ・ネットワークは非常に短い通信範囲のためにしばしば機能しなかったが、ATAKの価値は証明も反証もされていなかった。この演習は、使用された小型無線機では、この役割を担う戦闘チームには通信範囲が不十分であることを示したに過ぎない。
陸軍チームは、コンセプトや技術のテストにおいて、ある程度の失敗を受け入れる必要がある。上記の例が示すように、アイデアがうまくいかなくても、実験によって有用な観察結果が得られることがある。オーストラリア陸軍は任務達成を非常に重視しているため、この認識は一部の人にとって受け入れがたいものだった。しかし、技術面での課題は貴重な教訓を生み出し、次回の演習「タリスマン・セイバー2021」における改善点を明確にした。
技術への慣れ – タリスマン・セイバー演習
タリスマン・セイバー演習における「撹乱部隊(disrupt force)」の任務は、戦闘員会戦グループ(Battlegroup Warfighter)演習の任務と類似していた。この部隊も、3個小銃小隊、偵察班、そして狙撃チームで構成されていた。彼らは目標の偵察と対抗部隊(opposing force)のルートの監視のため、縦深空中機動作戦によって投入された。任務は、他の戦闘チームの利益のためにルートと重要地点を発見・確保することに、これまで以上に重点が置かれ、目標へ突撃する(assault)迅速な誘導も含まれていた。最後に、スリム(Slim)の「ロードブロック(roadblock)」を彷彿とさせる戦術として、「撹乱部隊(disrupt force)」は増援部隊と撤退ルートを待ち伏せし、対抗部隊(opposing force)が会戦グループ(battlegroup)に向かって前進した後、背後の「門を閉ざす(shutting the gate)」ことで撤退を阻止した[101]。
タリスマン・セイバー演習から学んだ教訓
無人システム(uncrewed system)の有効性は、使用機会の増加と訓練の増加によって向上した。演習の合間に訓練が継続されるにつれ、タリスマン・セイバー演習では、「撹乱部隊(disrupt force)」は起伏の多い地形で無人地上車両をより効果的に運用することができた。指揮官は無人地上・航空システムの運用をより深く理解し、その使用方法を視覚的にイメージすることができた。訓練期間を通じてチームが自然に有効性を高めたことは驚くべきことではないが、「撹乱部隊(disrupt force)」のメンバーの意識の変化は特に顕著であった。具体的には、無人システム(uncrewed system)を用いた作戦は、大胆で斬新なものではなく、もはや当たり前のこととして受け入れられていた。この変化は、米海兵隊の経験と一致しており、無人地上車両を受け入れたチームは、車両に抵抗したり、負担と見なしたりしたチームよりも多くの利益を得た[102]。技術の受容に加えて、下級兵士たちは敵を「狩る(hunting)」ことについて熱心に語り始め、時間と労力をかけて培われた軽歩兵の精神を体現した。
「撹乱部隊(disrupt force)」は、他の戦闘チームによる決定的な機動(decisive manoeuvre)のための条件を確実に設定した。タリスマン・セイバー演習では、「撹乱部隊(disrupt force)」は戦闘員演習(Exercise Warfighter)よりも一貫して目標周辺の条件を設定した。これは訓練の強化によるものと考えられ、「撹乱部隊(disrupt force)」の戦術的価値が高まった。この部隊は2回にわたり、着陸地帯から都市目標までパトロールを行い、偵察を行い、戦闘チームによる突撃(combat team assaults)のための条件設定に成功した。これには、米陸軍および米海兵隊の戦闘チームの着陸地帯と経路を確保し、「撹乱部隊(disrupt force)」が選択した陣地へ誘導することが含まれていた。突撃する戦闘チーム(assaulting combat team)が目標に到達すると、対抗部隊(opposing force)は偵察を受け孤立し、撤退や増援を行うことができなかった。これらの大きな戦術的優位性により、目標の迅速かつ効果的な掃討が可能になった。これらの任務は、オーストラリア国防軍(ADF)と紛争で緊密に協力する可能性のある同盟の要素部隊を含む、他の要素部隊が決定的な機動(decisive manoeuvre)を行うための条件設定における「撹乱部隊(disrupt force)」の能力を浮き彫りにした。
戦闘チームを目標地点まで誘導するのは偵察任務として一般的であるが、「撹乱部隊(disrupt force)」はそれ以上の機能も担っていた。前方に小部隊司令部を設置し、突撃(assault)のための計画策定を主導した。また、対抗部隊(opposing force)を撹乱し、目標を隔離し、単に攻撃地点を特定するだけでなく、確保するのに十分な戦闘力を有していた。これらの任務は、無人プラットフォームによって強化された、よく訓練された「撹乱部隊(disrupt force)」の有用性を浮き彫りにした。
攪乱部隊(Disrupt force)の進化 ― 2022年に向けた新たな戦力構造
2022年、オーストラリア王立連隊第1大隊(1 RAR)の「支援中隊(Support Company)」が「撹乱部隊(disrupt force)」の開発を担当した。支援中隊は、狙撃兵、偵察兵、迫撃砲、対装甲兵、通信兵などの専門歩兵部隊を、歩兵大隊の戦闘チームおよび会戦グループ(battlegroup)司令部に提供する。通常、これらの専門部隊は、2021年に「撹乱部隊(disrupt force)」に配属された偵察パトロール、狙撃チーム、対装甲兵班など、小銃中隊を基盤とする戦闘チームに分散配置される。しかし、2022年、支援中隊はタスク編成に基づき、独立した「撹乱部隊(disrupt force)」となった。この変更の目的は、小銃小隊を持たずに多数の専門チームが活動した場合の効果を検証することであった。この構成は、ケンプトの「霧の散兵戦(skirmishing mist)」のコンセプト(専門セルが広範囲に分散配置された)に類似しており、現場でこのアイデアを検証する機会を提供した[103]。
この新たな部隊構造は、オーストラリア王立連隊第1大隊(1 RAR)が「撹乱部隊(disrupt force)」の有用性をより徹底的に検証することを可能にした一方で、他の戦闘チームが利用可能な歩兵アセットの減少という必然的な結果をもたらした。現在、オーストラリア歩兵大隊は、3個小銃中隊、1個支援中隊、そして1個戦闘支援中隊のみを擁している。その専門アセットを「撹乱部隊(disrupt force)」に集中させることで、会戦グループ(battlegroup)の残りの部隊の火力と戦術的選択肢は減少する。したがって、「撹乱部隊(disrupt force)」が利用可能な戦闘力と他の戦闘チームが利用可能な戦闘力の間には、直接的なトレードオフが存在する。そのため、これらの戦闘チームが任務を達成できる環境を整える責任は、「撹乱部隊(disrupt force)」に課せられた。
現在支援中隊に所属する兵士や将校の中には、2021年の「撹乱部隊(disrupt force)」に参加していた者もいる。彼らの経験は教訓を活かすだけでなく、部隊の組織化と闘いの方法に関する基本的な前提を検証する機会にもなった。支援中隊はミストを形成するための技能や装備を有していない[104]。しかし、既存のチームを組み合わせることで、偵察、打撃、指揮、支援といった、「霧の散兵戦(skirmishing mist)」のコンセプトの一部であるセルを編成することができる。現場では、中隊はこれらのセルに再編成された。名称の変更は些細なことのように思えるかもしれないが(チームは以前は「狙撃分隊(sniper quad)」や「迫撃砲班(mortar section)」と呼ばれていた)、チームが重点を置くべき効果を強調するのに役立った。例えば、「打撃(strike)」は機能であり、装備品や部隊組織上の位置を指すものではない。この変更はまた、兵舎の編成に関わらず、必要な兵士からチームを編成できることを強調した。
支援中隊は、次のチームで構成される「撹乱部隊(disrupt force)」を結成した。
- 戦闘チーム司令部と統合火力チームの隊員によって最上位の指揮系統が編成された。その後、既存の各小隊本部は、偵察戦闘や火力調整といった特定のタスクに集中するために、追加の指揮セルを編成した。これらの下位の指揮セルは、戦闘チーム司令部が破壊されたり通信が途絶えたりした場合には、戦闘チームの指揮権を引き継ぐことも可能であった。
- 「打撃セル(strike cells)」は、4名の対装甲分遣隊と、ほとんどの場合、2名の狙撃兵または迫撃砲射撃管制官で構成されていた。この混合部隊編成により、チームは敵車両や下車した兵士を遠距離から脅かすことができた。ケンプト(Kempt)の「霧の散兵戦(skirmishing mist)」のコンセプトは「打撃(strike)」を定義するものではないが、攻撃支援、直接射撃兵器、無人戦闘航空機など、物理的な攻撃の例を示している[105]。したがって、「打撃セル(strike cells)」は敵部隊を直接攻撃するために組織され、訓練され、装備されていた。
- 偵察セル(reconnaissance cells)は、地形や対抗部隊(opposing force)を偵察する偵察兵で構成されていた。通信を維持するために、通信資格を持つ兵士がこれらのチームに加わることもあった。
- 他の部隊からの報告によると、迫撃砲班は敵陣地へ高性能爆薬を発射し、圧力下にある小規模チームの撤退を支援することができた。将来的には、これらのチームが徘徊型弾薬や武装無人航空システム(armed uncrewed aerial systems)を配備し、より汎用的な「攻撃支援」セルとなることが想定されていた。
- 戦闘後方支援(Combat Service Support)チームはより大きな物資を保有し、野外でチームに補給を行っていた。
- 支援中隊は先駆者とサイバー電磁活動部隊なしには「霧の散兵戦(skirmishing mist)」を完全に生成することはできなかったものの、それでも十分に類似した部隊構造を構築することは可能だった。この再編により、多数の小規模な専門セル(specialist cells)が、従来は戦術行動のために特定の場所に集中する傾向があった小隊では達成できなかったより広い範囲に効果を発揮することが可能になった。また、この変更により、下級指揮官は担当地域内で迅速に行動するための十分な行動の自由を得た。小規模チームが個別の任務を遂行する一方で、小隊と戦闘チーム司令部は戦闘の進行に合わせてより大規模な効果の調整に集中することができた。2022年の「撹乱部隊(disrupt force)」戦闘序列(ORBAT)を図1に示す。
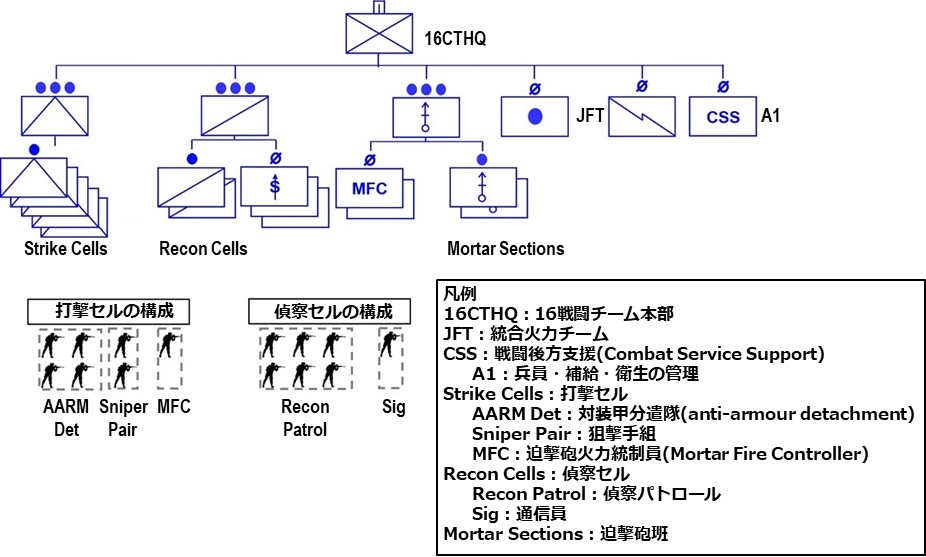
図 1: 2022 年 5 月の 「シー・エクスプローラー演習」 の India Six 戦闘序列。 出典: 著者作成。 |
沿岸環境における撹乱部隊(disrupt force) – シー・エクスプローラー2022演習
2022年の最初の演習「シー・エクスプローラー演習」では、オーストラリア海軍のアデレード巡洋艦(HMAS Adelaide)から会戦グループ(battlegroup)が上陸した。オーストラリアのドクトリンに従い、これは防御の堅固な海岸への敵対的な上陸ではなく、対抗部隊(opposing force)の戦闘力が不足しているか不在の場合の駐留を想定したものだった。この演習は2023年の防衛戦略見直し(DSR)(沿岸機動演習)前に実施されたが、得られた教訓は沿岸機動に最適化されたオーストラリア陸軍にとって依然として重要である。
水陸両用作戦を専門とするオーストラリア王立連隊第2大隊(2 RAR)の統合上陸前部隊と、いくつかの難易度の高い訓練を行うことが合意された。「撹乱部隊(disrupt force)」は地上への空中機動作戦を実施し、分散する。その後、統合上陸前部隊は小型ボートで上陸し、地域への侵入を目指す。この演習では、各部隊が相手の位置を特定しながら、いかに探知されずに行動できるかが試される。
「撹乱部隊(disrupt force)」は、特定の脅威と地形に「霧の散兵戦(skirmishing mist)」のコンセプトを適用するために活動した。部隊はCH-47チヌークで戦闘空間に移動し、その後、各チームに割り当てられた担当地域に分散した。下の画像は、アデレード巡洋艦(HMAS Adelaide)の甲板からCH-47チヌークに搭乗した兵士と全地形対応車が進入する様子を示している。

インディア・シックスがSEA EXPLORER 2022演習で実施した空中機動作戦の一環として、全地形対応車2台が持ち上げられた。 出典:国防画像ギャラリー[106] |
「シー・エクスプローラー」演習から学んだ教訓
沿岸環境では、下車した要素部隊を見つけるのは非常に困難である。「撹乱部隊(disrupt force)」と統合上陸前部隊はどちらも相手を見つけるのに苦労した。密生した植生の中で活動し、発見されることを避けようとしていたため、2つの部隊はめったにお互いを発見できなかった[107]。予想通り、「撹乱部隊(disrupt force)」は、以前の演習で遭遇した装甲化部隊よりも下車歩兵チームを見つけるのが困難だと感じた。これらの結果は、歩兵は移動していないときに無人航空システム(uncrewed aerial systems)から効果的に身を隠すことができるという以前の観察を裏付けた。同様に、強力なセンサーを搭載した主要なオーストラリア陸軍プラットフォームは、特定の捜索場所を提供されていたにもかかわらず、「撹乱部隊(disrupt force)」を検出できなかった。沿岸での作戦では、見られたくない歩兵を検出することの困難さ自体を考慮しなければならない。
責任範囲を小規模なチームに割り当てることは効果的である。新しい戦闘序列(ORBAT)の導入は大きな可能性を示した。特に、専門チームを広範囲に分散させることで、下級指揮官が主導性を発揮し、敵を撹乱できることの利点が実証された。
時には、2つのチームが異なる任務を担い、必要に応じて直接対面で連携するよう指示され、同じ地域に配属されることもあった。また、機会を捉えるために境界を越えて迅速に連携するよう指示されたチームもあった。チーム間の直接的な連携により、無線通信への依存度が下がり、電子戦アセットによって位置が特定される可能性も低下した。ある例では、偵察セル(reconnaissance cell)が対抗部隊のパトロール隊(opposing patrol)を検知すると、近くの打撃チームと即座に連携して待ち伏せ攻撃を行った。この行動は迅速かつ最下層で調整されており、上位司令部への無線通信を必要としなかった。ミッション・コマンド(mission command)の環境において事前に期待値を設定することで、小規模なチームでも機会を捉える力を得ることができた。
最後の演習は対照的な地形で装甲化会戦グループ(armoured battlegroup)で行われ、新たな観察を引き出すことになる。
装甲車との統合 – 第3旅団演習戦闘員
最終演習では、「撹乱部隊(disrupt force)」が第2騎兵連隊を基盤とするイーグル会戦グループ(Battlegroup Eagle)と統合された。この演習では、「撹乱部隊(disrupt force)」が対抗部隊(opposing force)として行動した。対抗部隊は、オーストラリア陸軍第3大隊(3 RAR)を基盤とする機械化したカピョン会戦グループの(Battlegroup Kapyong)が訓練部隊として編成された。
これまでの演習では「撹乱部隊(disrupt force)」が攻勢作戦に重点を置いていたが、今回の演習では機械化部隊の前進に対抗し、装甲化したイーグル会戦グループ(Battlegroup Eagle)の専門歩兵を投入する機会が与えられた。理想的には、「撹乱部隊(disrupt force)」はカピョン会戦グループ(Battlegroup Kapyong)の訓練区域を横断して都市目標に向かう進撃を遅らせ、消耗させることが期待された。下の画像は、M113装甲兵員輸送車とM1A1エイブラムス主力戦車を含む、カピョン会戦グループ(Battlegroup Kapyong)が使用可能な戦闘力を示している。

カピョン会戦グループ(Battlegroup Kapyong)は第3旅団戦闘員として集結し、多数の装甲車両と歩兵が撹乱部隊(disrupt force)に挑むことになった。 出典:国防イメージギャラリー[108] |
「撹乱部隊(disrupt force)」の指揮チームは、地形が非常に開けているため、独立して行動する小規模チームは断片的に壊滅し、装甲化部隊の機動性に大きな優位性をもたらすと評価した。したがって、機械化部隊の進撃を遅らせる計画には、より集権的統制(centralised control)が必要であった。この計画は、「撹乱部隊(disrupt force)」内のチームの行動の自由を重視するという従来の方針と矛盾しているように見えるかもしれない。しかし、この決定は、すべての会戦グループ(battlegroup)が任務、脅威、そして地形を適切に考慮した方法で能力を展開しなければならないという事実を反映している。この演習の場合、「撹乱部隊(disrupt force)」の集権的統制(centralised control)は正当化された。
距離が長かったため、「撹乱部隊(disrupt force)」はブッシュマスター防護機動車両で演習に参加した。車両の機動性と防護性は確かに提供された優位性だったが、演習の後半では役に立たなくなる。
カピョン会戦グループ(Battlegroup Kapyong)が前進するにつれ、「撹乱部隊(disrupt force)」は全地形対応車に搭乗した狙撃兵を広範に活用した。通常友軍より20キロ前方で活動するこれらの狙撃兵は、対抗部隊(opposing force)の動きや活動を記録し、司令部や主力戦車などの主要アセットへの砲撃を要請し、後に狙撃銃で敵と直接交戦することができた。次に、主力より10キロ前方では、偵察セル(reconnaissance cells)がイーグル会戦グループ(Battlegroup Eagle)に前進の情報を伝達し、計画策定を支援した。「撹乱部隊(disrupt force)」は作戦範囲が奥深く、前進する装甲車両を観察し、把握し、撹乱する時間があった。カピョン会戦グループ(Battlegroup Kapyong)が「撹乱部隊(disrupt force)」の主力に近づくにつれ、打撃チームの対装甲兵器は、小川の横断部に設置された鉄条網障害物への迫撃砲火力や砲兵火力と同期した。この状況は、演習の後半での経験と対照的である。その際には、装甲化の要素部隊が近かったため、「撹乱部隊(disrupt force)」は彼らの行動を観察し妨害する時間がほとんどなく、その結果、戦闘力がすぐに投入された。
演習が進むにつれ、「撹乱部隊(disrupt force)」には騎兵部隊、騎馬偵察部隊、軽電子戦チーム、工兵、そして追加の歩兵小隊など、様々な部隊が加わった。これらの能力は戦術的選択肢を拡げたが、「撹乱部隊(disrupt force)」は戦闘チームというよりは「会戦グループ(battlegroup)マイナス」に近いものとなった。この状況は計画策定の取組みの複雑さを増し、会戦グループ(battlegroup)の「撹乱部隊(disrupt force)」への依存度を高めた。
これらの活動と並行して、「撹乱部隊(disrupt force)」に基盤技術を提供したオーストラリア陸軍戦闘応用研究所は、野外での写真測量法の開発において重要なマイルストーンを達成した。写真測量法とは、無人航空機システム(uncrewed aerial system)を用いて多数の2次元写真を撮影し、それを処理して3次元デジタル地形モデルを作成するプロセスである。下の画像は、主要目標について作成されたモデルの例であり、ATAKデバイスを通じて指揮官に提供され、計画策定の支援に役立てられている。

現場の計画担当者に生成され提供された目標の 3 次元モデルのスクリーン・ショット。 出典: 著者作成。 |
第3旅団戦闘員演習から得られた教訓
「撹乱部隊(disrupt force)」は集中した戦闘力に対して脆弱である。演習中、「撹乱部隊(disrupt force)」は比較的開けた地形において、機械化・装甲化部隊の急速な前進に二度圧倒された。いくつかのチームは壊滅するか、迂回されて不安定な状況に置かれた。これは、敵対者につけ込まれる可能性のある戦術レベルの脆弱性を示している。逆に、演習初期における小規模チームによる行動は、主力部隊からより離れた植生に覆われた地形において効果的であった。これらの結果は、チームが「撹乱部隊(disrupt force)」が複雑な地形に身を潜め、任意のタイミングで局所的な優位性を獲得し、対抗部隊(opposing force)を粉砕し、数時間ではなく数日かけて会戦グループ(battlegroup)の状況を整備できる場合に最も効果を発揮することを示している。この観察は、ケンプト(Kempt)の「霧の散兵戦(skirmishing mist)」のコンセプトで概説された原則を反映している[109]。
分散した歩兵部隊はリスクを負い、長期撤退に備えた計画を立てなければならない。ある程度の効果はあったものの、「撹乱部隊(disrupt force)」の要素部隊は壊滅の大きなリスクにさらされていた。狙撃チームと偵察セル(reconnaissance cells)は、はるかに強力な対抗部隊の要素(opposing elements)に孤立、包囲、あるいは迂回されることもあった。こうしたリスクは、部隊が「撹乱部隊(disrupt force)」の残りのチームと合流する計画によって、時には数日後に合流することでいくらか軽減された。演習のハイライトの一つは、狙撃兵2名が朝の報告で、対抗部隊の戦車(opposing tanks)に包囲され、長時間動けないと説明したことだ。別の例では、「撹乱部隊(disrupt force)」の大半が撤退する中、偵察部隊が対抗部隊の砲兵(opposing artillery)の位置を特定するために残っていた。これらの状況は、チームが包囲または迂回される可能性に対処するための緊急時対応計画(contingency plans)を策定し、長期撤退中に自給自足できるよう小型車両に十分な物資を搭載しておく必要があることを示した。戦争の残酷な計算により、「撹乱部隊(disrupt force)」は、その部隊が長距離火力プラットフォームを見つけて破壊できるのであれば(この場合、砲兵が検出されなかったとしても)、偵察セル(reconnaissance cell)に対する非常に高いレベルのリスク(その損失を含む)を受け入れる覚悟ができていたことが分かった。
「撹乱部隊(disrupt force)」は攻撃支援と連携することで、はるかに効果的になる。以前の演習では、「撹乱部隊(disrupt force)」による攻撃支援(迫撃砲や砲兵など)の活用が攻勢作戦において大きな効果を発揮した。旅団戦闘員演習(Brigade Warfighter exercise)では、防御作戦においてもこれが不可欠であることが確認された。攻撃支援部隊が撤退を支援するための射撃を行えるようにすることで、チームが孤立するリスクをある程度軽減出来る。この戦術により、「撹乱部隊(disrupt force)」は不必要な犠牲を払うことなく、何度も成果を上げた。
支援射撃の必要性は、「撹乱部隊(disrupt force)」の低いシグネチャと関連している。小規模な歩兵チームは身を隠すために多大な労力を費やすため、その地域は相手にとって戦術的な「隙間(gap)」であり、部隊が迅速に前進できる抵抗のないルート(a route free of opposition)であるように見える可能性がある。演習では、「撹乱部隊(disrupt force)」の相手が相当の戦闘力でこの認識された「隙間(gap)」に進撃したため、いくつかの「打撃セル(strike cells)」が壊滅した。「撹乱部隊(disrupt force)」のチームを相手の装甲車に非常に近い距離で安全に撤退させるには、3回の同時射撃任務が必要だった。これらの事例は、分散した歩兵(dispersed infantry)がより大きな戦闘力に直面した場合、攻撃支援が重要な成功要因であることを明確に示していた。この点で、徘徊型弾薬は近い将来、迫撃砲や砲兵を補完する可能性がある。
「撹乱部隊(disrupt force)」は、専門の支援者を効果的に配置した部隊であり、同じタスクを担う標準的な戦闘チームよりも効果的である。「撹乱部隊(disrupt force)」は本質的に柔軟性が高いため、2022年の演習中、他の部隊から随時投入された追加部隊にも容易に適応した。これらの追加部隊には、専門の歩兵の要素部隊と非歩兵の要素部隊(追加の無人システム(uncrewed system)やオーストラリア空軍の飛行場調査チームを含む)が含まれていた。これらの追加能力により、火力の増強と対抗部隊(opposing force)の発見・攻撃の選択肢の拡大が実現し、「撹乱部隊(disrupt force)」は2021年よりも優れた成果を達成した。
専門の歩兵チームと多くの非歩兵の配属には利点があるが、指揮・統制が複雑になるという欠点がある。「霧の散兵戦(skirmishing mist)」のコンセプトでは、12人から20人からなる多くのチームが単一の会戦グループ(battlegroup)司令部に報告する必要がある[110]。この構造は、戦闘チームや小隊本部などの既存の階層を省略する。実際には、「撹乱部隊(disrupt force)」の戦闘序列(ORBAT)の多様性により、小隊本部が存在しないときはいつでも、特により異なる要素が部隊に配属されている場合、計画策定と実行ははるかに困難になった。非常に多くの効果が利用できるということは、それらを調整するために従属本部が必要であることを意味していた。たとえば、1つの小隊本部がすべての狙撃チーム、偵察セル、監視要素、電子戦分遣隊を調整した。明らかに、分散した歩兵(dispersed infantry)は、多くのチームが単一の司令部に報告するよりも、多層の指揮・統制から恩恵を受ける。
大型車両は「撹乱部隊(disrupt force)」にとって不利となる可能性がある。最後に、ブッシュマスターのような車両の運用について検討する価値がある。これらの車両は、隠蔽と撤退を困難にするため、一般的に「撹乱部隊(disrupt force)」にとって不利であった。この演習は、大型プラットフォームではなく、軽量で隠蔽性の高い小型支援車両の重要性を示した。迂回したチームが軽歩兵として活動し、大型車両のサイズ、騒音、熱特性を考慮する必要がなければ、撤退は容易だったかもしれない。この点において、車両の隠蔽の難しさは、優れた機動性と防弾性能を得るための適切な取引ではなかった。これらの知見は、現在、全地形対応車両と無人地上車両のアドホックな混合によって補われている能力ギャップを解消するために、下車部隊を支援する小型車両の運用に示唆を与えるであろう[111]。
全体として、この演習は、装甲化会戦グループ(armoured battlegroup)に専門歩兵が存在することが敵に致命的なジレンマを課すことを実証した。したがって、これはオーストラリア陸軍がさらに検討すべき戦力増強策である。
2021~2022年の攪乱部隊(Disrupt force)で学んだ教訓のまとめ
2021年から2022年にかけての「撹乱部隊(disrupt force)」のコンセプトと戦術の進化からわかるように、実験は反復的で探索的なプロセスであり、成功への直線的な道筋ではなかった。しかしながら、この2年間の現場経験から、以下のテーマを導き出すことが出来る。
- すべてのプラットフォームと同様に、無人システム(uncrewed system)でも、ユーザーに最大限の機能を提供するには時間と訓練が必要である。
- 小型支援車両は軽歩兵の耐久力を高め、非常に低いシグネチャを維持しながら補給なしでより長い期間活動することを可能にする。
- 無人航空システム(uncrewed aerial systems)は状況認識を強化し、軍隊が安価な兵器を高価な対抗部隊の地上アセット(opposing land assets)と取引できるようにすることで不均衡な効果をサポートする。
- 訓練された「撹乱部隊(disrupt force)」は、オーストラリアの同盟国を含む他の戦闘チームによる決定的な機動(decisive manoeuvre)の条件を確実に設定することで、会戦グループ(battlegroup)のテンポを向上させることが出来る。
- 責任分野を小規模のチームに割り当て、チームが緊密に連携して主導性を発揮できるようにすると効果的である。
- 専門歩兵と装甲化部隊の統合は、敵に致命的なジレンマを課す。逆に、「撹乱部隊(disrupt force)」は装甲化部隊の前進のような集中戦闘力に対して脆弱であり続ける。
- 「撹乱部隊(disrupt force)」は、複雑な地形で活動し、攻撃的な支援を受けている場合に最も強力になる。
実験はオーストラリア陸軍の作戦部隊の枠内で行われ、次の節ではその枠内で遭遇した課題について説明する。
実験における文化的摩擦点
実験において最も頻繁に摩擦が生じた点は、変化への抵抗だった。そのため、2022年の新たなアプローチでは、参加者全員に次のような発言を避けるよう依頼した。
- これが我々がいつもやってきたやり方である。
- それが我々のドクトリンであるので、我々はこのように行う。
- これは決してうまくいかない。
- これは個人的には役に立たない。
- これは完璧ではない(アイデアは放棄する必要があることを意味する)。
軍種は国防の価値であるが、兵士は追加のタスクを自然に嫌うことがある。指揮官は食料と水を満載した無人地上車両の耐久性を高く評価する可能性が高いが、オペレーターにとっては単なる仕事の増加に見えるかもしれない。夜間に困難な地形で車両を準備し操縦することは、新技術の利点を十分に理解できない兵士にとっては負担に感じるかもしれない。実験の状況では、「撹乱部隊(disrupt force)」を支援する組織は、十分な背景情報がないまま、若い兵士からプラットフォームに関する否定的なフィードバックを聞くことがあった。若い兵士の貢献を軽視することなく、オーストラリア陸軍は、異なる役割が新しい技術やアプローチに対して異なる視点をもたらすことを認識する必要がある[112]。兵士にはシステムの使いやすさについて質問されるべきであるが、指揮官にはそれがもたらす効果について質問されるべきである。
人間と機械のチーム文化の創出とリスクの理解
オーストラリア陸軍は、無人システム(uncrewed system)の導入において文化的な課題に直面するだろう。兵士たちは当初、半自律走行車や少数の兵士のみが同行する無人地上車両を負傷者搬送に使用することに懸念を示していた。これは、厳重な警備の下、担架で負傷者を運ぶチームとは対照的に、負傷者を遺棄する非倫理的な行為と見なされていた。しかし、作戦環境によっては、無人プラットフォームが負傷者にとって最も生存率の高い手段となる場合もある。これは特に、他の友軍の要素部隊よりはるかに前方で活動している場合に当てはまる。負傷者搬送のたびに、部隊全体の位置が明らかになるリスクがあるからだ。「撹乱部隊(disrupt force)」の兵士たちは、現場でこの新しい負傷者搬送方法を試し、チームがいかに迅速に負傷者を搬送できるかを目の当たりにした後、この新しい負傷者搬送方法をより受け入れやすくなった。米海兵隊による同様の実験では、無人地上車両を有用なアセットおよびツールと見なすチームは、任務中の労力とフラストレーションを軽減し、より大きな実用性を獲得することが実証されている[113]。明らかに、無人地上車両がチームからどのように見られるかは重要であり、指揮官によって管理されなければならない。
敵対者に「撹乱部隊(disrupt force)」の存在を悟られないように、救急車やヘリコプターで負傷者を避難させることは困難である。指揮官は、負傷者の避難と部隊全体の隠蔽という難しい選択に直面するだろう。どのような状況であれば避難が正当化されるかを検討するために、事前にチームで合意したシナリオをウォーゲームで検討しておくことが役立つかもしれない。もちろん、沿岸地域への部隊の初期展開に関わる既存の要素部隊においても、同様のリスクは既に認識されている。オーストラリア陸軍は、国民を守ることの意味を再考する必要がある。これは、即時の避難や有人プラットフォーム(crewed platforms)による避難を意味するものではないかもしれない。
技術的優位性の想定
文化的障害に関する最後の点として、「撹乱部隊(disrupt force)」は、西側諸国の軍隊が敵対者のプラットフォームと戦術を常に打ち破るという危険な思い込みに繰り返し遭遇した。筆者は、敵対者の無人システム(uncrewed system)の能力を過小評価する議論を直接目にしてきた。おそらく、これらのプラットフォームにあまり触れたことがないため、「新興技術」であるという誤った認識につながっているのだろう。オーストラリア陸軍将校の中には、無人システム(uncrewed system)が外国軍で広く普及し、致死性が高く、定着していることを知らない者もいる。したがって、防衛戦略見直し(DSR)に記載されているように完璧さを追求し、能力を統合するのに何年もかかるのであれば、オーストラリア陸軍は技術的優位性を想定することはできない[114]。次の節では、オーストラリア陸軍とオーストラリア国防軍(ADF)が能力の採用を加速するために調整を行うことができる組織的領域について検討する。
実験における組織的な摩擦点
実験から得られた教訓へのアクセス
オブザーバーの中には、「撹乱部隊(disrupt force)」のシステムと戦術は以前にも試みられており、オーストラリア陸軍の一部では十分に理解されているという意見もあった。ある経験豊富な将校が、「コンセプトは興味深いが、「新しいものではない」」とコメントしたことは、このことを要約していると言えるだろう。用兵技法(warfighting techniques)に全く新しいものはほとんどないため、この発言には一理あるが、同時に組織の改善の余地があることも浮き彫りにした。情報へのアクセスが制限されているため、「撹乱部隊(disrupt force)」が過去の成果を基に構築していくことは困難であり、時には不可能だった。協力と実験結果の共有は、オーストラリア国防軍(ADF)が改善の余地があり、また改善すべき分野である。
他の部隊や本部への報告書や教訓の要請はしばしば返答がなかったり承認されなかったりしたが、国際的なパートナーは非常に反応がよい傾向にあった。試験や実験に関する情報のこのサイロ化は、時間、資源、人員の無駄遣いのリスクがある。結果を確認するための意図的な複製ではなく、意図しない作業の重複を生み出す。実際には、情報共有は体系的な情報交換ではなく、個人的な関係や偶然の出会いに頼ることが多かった[115]。部隊が取り組んでいるコンセプトを共有したり、協力できる他者を見つけたりするための適切なメカニズムはなかった。2024年に、国防科学技術グループは国防研究登録簿の照合を開始した。この作業は、国防における試験、実験、研究を実施しているチームからの入力によって、協力を支援し、重複を減らし、効率を向上させる集中型プラットフォームの基盤となる可能性がある。
無人システム(uncrewed system)に関する規制と政策
オーストラリア国防軍(ADF)では、無人航空システム(uncrewed aerial systems)の訓練での使用が厳しく制限されており、これが戦術の発展に悪影響を及ぼしている。連邦労働安全衛生法との調和と強化を意図した国防航空安全規則によって規制されている[116]。この規則の下では、オーストラリア陸軍のオペレーターは、オペレーターの視界内で、日中に、制限された作戦地域内で、市街地上空ではなく、無人航空システム(uncrewed aerial systems)を飛行させることのみが許可されている[117]。限られた状況でより広範な使用が認められているが、これを合法的に達成する方法を知るために国防航空安全規則について十分な知識を持つ戦闘部隊はほとんどない。部隊は、無人航空システム(uncrewed aerial systems)を使用する際の論理的な次のステップ、例えば防護移動車両や上陸用舟艇からの発進、ペイロードの運搬、オペレーター間のシステムの制御の受け渡しなどを試みることを何度も禁止された。 2022年に実施されたある統合演習では、国防航空安全規則に加えて軍事空域管制が導入されたため、「撹乱部隊(disrupt force)」は24時間のうち6時間しか無人航空システム(uncrewed aerial systems)を飛行させることができなかった。これらの例すべてにおいて、戦術の開発は技術の能力ではなく、国防規則によって制限されていた。
訓練を制限することで、これらの規制は、無人航空システム(uncrewed aerial systems)の援助なしで闘わなければならない、あるいは訓練を受けていない状況で無人航空システムを使用しなければならない指揮官や兵士にリスクを転嫁することになる。オーストラリアの敵対者は、夜間や市街地での作戦行動によって、この訓練不足を利用する可能性がある。2023年以降、防衛航空安全規則に調整が加えられ、無人航空システム(uncrewed aerial systems)を用いたより実践的な訓練が可能となり、使用拡大の権限は適切に指揮官に委譲された。しかし対照的に、一部の欧州諸国は戦争で無人システム(uncrewed system)を日常的に使用しているため、その使用経験がはるかに豊富である。防衛訓練地域は、実際の戦場よりもはるかに効果的にユーザーがリスクを管理し、結果を制御できる環境を作り出す。それは、真の戦闘の摩擦を引き起こす前に、無人航空システム(uncrewed aerial systems)の指揮官やオペレーターに異議を唱える機会を提供する。オーストラリア国防軍(ADF)が実弾射撃訓練を実施し、使用者の初弾が戦闘で発射されないよう配慮しているのと同様に、オーストラリア国防軍(ADF)は訓練において無人航空システム(uncrewed aerial systems)を日常的かつ全面的に活用すべきである。オーストラリア国防軍(ADF)は、無人航空システムを用いた訓練方法を見直すべきであり、無人航空システム(uncrewed aerial systems)が諸兵科連合システムの不可欠な一部となるよう徹底すべきである。
組織のテンポと実験のリソース
実験は部隊の通常のタスクと並行して行われていたため、組織のテンポが速く、資源が限られていたため、「撹乱部隊(disrupt force)」の開発が遅れた。部隊は毎年必要な訓練の義務と人員作業に加えて、実験能力に対する標準操作手順書、安全ケース、技術的リスク評価、リスク管理計画、ユーザー要件も作成した。この作業を担当した人員は、技術や能力に関して深い知識を持っていなかった。同時に、同じ部隊は洪水とCOVID-19に関連する国内作戦、ウクライナ軍を訓練するための国際作戦、カブールからのオーストラリア人避難に部隊を派遣した。これらの作戦は長期的な実験よりも明らかに優先されたが、その累積的な影響で職員の疲労が増大した。大規模演習を「通じて近代化」するという狙いは優れた訓練機会をもたらしたが、その目標に追加の時間が割り当てられていなかった。
戦術と技術の開発には、持続可能な作業量内で達成可能な適切な時間と人員が必要である。実験に十分な資源が投入されない場合、部隊が支援不足を予期して参加を回避し、戦術の停滞につながるという「逆インセンティブ」を生み出すリスクがある。したがって、部隊には戦術と技術の開発という深い作業を行う時間を与える必要がある。第1装甲化連隊(1st Armoured Regiment)をオーストラリア陸軍加速能力開発パスウェイを支援する実戦部隊ではなく実験部隊に指定したことは、非常に有望である。
十分な資源と適切な技術的および規制上の専門知識があれば、第1装甲化連隊は同等の作戦部隊よりも効果的に実験を実施できる立場にある。第1装甲化連隊を支援する人員は、場当たり的な助言ではなく、正式なタスクを負う必要がある。部隊と支援専門家の間には、他の職務と並行して行われる作戦部隊への非公式な支援よりも、慣習的な正式な関係が築かれており、より良い結果を生み出す。以下の節では、部隊が過去の実験を活用できる出発点となるよう、規範的なアプローチではなくコンセプト的なアプローチを採用し、戦闘チーム規模の「撹乱部隊(disrupt force)」のモデルを提案する。
攪乱部隊(Disrupt force)の提案モデル
「敵は通常、小規模な部隊を縦深打撃に投入しており、反撃を受けた場合撤退が困難になる可能性がある」
捕獲された北ベトナムの米国空挺作戦に関する指示パンフレット[118]
提案された役割と運用
本稿では、分散型歩兵戦術(dispersed infantry tactics)の一例として「撹乱部隊(disrupt force)」を提示し、その有用性は戦術的実験において明確に実証された。本稿で「撹乱部隊(disrupt force)」について行った観察の多くは、分散型軽歩兵にも一般的に適用できる可能性があり、これは会戦グループ(battlegroup)の指揮官がさらに検討したい事項である。
戦術的実験の結果、「撹乱部隊(disrupt force)」は会戦グループ(battlegroup)の決定的な機動(decisive manoeuvre)のための条件を整えるのに最も効果的であることが示された。「撹乱部隊(disrupt force)」は偵察・監視、目標の分離と接近経路の特定、対抗部隊のアセット(opposition’s assets)、増援部隊、撤退ルートのターゲティング、指揮・統制の弱体化、移動の自由の否定、そして計画の挫折を通じてこれを実現する。「撹乱部隊(disrupt force)」は統合部隊を支援し、海、陸、空のドメインをまたいだ統合火力を可能にする監視と偵察を提供する。下の画像は、演習「シー・エクスプローラー2022」において、「撹乱部隊(disrupt force)」が会戦グループ(battlegroup)の条件を整えている様子を示している。
各チームは、任務に適した兵士と技能セットのグループから編成され、分散した部隊として広範囲に分散配置され、同期した効果を発揮する。戦闘チーム司令部は、必要に応じて行動を集中的に調整し、決定的な機動(decisive manoeuvre)のための状況を調整する。部隊には、偵察、監視、電子戦、騎兵、工兵などの専門部隊が追加で含まれる場合がある。
「撹乱部隊(disrupt force)」は、理想的には小型の下車支援車両と連携して、下車した状態で最も効果的に機能する。この点を踏まえ、今後10年間の軽歩兵の活用に関する議論には、こうしたアセットを携えて徒歩で移動する部隊も含めるべきである。小型車両を活用することで、「撹乱部隊(disrupt force)」は空中機動作戦を通じてインド太平洋地域への迅速な展開が可能となる。
「撹乱部隊(disrupt force)」は、侵入による攻撃と待ち伏せによる防御を行う。対装甲兵器、ロボット・自律システム、そして攻撃支援を用いて敵のプラットフォームを危険にさらす。部隊は耐久力を高めるため防護装甲を着用せずに活動し、敵がチームの一部を迂回する可能性も想定している。

着陸地点を確保した後、撹乱部隊(disrupt force)のメンバーはオーストラリア陸軍砲兵第4連隊の銃をCH-47チヌークから取り外し、これらの銃は後に会戦グループ(battlegroup)の目標に向けて発砲した。 出典: 著者撮影の写真。 |
「霧の散兵戦(skirmishing mist)」のコンセプトが予測するように、「撹乱部隊(disrupt force)」は「無力化する(neutralise)」や「攪乱させる(disrupt)」といった敵に焦点を当てたタスク動詞を与えられた場合に最も効果を発揮する[119]。「撹乱部隊(disrupt force)」の強みは、その低いシグネチャ、決定的な機動(decisive manoeuvre)の条件を整える下位指揮官の指揮下で広範囲に効果を発揮すること、そしてインド太平洋地域への迅速な展開が可能となることである。一方、この部隊の弱点は、補給・撤退アセットからの孤立、限られた有機的な戦闘力、長距離通信、そして対抗部隊の歩兵(opposing infantry)の攻撃を受けやすいことである。一方、「撹乱部隊(disrupt force)」の陣地は敵にとって空いている「隙間(gap)」に見える可能性があり、敵はその地域に戦闘力を集中させる可能性があり、リスクと機会の両方をもたらす。指揮官は、「撹乱部隊(disrupt force)」にタスクを割り当てる際、そして下位指揮官に任務と意図を明確に伝える際に、これらの要素を考慮しなければならない。
攻勢作戦において、「撹乱部隊(disrupt force)」はヘリコプターを介して沿岸環境に展開し、オーストラリア水陸両用部隊のようなより大規模な要素部隊の目標を偵察することが出来る。これは特殊部隊や統合上陸前部隊の役割に取って代わるものではない。「撹乱部隊(disrupt force)」は会戦グループ(battlegroup)が所有するアセットであり、それらと階層化することも、それらを戦闘空間の奥深くにおける他の任務に集中させることも可能である。「撹乱部隊(disrupt force)」は敵の位置を特定し、増援や撤退ルートを待ち伏せすることで目標を隔離し、敵の予備部隊、兵站車両、指揮・統制拠点を破壊するための火力調整を行うことが出来る。さらに、「撹乱部隊(disrupt force)」は着陸地点とルートを設定し、戦闘チームを突撃地点に誘導することで作戦のテンポを上げることが出来る。これらの行動により、会戦グループ(battlegroup)は弱体化した(または気を散らされた)敵に対して、より迅速に目標に接近することが可能になる。図2は、沿岸環境における攻勢作戦における「撹乱部隊(disrupt force)」の運用のコンセプトを示している。
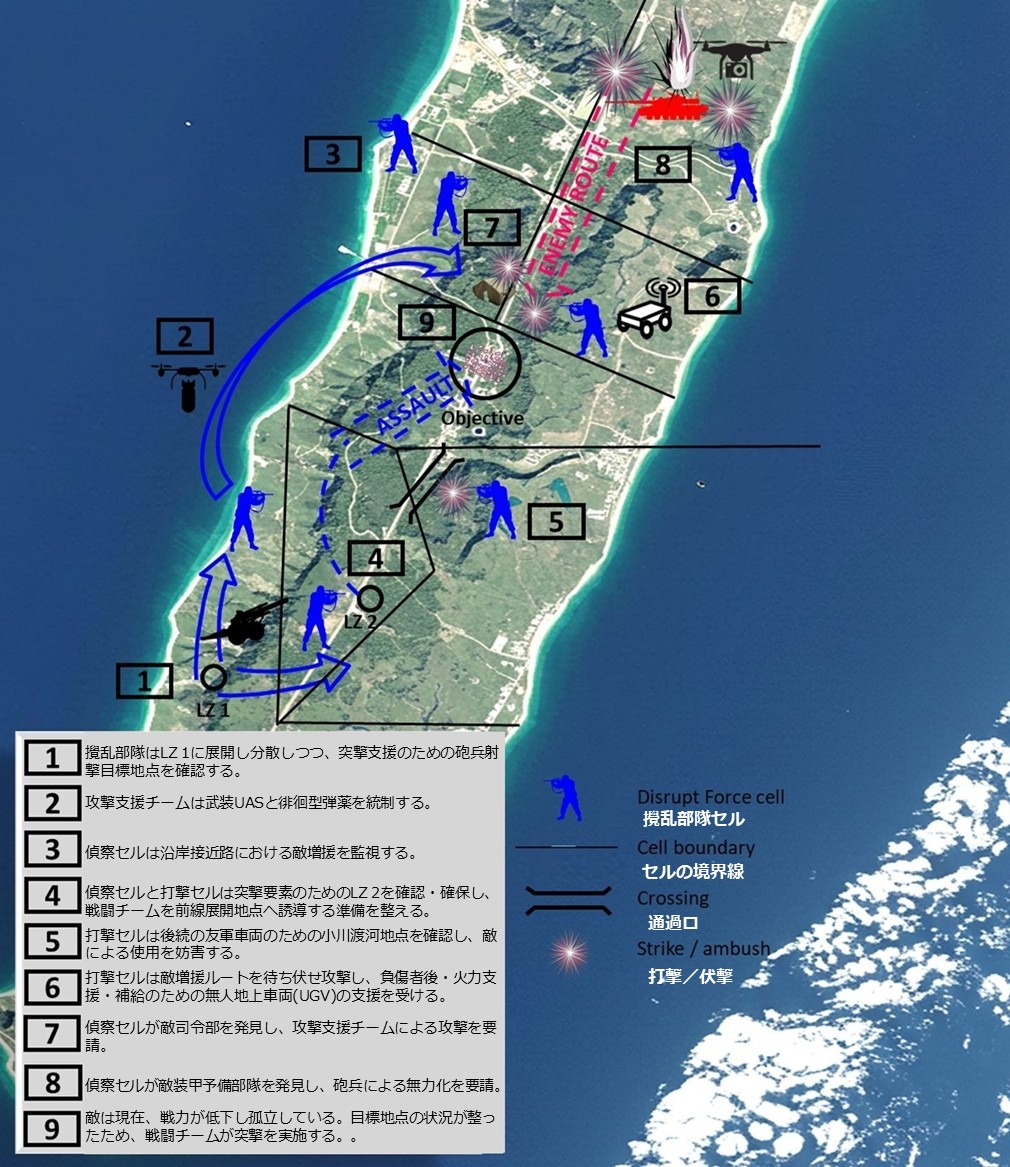
図 2: 攻勢作戦における撹乱部隊(disrupt force)のコンセプト上の運用。 出典: 著者作成。 |
防勢作戦において、「撹乱部隊(disrupt force)」は長距離火力や対空ミサイル・システムといったオーストラリアの重要なプラットフォームを防衛することができる。この部隊は、プラットフォームの局所的な警備ではなく、敵の接近を遅らせ、妨害することでこれを達成する。また、この部隊は、カー(Carr)とフリューリング(Frühling)が述べているように、敵対者を「グレー・ゾーン」から武力紛争へと追い込むためのトリップワイヤーの一部として行動するか(パラッツォ(Palazzo)が主張しているように)、これらの高価値プラットフォームの警備を提供することで、拒否戦略を実行する際にこれらの能力を補完することもできる[120]。最終的には、「撹乱部隊(disrupt force)」による戦術的交戦は、作戦効果の達成において主要な地上アセットを支援することになるだろう。
攪乱部隊(Disrupt force)生成能力の基本的な入力に関する含意
能力への基本的な投入要素とは、「能力の要素または投入要素であり、これらが組み合わさって能力の基盤を形成する」ものであり、例えば人員、集団訓練、産業などが挙げられる[121]。すべての能力はこれらの要素を必要とするため、以下に検討すべきいくつかの分野を概説した。この部隊は既存の歩兵部隊から編成されるため、必要な投入要素の一部は既に整備されている。なぜなら、これらの人員はタスクのために訓練、装備、組織化が可能だからである。
主要システムと組織。「撹乱部隊(disrupt force)」には対装甲車両、偵察システム、通信システムが必要であり、無人システム(uncrewed system)で補強することで、その効果ははるかに高まる。「撹乱部隊(disrupt force)」を編成することを狙った各大隊は、相当数の無人航空システム(uncrewed aerial systems)と、理想的には、有人、無人、あるいはその組み合わせを問わず、何らかの形態の下車型支援車両を必要とする。「撹乱部隊(disrupt force)」は、チームがその役割について訓練を受けている限り、必ずしも恒久的な組織である必要はない。指揮官が他の戦闘チームへの資源配分と「撹乱部隊(disrupt force)」の運用のバランスを取り、後者が決定的な機動(decisive manoeuvre)を行うための条件を整えることができれば、新設の「撹乱部隊(disrupt force)」は比較的迅速に編成出来る。オーストラリア陸軍が上陸用舟艇、長距離火力、対空兵器などの重要な装備を調達するにつれて、「撹乱部隊(disrupt force)」の能力に必要な基本的なインプットは比較的管理しやすいものと思われる。したがって、「撹乱部隊(disrupt force)」は、既に戦闘序列(ORBAT)に配備されている人員とアセットを使用する指揮官にとって、追加の戦術的選択肢となり得る。
訓練分野。無人航空システム(uncrewed aerial systems)および地上車両を用いた訓練には、戦争の最新動向を反映した成熟した訓練および規制の枠組みが必要である。現実的な解決策は、無人システム(uncrewed system)を特別な規制を必要とする新たな能力カテゴリーとしてではなく、車両または兵器として捉えることである。例えば、徘徊型弾薬は、オペレーターからターゲットへ効果を伝達するもう一つの手段に過ぎない。確かに、武装無人システム(armed uncrewed system)は攻撃前に移動する能力など、更なる複雑な問題が存在する。幸いなことに、オーストラリア陸軍は1世紀以上にわたり、致死性システムの運用経験を積んでいる。武装無人システム(armed uncrewed system)の運用に伴う課題は、オーストラリア陸軍全体の力で解決できる範囲にある。
産業界。この「撹乱部隊(disrupt force)」は、太平洋地域におけるパートナーとの連携を深めつつ、オーストラリアの防衛産業を支援する絶好の機会となる。オーストラリア企業は、無人航空システム(uncrewed aerial systems)、対抗手段、無人地上車両などの製品の開発を続けている。オーストラリアのシステムの中には、既に海外の調達先によって調達され、運用されているものもある[122]。オーストラリアの産業界が「撹乱部隊(disrupt force)」に必要な無人システム(uncrewed system)を提供できることはほぼ間違いない。
さらに、太平洋諸国は高価な車両プラットフォームに頼ることなく、その威力を高めようとする可能性がある。「撹乱部隊(disrupt force)」はオーストラリア企業から購入可能なツールを活用し、小規模な太平洋諸国の軍隊にとって不釣り合いな効果(disproportionate effect)を発揮できるスキルセットとシステムを提供する。この状況は、オーストラリアにとって、太平洋諸国の安全保障目標を支援し、オーストラリア国防軍(ADF)との相互運用性を強化しつつ、オーストラリアの製造業者を支援するという、またとない機会となる。
更なる開発の分野
部隊には、戦術と部隊構造の発展に貢献する豊富な機会がある。第一に、歩兵の要素部隊と装甲化の要素部隊は常に相互に連携し、大きな効果を上げてきたが、専門歩兵チームが装甲化チームによる決定的な機動(decisive manoeuvre)をいかに効果的に支援できるかについて、オーストラリア陸軍全体の理解には依然としてギャップが残っている。装甲化会戦グループ(armoured battlegroup)と歩兵会戦グループ(infantry battlegroup)は、この不足を補うためのコンセプトを策定するために協力することを検討すべきである。
第二に、「撹乱部隊(disrupt force)」には防空兵器や対無人航空機システム兵器が一切搭載されていないことが現場で明らかになった。スティンガー防空システムは、軽量で携帯可能であり、専門部隊が使用するものに比べて比較的簡素な、まさに検討すべき能力の典型である。このような兵器は、敵の回転翼航空機に持続的な脅威を与えることで、敵対者の行動の自由をさらに制限する可能性がある。
第三に、「撹乱部隊(disrupt force)」が都市環境においてどのように最も効果的に活動できるかはまだ明らかではない。都市環境は、「撹乱部隊(disrupt force)」が訓練したオーストラリアの森林地帯や熱帯ジャングルとは、隠蔽の難しさが大きく異なる。適切な計画策定があれば、将来の大規模演習では、市街地コミュニティへの「撹乱部隊(disrupt force)」の投入も検討される可能性がある。
最後に、部隊が利用可能な無人システム(uncrewed system)の数は、現在の紛争におけるそれらの普及度を反映していない。オーストラリア陸軍は、多数の無人システム(uncrewed system)、特に一人のオペレーターが多数の装置を操作できる場合の影響を、戦術レベルで調査する必要がある。同様に、この「撹乱部隊(disrupt force)」は武装無人地上車両を保有していなかったが、この状況は将来の演習で改善される可能性がある。無人航空システム(uncrewed aerial systems)と地上システムに共通する点は、その規模の大きさである。無人航空システム(uncrewed aerial systems)は現在普及しており、無人地上車両は将来さらに普及する可能性がある。オーストラリア陸軍は、多数のシステムにおけるそれらの影響を調査する必要がある。
提言事項
オーストラリア陸軍には検討すべき点が数多くあるが、どれも組織の能力と創意工夫によって実行可能な範囲を超えているわけではない。部隊の実験から導き出された4つの提言を紹介する。
- 歩兵会戦グループ(infantry battlegroup)および装甲化会戦グループ(armoured battlegroup)は、「撹乱部隊(disrupt force)」または関連戦術をさらに発展させるべきである。これには、無人プラットフォーム、超短距離防空兵器、および無人航空システム(uncrewed aerial systems)への対抗手段の活用が含まれるべきである。諸兵科連合戦闘システムにおける歩兵の運用をより完全に発展させるためには、部隊は市街地において、また装甲化部隊と連携した「撹乱部隊戦術(disrupt force tactics)」を探求すべきである。 教訓が共有されれば、現場での更なる研究によって、改良された歩兵および諸兵科連合戦術は、実験的なアイデアから、既知かつ訓練可能な能力へと移行するだろう。重要なのは、本稿で述べた戦術は、特定の「撹乱部隊(disrupt force)」に限定される必要はなく、分散した歩兵(dispersed infantry)が関与する場合、諸兵科連合戦術をより一般的に発展させる可能性があることである。これを実現するために、実験部隊と実戦部隊の間には自然な分業が存在する。実戦部隊は広範な部隊対抗演習に参加できるため、現行システムおよび試験中のシステムを用いた戦術の開発に重点を置くべきである。第 1 装甲化連隊は、各分野の専門家から十分な支援を受けており、緊急事態の作戦責任から保護されているため、技術的な実験に集中するのに適している。
- オーストラリア国防軍(ADF)は、無人航空システム(uncrewed aerial systems)の訓練能力を見直す必要がある。これは、いかなるシステムであっても訓練不足は戦時における運用をより危険にさらすだけであり、安全な能力構築を確実にするものである。適切な成功指標としては、市街地周辺における夜間の水陸両用部隊の展開が挙げられ、作戦の一環として有人航空アセット(crewed air assets)と無人航空アセット(uncrewed air assets)を同時に活用する。その結果、無人航空システム(uncrewed aerial systems)を地上に留めてリスクを管理するのではなく、他の要素部隊と統合するための組織的準備が整うはずである。
- 陸軍は、野外で大量の無人システム(massed uncrewed system)の実験を行うべきである。第1装甲化連隊は、大量の無人システム(massed uncrewed system)の実験を主導すべきである。連隊は、正式に作業支援をタスク付与された技術および法規制の専門家による十分な支援を受けるべきである。実験への集中を維持するため、連隊は緊急事態対応のための戦力配備の責任から免除されるべきである。
- オーストラリア国防軍(ADF)は、戦術的および技術的な実験や研究から得られた教訓を共有し、協力するためのメカニズムを提供する必要がある。これにより、組織全体で実験を行うチームは、過去の成果や現在のプロジェクトを共有することで協力できるようになる。各部隊は、得られた教訓や進行中の試験や実験など、このようなメカニズムに情報を提供し、他のチームとの協力の可能性を探るためにツールを精査することが奨励される。
提言3と4は、現在一部進行中であるにもかかわらず、実験を試みる人々によって2年前に特定されたものであるという事実は、示唆に富んでいる。これらの勧告は、現在の取り組みの妥当性を証明するものであると同時に、現在初期段階にある取り組みにさらなる推進力を与える根拠として捉えるべきである。
結論
本稿で述べたような継続的な適応がなければ、既存の戦術と技術ではオーストラリアの敵対者の挑戦に対抗するには不十分となる可能性が高い。オーストラリア陸軍は用兵についての理論(theories on warfighting)の構築に加え、現場で実験を行い、得られた教訓を広める必要がある。
第一次世界大戦以降の歩兵戦術を検証した結果、歩兵は長らく分散したチーム(dispersed teams)で作戦行動を取り、敵の計画を妨害し、決定的な機動(decisive manoeuvre)のための条件を整えてきたことが明らかになった。現在、西側諸国の軍隊は後継戦術へと収束しつつあり、専門歩兵に無人システム(uncrewed system)を増設することで、高価な敵アセットを危険にさらしている。近年の戦争を検証すると、無人システム(uncrewed system)は将来の戦場における潜在的な脅威ではなく、今日の戦場における既知の脅威であることは明らかである。論理的に言えば、オーストラリア国防軍(ADF)がそれを使用できるかどうかに関わらず、無人システム(uncrewed system)は戦場で広く使用されることになるだろう。
本稿では、このような無人システム(uncrewed system)によって可能になる戦術に関する議論を深めるため、ある部隊が2年間にわたり行った、「撹乱部隊(disrupt force)」を編成するための戦術的・技術的実験について述べる。重要なテーマは、無人プラットフォームを増強した軽歩兵部隊が、いかにして高価な対抗部隊の地上アセット(opposing land assets)を危険にさらし、その作戦を撹乱できるか、そして、費やした資源に比して不釣り合いな効果(disproportionate effect)を発揮できるか、ということである。成功への直線的な道筋はなかったが、これらの演習によって、航空、装甲、砲兵との統合を含め、歩兵がいかにして不釣り合いな効果(disproportionate effect)を発揮できるかというモデルが得られた。
「撹乱部隊(disrupt force)」モデルは、更なる発展の基盤となる。不完全であることはほぼ確実だが、現場での実験は、このコンセプトへの更なる投資を正当化するのに十分な潜在能力を示した。更なる研究によって、分散、混合チーム、あるいは無人システム(uncrewed system)を活用した、より一般的な歩兵戦術および諸兵科連合戦術が開発される可能性がある。こうした実践的な洞察は、士官食堂での憶測や理論の検証だけでは得られない。部隊は現場に展開し、実験を行う必要がある。会戦グループ(battlegroups)は「撹乱部隊(disrupt force)」または関連戦術の開発を継続するべきであり、オーストラリア陸軍はより広範に、大量の無人システム(massed uncrewed system)の運用を模索すべきである。オーストラリア国防軍(ADF)は、現在非常に限られている無人航空システム(uncrewed aerial systems)の訓練能力を見直す必要がある。最後に、技術的および戦術的実験から得られた教訓の共同作業と共有を可能にするメカニズムを導入し、共同作業を主導する主導機関(陸軍内またはより広範な組織内)が主導すべきである。
オーストラリア地域における大国間の対立が戦争にエスカレートするリスクが生じる前に、オーストラリア陸軍にはいくらかの時間と機会がある。オーストラリア、米国、英国の各軍はそれぞれ独立して、高度に展開可能な部隊で致死性を発揮する「撹乱部隊(disrupt force)」のコンセプトを検証してきた。野外での大規模な実験は、「霧の散兵戦(skirmishing mist)」、「撹乱部隊(disrupt force)」、および類似のコンセプトは、技術的および規制的専門知識を備えた部隊でさらに開発する価値があることを示している。オーストラリア陸軍が第1装甲化連隊を実験部隊に指定したことはまたとない機会を提供するが、技術がオーストラリア陸軍に導入されるまでの間、基礎的な戦術と部隊構造は今日の部隊で運用することができる。我々の会戦グループ(battlegroup)は、今、厳しい部隊対抗演習を通じて撹乱的かつ現代的な戦術を開発することもできるし、あるいは同じ教訓を、後に、はるかに大きな代償を払って、戦争のトラウマを通して学ぶこともできる。
ノート
[1] 「テンポ」は敵対者に対して望ましい優位性であるが、オーストラリア陸軍の陸戦教義3-0作戦における正式な「機動理論の信条」でもある。
[2] ウィリアム・S・リンド(William S Lind)とグレゴリー・A・ティール(Gregory A Thiele)著「第4世代戦争ハンドブック」、Vox Day編(コウヴォラ:カスタリアハウス、2015年)、84ページ。
[3] 国防省、「国防:国防戦略見直し2023」(キャンベラ:オーストラリア連邦、2023年)、71ページ。
[4] A.キャンベル(A Campbell)とG・モリアーティ(G Moriarty)著「国防長官と国防軍司令官からのメッセージ」、国防省の電子メール、2023年4月24日。
[5] 2023年に戦闘訓練センター(CTC)に戦闘チームの実験に関する既存のデータセットの提供を依頼したが、そのような情報は収集も保持もされていないと著者は報告した。
[6] 国防省、「陸軍への主要な変更を発表」、国防省(ウェブサイト)、2023年9月28日。
[7] 国防省、「オーストラリア国防用語集」[内部ネットワーク文書]、2023年12月1日。
[8] マクレガー・ノックス(MacGregor Knox)、ウィリアムソン・マレー(Williamson Murray)著「軍事革命のダイナミクス 1300-2050」(ケンブリッジ大学出版、2001年)、12ページ。
[9] オレクサンドラ・モロイ(Oleksandra Molloy)著「現代の戦争におけるドローン:ウクライナ戦争から学んだ教訓」、オーストラリア陸軍臨時論文第29号(キャンベラ:オーストラリア陸軍研究センター、2024年)、92、94ページ。
[10] 筆者は2024年、ウクライナでロシア軍に対してドローンを運用した経験豊富なオーストラリア歩兵およびUASオペレーターにインタビューを行った。オペレーターの氏名は安全のため伏せている。オペレーターは、部隊内で多数のUASが運用されていること、車両や降車車両を遠距離から探知・打撃できること、そして日中の戦場での移動の難しさについて証言した。
[11] オーストラリア陸軍、「陸戦ドクトリン3-0-3フォーメーション戦術2016(暫定版)」(キャンベラ:国防省、2016年)、28ページ。国防保護ネットワークで入手可能。
[12] 同上、26ページ。
[13] 同上、149ページ。
[14] 同上、25ページ。
[15]イアン・ラングフォード(Ian Langford)著「オーストラリア特殊作戦:原則と考慮事項」(国防省将来陸戦局、2014年)、12ページ。
[16] オーストラリアの作家イアン・ラングフォード(Ian Langford)は、SFは戦争のあらゆるレベルで拡張可能で運用可能であると述べているが、特殊作戦には戦略的目的が必要であると推奨している: ラングフォード、オーストラリア特殊作戦、7、10ページ。マクレイヴン(McRaven)の独創的な特殊作戦理論は、戦略的または作戦的性質の行動のケーススタディを使用している: ウィリアム・H・マクレイヴン(William H McRaven)、 Spec Ops: 特殊作戦戦争のケーススタディ: 理論と実践、Kindle版 (プレシディオ・プレス、1996年)、第1章。
[17] ジェームズ・イーストン(James Easton)、ジョシュア・コロ(Joshua Kolo)著「戦略的競争においてSOFの価値を生み出すための技術的スペクトルの活用」、オーストラリア陸軍臨時論文第13号(キャンベラ:オーストラリア陸軍研究センター、2022年)、13、14、28ページ。
[18] アンドリュー・ホッキング(Andrew Hocking)、「将来への準備:アフガニスタン作戦から得られた重要な組織的教訓」、ヴァンガード・オケーショナル・ペーパーズ(キャンベラ:国防省、2022年)、25ページ。
[19] オーストラリア国防軍、 ADF-C-0オーストラリア軍事ドクトリンの基礎Ed 4、オーストラリア国防ドクトリン出版物-D(情報・グラフィックス・電子資源局、2021年)、14ページ。
[20] 国防戦略見直し2023、54ページ。
[21] 同上、49、72ページ。
[22] アンドリュー・カー(Andrew Carr)とステファン・フリューリング(Stephan Frühling)著「抑止力のための前方展開:オーストラリア陸軍への影響」、オーストラリア陸軍臨時論文第15号(キャンベラ:オーストラリア陸軍研究センター、2023年)、2ページ。
[23] 同上、13ページ。
[24] 国防省、「国家防衛戦略」(キャンベラ:オーストラリア連邦、2024年)、40ページ。
[25] オーストラリア陸軍、陸戦教義3-3-7歩兵の運用(キャンベラ:国防省、2008年)、1~4ページ。
[26] Albert Palazzo, Resetting the Australian Army: Negotiating the 2023 Defence Strategic Review, Australian Army Occasional Paper No. 16 (Canberra: Australian Army Research Centre, 2023), p. 29.
アルバート・パラッツォ(Albert Palazzo)著「オーストラリア陸軍の再設定:2023年国防戦略見直しの交渉」、オーストラリア陸軍臨時論文第16号(キャンベラ:オーストラリア陸軍研究センター、2023年)、29ページ。
[27] Carr and Frühling, Forward Presence for Deterrence, p. 5.
カール(Carr)とフリューリング(Frühling)著「抑止力のための前方展開」 5ページ。
[28] S Stuart, ‘The Human Face of Battle and the State of the Army Profession’, keynote speech, Chief of Army Symposium, Melbourne, 2024.
S・スチュアート(S Stuart)著「戦闘の人間的側面と陸軍職業の現状」、陸軍参謀総長シンポジウム基調講演、メルボルン、2024年。
[29] Carl von Clausewitz, On War (Princeton NJ: Princeton University Press, 1989 [1832]), p. 77.
カール・フォン・クラウゼヴィッツ(Carl von Clausewitz)著「戦争論」(プリンストン大学出版局、1989年[1832年])、77ページ。
[30] Jim Storr, The Human Face of War (A&C Black, 2009), p. 107.
ジム・ストー(Jim Storr)著「戦争の人間的側面」(A&Cブラック、2009年)、107ページ。
[31] Ibid., p. 108.
同上、108ページ。
[32] William Slim, Defeat into Victory (New York: Cooper Square Press, 2000), pp. 20, 122, 572.
ウィリアム・スリム(William Slim)著「敗北から勝利へ」(ニューヨーク:クーパースクエアプレス、2000年)、20、122、572ページ。
[33] Lind and Thiele, 4th Generation Warfare Handbook, p. 71.
リンド(Lind)とティーレ(Thiele)著「第4世代戦争ハンドブック」71ページ。
[34] Ibid., p. 73.
同上、73ページ。
[35] Ibid., p. 78.
同上、78ページ。
[36]Zachary Morris, ‘Developing a Light-Infantry Robotic Company as a System’, Military Review, July–August 2018.
ザカリー・モリス(Zachary Morris)著「軽歩兵ロボット中隊をシステムとして開発する」、ミリタリーレビュー、2018年7-8月。
[37] Ibid., pp. 21, 25.
同上、21、25ページ。
[38] Ibid., p. 20.
同上、20ページ。
[39] Ibid., p. 22.
同上、22ページ。
[40] Benjamin Jensen and John Paschkewitz, ‘Mosaic Warfare: Small and Scalable Are Beautiful’, War On the Rocks, 23 December 2019.
ベンジャミン・ジェンセン(Benjamin Jensen)とジョン・パシュケヴィッツ(John Paschkewitz)著「モザイク戦争:小さくてスケーラブルなものが美しい」、ウォー・オン・ザ・ロックス、2019年12月23日。
[41] ‘Loitering Munition: New Word Suggestion’, definition, Collins English Dictionary.
「徘徊型弾薬:新語の提案」の定義、コリンズ英語辞典。
[42] Matthew Sawers and Kim Tang, Semi-Autonomous combat team Dismounted Infantry 2030 Concept (Canberra: Defence Science and Technology Group, 2020), p. 4.
マシュー・ソーワーズ(Matthew Sawers)とキム・タン(Kim Tang)、「半自律戦闘チーム下車歩兵2030コンセプト」(キャンベラ:国防科学技術グループ、2020年)、4ページ。
[43] Ibid., p 17.
同上、17ページ。
[44] Ibid., p. 9.
同上、9ページ。
[45] Ibid., pp. iv, 2.
同上、iv、2ページ。
[46] Nicholas Kempt, ‘Skirmishing Mist’ Dismounted Infantry 2030 Concept (Canberra: Defence Science and Technology Group, 2020), pp. 28–37.
ニコラス・ケンプト、「「霧の散兵戦(skirmishing mist)」下車歩兵2030コンセプト(キャンベラ:国防科学技術グループ、2020年)、28~37ページ。
[47] Ibid., p. 6.
同上、6ページ。
[48] Ibid., p. 6.
同上、6ページ。
[49] Lind and Thiele, 4th Generation Warfare Handbook, p. 74.
リンド(Lind)とティーレ(Thiele)著「第4世代戦争ハンドブック」74ページ。
[50] Kempt, ‘Skirmishing Mist’, pp. 9, 34.
ケンプト(Kempt)著「霧の散兵戦(skirmishing mist)」 9、34ページ。
[51] Ibid., p. 8.
同上、8ページ。
[52] Ibid., p. 4.
同上、4ページ。
[53] Sincere thanks to the officers of the 1st Battalion, the Royal Welsh, for allowing their post-activity report to be referenced here. 1st Battalion, Royal Welsh, Op CABRIT 10 ISTAR Group Mid-Tour WARDEV Report (2022).
活動後の報告書をここに引用することを許可してくださったロイヤル・ウェルシュ第1大隊の将校たちに心から感謝する。ロイヤル・ウェルシュ第1大隊、 Op CABRIT 10 ISTARグループ中間ツアーWARDEV報告書(2022年)。
[54] Gary Waters, Gulf Lesson One—the Value of Air Power: Doctrinal Lessons for Australia (Air Power Studies Centre, 1992), p. 183.
ゲイリー・ウォーターズ(Gary Waters)著「湾岸戦争の教訓1:航空力の価値:オーストラリアへの教義上の教訓」(航空力研究センター、1992年)、183ページ。
[55] Ibid.
同上
[56] Ibid., pp. 182–184.
同上、182~184ページ。
[57] Yitzhak Schichor, ‘The U.S. Factor in Israel’s Military Relations with China’, China Brief, 24 May 2005.
イツハク・シチョル(Yitzhak Schichor)著「イスラエルと中国の軍事関係における米国の要因」、チャイナ・ブリーフ、2005年5月24日。
[58] Introduction of the Shadow UAS: ‘Shadow 200 RQ-7 Tactical Unmanned Aircraft System’, Army Technology (website), 13 March 2020. Introduction of the Switchblade loitering munition: Paul McLeary, ‘US Army Wants More Switchblades: Remote-Control Munitions Are Small, Lethal’, Defense News, 12 February 2013.
シャドウUASの導入:「シャドウ200 RQ-7戦術無人航空機システム」、陸軍技術(ウェブサイト)、2020年3月13日。スイッチブレード徘徊型弾薬の導入:ポール・マクリアリー(Paul McLeary)著「米陸軍はスイッチブレードをもっと欲している:遠隔操作兵器は小型で致死性がある」、国防ニュース、2013年2月12日。
[59] Phillip A Karber, ‘Lessons Learned from the Russo-Ukrainian War’ (Historical Lessons Learned Workshop, The Potomac Foundation, 2015).
フィリップ・A・カーバー(Phillip A Karber)著「ロシア・ウクライナ戦争から学んだ教訓」(歴史教訓ワークショップ、ポトマック財団、2015年)。
[60] Patrick Tucker, ‘In Ukraine, Tomorrow’s Drone War Is Alive Today’, Defense One, 9 March 2015.
パトリック・タッカー(Patrick Tucker)著「ウクライナでは明日のドローン戦争が今始まっている」、ディフェンス・ワン、2015年3月9日。
[61] ‘Small Drones at War in Ukraine’ (audio), The World (PRX), 19 August 2022.
「ウクライナで小型ドローンが戦争」(音声)、 The World(PRX)、2022年8月19日。
[62] Mykhaylo Zabrodskyi, Jack Watling, Oleksandr V Danylyuk and Nick Reynolds, Preliminary Lessons in Conventional Warfighting from Russia’s Invasion of Ukraine: February–July 2022 (London: Royal United Services Institute, 2022), p. 57.
ミハイロ・ザブロツキー(Mykhaylo Zabrodskyi)、ジャック・ワトリング(Jack Watling)、オレクサンドル・V・ダニリュク(Oleksandr V Danylyuk)、ニック・レイノルズ(Nick Reynolds)著「ロシアのウクライナ侵攻から学ぶ従来型の用兵(Conventional Warfighting)の予備的教訓:2022年2~7月」(ロンドン:王立安全保障研究所、2022年)、57ページ。
[63] Eado Hecht, ‘Drones in the Nagorno-Karabakh War: Analyzing the Data’, Military Strategy Magazine 7 (2022): 31–37.
エド・ヘクト(Eado Hecht)著「ナゴルノ・カラバフ戦争におけるドローン:データ分析」、軍事戦略マガジン7(2022年):31-37。
[64] Antonio Calcara, Andrea Gill, Mauro Gilli, Raffaele Marchetti and Ivan Zaccagnini, ‘Why Drones Have Not Revolutionized War: The Enduring Hider-Finder Competition in Air Warfare’, International Security 46, no. 4 (2022): 151.
アントニオ・カルカラ(Antonio Calcara)、アンドレア・ギル(Andrea Gill)、マウロ・ギリ(Mauro Gilli)、ラファエレ・マルケッティ(Raffaele Marchetti)、イヴァン・ザッカニーニ(Ivan Zaccagnini)著「なぜドローンは戦争に革命をもたらさなかったのか:空中戦における永続的な隠れ家と発見者の競争」、国際安全保障46巻4号(2022年):151ページ。
[65] Ibid., p. 133.
同上、133ページ。
[66] Ibid., p. 169.
同上、169ページ。
[67] Ibid., p. 210.
同上、210ページ。
[68] US Department of Defense, Military and Security Developments Involving the People’s Republic of China 2022: Annual Report to Congress (Washington DC: US Department of Defense, 2022).
米国防総省、「中華人民共和国に関わる軍事および安全保障の動向2022年:議会への年次報告書」(ワシントンD.C.:米国防総省、2022年)。
[69] THeMIS unmanned ground vehicle deployed by Estonia: Sebastian Sprenger, ‘Estonian Robotics Company Makes Inroads with European Armies’, C4ISRNet, 6 November 2020. Drone 40 deployed by the British Army: Harry Lye, ‘British Army Using Small Grenade-Launched Drone in Mali’, Army Technology (website), 9 February 2021.
エストニアが配備したTHeMIS無人地上車両:セバスチャン・シュプレンガー(Sebastian Sprenger)著「エストニアのロボット工学会社が欧州軍に進出」、 C4ISRNet、2020年11月6日。英陸軍が配備したドローン40:ハリー・ライ(Harry Lye)著「英陸軍がマリで小型擲弾発射ドローンを使用」、陸軍技術(ウェブサイト)、2021年2月9日。
[70] ‘Ukraine Conflict: ‘THeMIS Robot Delivered to Kyiv as Russia Announces Bounty for System’s Capture’, Janes, 2022; accessed 17 May 2023.
「ウクライナ紛争:ロシアがシステムの捕獲に懸賞金を発表、THeMISロボットがキエフに搬送」ジェーンズ、2022年、2023年5月17日にアクセス。
[71] ‘How Ukrainian DIY Drones Are Taking Out Russian Tanks’ (video), Wall Street Journal, 10 November 2023.
「ウクライナのDIYドローンがロシアの戦車を撃破する方法」(ビデオ)、ウォール・ストリート・ジャーナル、2023年11月10日。
[72] Quentin Sommerville, ‘Russia’s Kamikaze Drones Raining Down on Ukraine’s East’, BBC News, 30 August 2023.
クエンティン・サマービル(Quentin Sommerville)著「ロシアの神風ドローンがウクライナ東部に降り注ぐ」、 BBCニュース、2023年8月30日。
[73] Colin Demarest, ‘US Army Developing LASSO Tank-Killing Drone for Infantry’, Defense News, 1 August 2023.
コリン・デマレスト(Colin Demarest)著「米陸軍、歩兵向けにLASSO戦車破壊ドローンを開発中」、国防ニュース、2023年8月1日。
[74] Carl Rhodes, Small Aircraft, Sizeable Threats: Preparing Army to Counter Small Uncrewed Aerial Systems, Australian Army Occasional Paper No. 24 (Canberra: Australian Army Research Centre, 2024), p. 47.
カール・ローズ(Carl Rhodes)著「小型航空機の大きな脅威:小型無人航空システム(small uncrewed aerial systems)に対抗するための陸軍の準備」、オーストラリア陸軍臨時論文第24号(キャンベラ:オーストラリア陸軍研究センター、2024年)、47ページ。
[75] Department of Defence, Defence Capability Manual (Canberra: Department of Defence, 2022), p. 3.
国防省、「防衛能力マニュアル」(キャンベラ:国防省、2022年)、3ページ。
[76] Easton and Kolo, Exploiting the Technological Spectrum, pp. 13, 24.
イーストン(Easton)とコロ(Kolo)著「技術的スペクトラムの活用」13、24ページ。
[77] Ash Rossiter, ‘The Impact of Robotics and Autonomous Systems (RAS) Across the Conflict Spectrum’, Small Wars & Insurgencies 31, no. 4 (2020): 693–694.
アッシュ・ロシター(Ash Rossiter)著「紛争スペクトル全体におけるロボット工学と自律システム(RAS)の影響」、 Small Wars & Insurgencies 31、第4号(2020年):693-694ページ。
[78] Army currently has no armed uncrewed aerial systems or loitering munitions in service: Peter Hartcher and Matthew Knott, ‘The First 72 Hours: How an Attack on Taiwan Could Rapidly Reach Australia’, Sydney Morning Herald, 8 March 2023.
陸軍は現在、無人航空システム(uncrewed aerial systems)や徘徊型兵器を運用していない:ピーター・ハーチャー(Peter Hartcher)とマシュー・ノット(Matthew Knott)著「最初の72時間:台湾への攻撃がいかにしてオーストラリアに急速に到達するか」、シドニー・モーニング・ヘラルド、2023年3月8日。
[79] Government has announced the introduction into service of the Switchblade 300: Department of Defence, ‘Australian Government Announces Acquisition of Precision Loitering Munition’, media release, 8 July 2024.
政府はスイッチブレード300の導入を発表した。国防省、「オーストラリア政府、精密徘徊型弾薬の取得を発表」、メディアリリース、2024年7月8日。
[80] Rebecca Crootof, ‘The Varied Law of Autonomous Weapon Systems’, in Andrew Williams and Paul Scharre (eds), NATO Allied Command Transformation, Autonomous Systems: Issues for Defence Policy Makers (Norfolk VA: NATO Headquarters Supreme Allied Commander Transformation, 2015), pp. 102–103.
レベッカ・クルートフ(Rebecca Crootof)著「自律型兵器システムのさまざまな法則」、アンドリュー・ウィリアムズ(Andrew Williams)、ポール・シャーレ(Paul Scharre)編、「 NATO連合軍の変革、自律システム:防衛政策立案者にとっての課題」(バージニア州ノーフォーク:NATO本部、最高連合軍司令官、2015年)、102~103ページ。
[81] Laura Bruun, Marta Bo and Netta Goussac, Compliance with International Humanitarian Law in the Development and Use of Autonomous Weapon Systems: What Does IHL Permit, Prohibit and Require? (Stockholm International Peace Research Institute, 2023), p. 24.
ローラ・ブルーン(Laura Bruun)、マルタ・ボー(Marta Bo)、ネッタ・グサック(Netta Goussac)著「自律型兵器システムの開発と使用における国際人道法の遵守:国際人道法は何を許可し、禁止し、要求しているのか?」(ストックホルム国際平和研究所、2023年)、24ページ。
[82] Ibid., p. 25.
同上、25ページ。
[83] Damian Copeland, Rain Liivoja and Lauren Sanders, ‘The Utility of Weapons Reviews in Addressing Concerns Raised by Autonomous Weapon Systems’, Journal of Conflict and Security Law 28, no. 2 (2023): 315.
ダミアン・コープランド(Damian Copeland)、レイン・リーヴォヤ(Rain Liivoja)、ローレン・サンダース(Lauren Sanders)著「自律型兵器システムによって生じる懸念への対応における兵器レビューの有用性」紛争・安全保障法ジャーナル28巻2号(2023年):315ページ。
[84] Senate Foreign Affairs and Trade References Committee, Use of Unmanned Air, Maritime and Land Platforms by the Australian Defence Force (Canberra: Commonwealth of Australia, 2015), p. 70.
上院外交貿易委員会「オーストラリア国防軍による無人航空機・海上・陸上プラットフォームの活用」(キャンベラ:オーストラリア連邦、2015年)、70ページ。
[85] Ibid., p. 65.
同上、65ページ。
[86] Allan Gyngell and Stephanie Koorey, ‘Lethal Autonomous Weapons Systems: Challenges and Opportunities’, Australian National University Journal of Law and Technology 2, no. 1 (2021): 177.
アラン・ギンゲル(Allan Gyngell)とステファニー・クーリー(Stephanie Koorey)著「致死的自律型兵器システム:課題と機会」、オーストラリア国立大学法と技術ジャーナル2、第1号(2021年):177ページ。
[87] Andrew Tillet, ‘“Nothing illegal”: Australia Rebuffs Cardboard Drone Attack Claim’, Australian Financial Review, 6 September 2023.
アンドリュー・ティレット(Andrew Tillet)著「オーストラリア、段ボール製ドローン攻撃の主張を否定「違法行為ではない」」オーストラリアン・ファイナンシャル・レビュー、2023年9月6日。
[88] ‘About Us’, Stop Killer Robots (website) (accessed 18 May 2023).
「我々について」、 Stop Killer Robots(ウェブサイト)(2023年5月18日アクセス)。
[89] Senate Foreign Affairs and Trade References Committee, Use of Unmanned Air, Maritime and Land Platforms, pp. xi, 64.
上院外交貿易委員会、無人航空機・海上・陸上プラットフォームの使用、pp. xi、64ページ。
[90] B Joseph, S Langevin, O Amram, P Le Blaye and B N’Kaoua, ‘Cognitive Task Analysis: A Crucial Step to Improve the Usability of a Ground Control Station for Unmanned Air System Mission’, conference paper, NATO RTO SCI-202 Symposium on Intelligent Uninhabited Vehicle Guidance Systems (Neubiberg, 2009), p. 1.
B ジョゼフ(B Joseph)、S ランジュバン(S Langevin)、O アムラム(O Amram)、P ル ブレイ(P Le Blaye)、B ンカウア(B N’Kaoua)著「認知タスク分析:無人航空システムミッションにおける地上管制ステーションの使い勝手を向上させるための重要なステップ」、NATO RTO SCI-202インテリジェント無人車両誘導システムシンポジウム(Neubiberg、2009年)、1ページ。
[91] Department of Defence, ‘Australian Government Announces Acquisition of Precision Loitering Munition’.
国防省、「オーストラリア政府、精密徘徊型弾薬の取得を発表」
[92] Australian Army, Land Warfare Procedures—Combat Arms (Aviation) LWP-CA (AVN) 3-3-1 Aviation Battlegroup (Canberra: Australian Army, 2016), section 6-5.
オーストラリア陸軍、陸戦手順—戦闘兵器(航空)LWP-CA(AVN)3-3-1航空戦闘群(キャンベラ:オーストラリア陸軍、2016年)、第6-5節。
[93] ‘HDT Hunter Wolf’, HDT Global (website), 2023 (accessed 17 May 2023).
「 HDTハンター・ウルフ」、 HDT Global(ウェブサイト)、2023年(2023年5月17日アクセス)。
[94] ‘Defence Images’, Department of Defence (website), 2022 (accessed 1 November 2023).
{kind=link}
「国防イメージ」、国防省(ウェブサイト)、2022年(2023年11月1日にアクセス)。
[95] ‘Defendtex UAV’, Defendtex (website), 2023 (accessed 17 May 2023).
「 Defendtex UAV」、 Defendtex(ウェブサイト)、2023年(2023年5月17日アクセス)。
[96] A mesh network is a local area network topology in which the infrastructure nodes connect directly, dynamically and non-hierarchically to as many other nodes as possible and cooperate with one another to efficiently route data to and from clients. ‘Wireless Mesh Network’, Wikimedia.org, 2022; accessed 28 October 2022.
メッシュ・ネットワークは、インフラストラクチャ・ノードが可能な限り多くの他のノードに直接、動的、非階層的に接続し、相互に協力してクライアントとの間でデータを効率的にルーティングするローカル・エリア・ネットワーク・トポロジである。「ワイヤレス・メッシュ・ネットワーク」、Wikimedia.org、2022年、2022年10月28日にアクセス。
[97] ‘Google Play Store—ATAK-CIV (Civil Use)’, Google, 2023 (accessed 1 November 2023).
「 Google Playストア – ATAK-CIV(民生用)」、 Google、2023年(2023年11月1日アクセス)。
[98] Chris Hall, ‘Interim Observations—UAS and UGV Employment’, Department of Defence email, 8 June 2021.
クリス・ホール(Chris Hall)著「暫定観察 – UASとUGVの運用」、国防省の電子メール、2021年6月8日。
[99] Slim, Defeat into Victory, pp. 150, 406, 53; Justin Bailey, ‘In Times of War, Animals Allowed to Take Lead’, Australian Financial Review, 22 June 2010.
スリム(Slim)著「敗北から勝利へ」150、406、53ページ;ジャスティン・ベイリー「戦時中は動物が主導権を握ることを許される」オーストラリアン・ファイナンシャル・レビュー、2010年6月22日。
[100] The CTC independently adjudicated the results of the exercise, including the calculation of casualties. See 1 RAR, combat team Charlie Combined After Action Review—Battlegroup Warfighter and Ex Talisman Sabre 2021 (Australian Army, 2021), p. 3.
戦闘訓練センター(CTC)は、死傷者の計算を含む演習の結果を独自に裁定した。オーストラリア王立連隊第1大隊(1RAR)、「Combat Team Charlie Combined After Action Review—Battlegroup Warfighter and Ex Talisman Sabre 2021」(オーストラリア陸軍、2021年)、3ページを参照。
[101] Slim, Defeat into Victory, pp. 20, 122, 572.
スリム(Slim)著「敗北から勝利へ」20、122、572ページ。
[102] ES Vorm, ‘Autonomous Casualty Evacuation’, Call Signs 10, no. 1 (2022): 27.
ESフォルム(ES Vorm)著「自律型負傷者避難」、コールサイン10、第1号(2022年):27ページ。
[103] Kempt, ‘Skirmishing Mist’, p. 6.
ケンプト(Kempt)著「霧の散兵戦(skirmishing mist)」 6ページ。
[104] Ibid., pp. 31–32.
同上、31~32ページ。
[105] Ibid., p. 9.
同上、9ページ。
[106] ‘Defence Images’, Department of Defence (website), 2022 (accessed 1 November 2023).
{kind=link}
「国防イメージ」、国防省(ウェブサイト)、2022年(2023年11月1日にアクセス)。
[107] 1 RAR, I6 Ex Sea Explorer After Action Review (Australian Army, 2022), pp. 2–3.
オーストラリア王立連隊第1大隊(1RAR)、 I6 Ex Sea Explorer戦闘レビュー(オーストラリア陸軍、2022年)、pp.2-3ページ。
[108] ‘Defence Images’, Department of Defence (website), 2022 (accessed 1 November 2023).
{kind=link}
「国防イメージ」、国防省(ウェブサイト)、2022年(2023年11月1日にアクセス)。
[109] The skirmishing mist is ‘based on the principle of small independent teams operating disconnected, disaggregated and decentralised below the detection threshold’. Kempt, ‘Skirmishing Mist’, p. iii.
「霧の散兵戦(skirmishing mist)」 は、「検知閾値以下の小規模な独立したチームが、分断され、分散され、分散して活動するという原則に基づいている」。ケンプト(Kempt)著「霧の散兵戦(skirmishing mist)」 、iiiページ。
[110] Ibid., p. 17.
同上、17ページ。
[111] 1 RAR, User Requirement—Dismounted Support Vehicles (3 Brigade, 2022).
オーストラリア王立連隊第1大隊(1RAR)、ユーザー要件—下車支援車両(第3旅団、2022年)。
[112] As a counter-example, one private wrote detailed, thoughtful feedback on the Hunter Wolf from his team’s perspective when asked the right questions.
反例として、ある兵士は、適切な質問をされた際に、チームの視点からハンター・ウルフについて詳細かつ思慮深いフィードバックを書いた。
[113] Vorm, ‘Autonomous Casualty Evacuation’, p. 27.
フォルム「自律型負傷者避難」27ページ。
[114] Defence Strategic Review 2023, p. 20. The authors argue that Defence’s ‘approach to capability acquisition … needs to abandon its pursuit of the perfect solution or process and focus on delivering timely and relevant capability’.
国防戦略見直し2023、20ページ。著者らは、国防の「能力獲得へのアプローチは…完璧な解決策やプロセスの追求を放棄し、タイムリーで適切な能力の提供に焦点を当てる必要がある」と主張している。
[115] In one instance, it was only discovered that 1 RAR and a Navy team were working on a similar problem through a face-to-face discussion at a technology demonstration. In another example, correspondence to a unit which was resourced specifically for experimentation received no reply. A later face-to-face discussion included the prospect of collaboration, which failed to materialise.
ある例では、オーストラリア王立連隊第1大隊(1RAR)と海軍チームが同様の問題に取り組んでいることが、技術デモンストレーションでの対面での議論を通じて初めて発覚した。別の例では、実験専用のリソースを割り当てられた部隊に連絡を取ったが、返信がなかった。その後の対面での議論では協力の可能性も示唆されたが、実現には至らなかった。
[116] Jozef McGurk and Nicholas Bardell, ‘The Influence of Work Health Safety on Australia’s Military Aviation Regulatory Framework’, Contemporary Issues in Air and Space Power 1, no. 1 (2023): 1, 8.
ジョゼフ・マクガーク(Jozef McGurk)とニコラス・バーデル(Nicholas Bardell)著「オーストラリアの軍事航空規制枠組みに対する労働安全衛生の影響」、航空宇宙力の現代的課題1、第1号(2023年):1、8ページ。
[117] Defence Aviation Safety Authority, Defence Air Safety Regulations UAS—Uncrewed Aircraft Systems (Canberra: Department of Defence, 2022).
国防航空安全局、「国防航空安全規則 UAS—無人航空機システム」(キャンベラ:国防省、2022年)。
[118] John J Tolson, Airmobility, 1961–1971 (Department of the Army, 1973), p. 27.
ジョン・J・トルソン(John J Tolson)著「航空モビリティ1961-1971」(陸軍省、1973年)、27ページ。
[119] Kempt, ‘Skirmishing Mist’, p. 5.
ケンプト(Kempt)著「霧の散兵戦(skirmishing mist)」 5ページ。
[120] カール(Carr)とフリューリング(Frühling)著「抑止力のための前方展開」17ページ;パラッツォ(Palazzo)著「オーストラリア陸軍の再設定」29ページ。
[121] 国防省、防衛能力マニュアル、11ページ。
[122] オーストラリアはこの特定の分野における既存の能力を過小評価すべきではない。ドローンシールドの「ドローンガン」は、ブラジル大統領就任式でUASを撃退するためにブラジルでうまく配備された:「ドローンシールドがブラジル大統領就任式に配備」、アジア太平洋防衛レポーター、2023年1月3日。EOSによって製造された遠隔兵器ステーションは、ウクライナと契約されている:「 EOS、ウクライナで2番目のRWS契約を獲得」、オーストラリア防衛マガジン、2023年4月28日。SYPAQのCorvoドローンはウクライナに配備された:ポール・スミス(Paul Smith)著「ウクライナで使用される段ボール製ドローンメーカーはオーストラリアのトップイノベーター」、オーストラリアン・ファイナンシャル・レビュー、2023年9月27日。そして、Defendtex Drone 40は英軍によってマリに配備された:ライ(Lye)著「英軍がマリで小型グレネード発射ドローンを使用」。