ミッション・エンジニアリング (International Test and Evaluation Association)
MILTERMでは、2021年に「米国防総省のミッション・エンジニアリング・ガイド」と2024年に「米国防総省のミッション・エンジニアリング・ガイド第2版」を掲載し、デジタル・エンジニアリング手法を用いた効果的な衛装備品の研究開発プロセスを紹介してきたところである。これらの米国防総省のガイドブックについて適用した場合どのように具体化していけばよいかを知りたくなるところである。国際試験・評価協会の機関誌に手がかりをつかめる記事があったので紹介するところである。(軍治)
![]()
ミッション・エンジニアリング
Mission Engineering
SEPTEMBER 2024
International Test and Evaluation Association
著者紹介

The MITRE Corporation McLean, Virginia |
ジュディス・ダーマン(Judith Dahmann)博士は、MITRE CorporationのMITREフェローであり、米国国防総省国防研究技術次官室におけるミッション統合技術サポート活動のMITREプロジェクト・リーダーである。彼女は、選択された優先防衛ミッションのミッション・エンジニアリング活動と、ミッション・エンジニアリングへのデジタル・エンジニアリングの適用をサポートするチームを率いている。彼女は、システム・オブ・システムズ(SoS)のシステム・エンジニアリングに関する国防総省ガイドの開発のテクニカル・リーダーであり、また「システムのライフサイクル全体にわたるシステム・オブ・システムズ(SoS)の考慮事項」に関する最初の国際規格である国際標準化機構(ISO)21839のプロジェクト・リーダーだった。それ以前は、米国国防研究技術局長の国防モデリングおよびシミュレーション・オフィスの主任科学者(1995~2000年)であり、現在IEEE規格(IEEE 1516)となっている、シミュレーション用の汎用分散ソフトウェア・アーキテクチャである高レベル・アーキテクチャ(HLA)の開発を主導した。ダーマン(Dahmann)博士は、国際システム・エンジニアリング評議(INCOSE)のフェローであり、INCOSE Systems of Systemsワーキング・グループの共同議長、および国防産業協会SE部門SoS SE委員会の共同議長を務めている。

Gabriela I Parasidis Lead Systems Engineer, MITRE McLean, Virginia |
ガブリエラ・パラシディス(Gabriela Parasidis)は、MITRE宇宙用兵部門の主任システム・エンジニアである。彼女は、国防総省の調達決定をサポートするために、デジタル・エンジニアリングをミッション・エンジニアリングとシステム・オブ・システムズ(SoS)エンジニアリングに適用している。彼女は、飛行力学、空気力学、空気熱力学、構造荷重に関連する分析を含む極超音速の研究を主導してきた。彼女は、コーネル大学で機械工学の学士号、ジョンズ・ホプキンス大学でシステム・エンジニアリングの修士号を取得している。
概要
米国国防総省(DoD)は、システム・エンジニアリングの「ミッション」への適用、つまり、組織、人、技術システムを含むシステム・オブ・システムズ(SoS)をエンジニアリングし、ミッションの成果に望ましい影響を与えることを重視してきた。従来、システム・オブ・システムズ(SoS)エンジニアリングは、指定された技術的性能を達成するためのシステムまたはシステム・オブ・システムズ(SoS)をデザインすることに重点を置いていた。ミッション・エンジニアリングは、さらに一歩進んで、シミュレートされた環境における現実的なシナリオで実施された場合に、ミッションまたは能力目標を達成するためのシステム・オブ・システムズ(SoS)の性能を評価する。
ミッション・エンジニアリング(ME)は、システム・オブ・システムズ(SoS)が期待された影響を与えるかどうかを評価するだけでなく、それらの影響がミッションの成功につながるかどうかも判断する。国防総省のミッション・エンジニアリング手法は、デジタルモデルベースのエンジニアリングアプローチを適用し、システム・オブ・システムズ(SoS)がミッション目標をどの程度達成し、ミッション能力のギャップをどの程度埋めるかを評価する。この国防総省ミッション・エンジニアリング手法を導入するアプローチは、国防次官(研究・エンジニアリング担当)室(OUSD(R&E))のために、迅速防衛予備実験(RDER)イニシアチブを支援するために開発され、実施された。
本稿では、米国国防総省の現行のミッション・エンジニアリング手法を紹介し、RDERイニシアチブを支援するミッション・エンジニアリング分析に適用するためのアプローチを、想定例を用いて説明する。
キーワード:システム・エンジニアリング、ミッション・エンジニアリング、システムズ・オブ・システムズ、デジタル・エンジニアリング、作戦上の分析
はじめに
米国防総省(DoD)は、システム・エンジニアリングの「ミッション」への応用を重視している。本稿では、ミッション・エンジニアリングの定義と動機、ミッション・エンジニアリング・ガイド第2版(MEG 2.0)に記述されている現在の米国防総省のミッション・エンジニアリング(ME)手法、迅速防衛予備実験(RDER:Rapid Defense Experimentation Reserve)イニシアチブ※を支援するミッション・エンジニアリング(ME)の実施にデジタル・エンジニアリング(DE)がどのように使用されているか、ミッション・エンジニアリング(ME)分析の結果が投資と意思決定プロセスの推進に使用されるさまざまな方法など、米国防総省が現在取り組んでいるミッション・エンジニアリング(ME)の概要を説明する。
※ RDERについて
国防長官は、重要な統合用兵能力(joint warfighting capability)のギャップを埋めるための新しい能力を加速するための構造化された複数年にわたる学習キャンペーンで、複数の国防総省構成要素の実験を拡大する迅速防衛予備実験 (RDER) イニシアチブを設立した。RDER は、統合イノベーションを加速し、将来の用兵コンセプトの開発にフィードバックを提供する。(引用先:https://www.defense.gov/News/Releases/Release/Article/3134979/dod-concludes-industry-engagement-day-for-the-rapid-defense-experimentation-res/)
「RDERは、統合戦闘コンセプト(JWC)を支援する能力の開発を通じて、対等やほぼ対等な敵対者と競争する取組みを推進するもので、これには、火力、指揮・統制、兵站、情報の優位性を推進する能力などが含まれるが、これらに限定されない」-キャスリーン・ヒックス国防副長官(引用先:https://ndia.dtic.mil/wp-content/uploads/2022/future/Wed_Keynote_Beaverson.pdf)
国防総省(DoD)の最新のミッション・エンジニアリング(ME)定義は、「望ましい任務成果を達成するために、現在および将来の作戦上のニーズと能力を分析、デザイン、統合する技術的努力全体を包含する学際的アプローチとプロセス」である[1]。より広義には、システムズ・エンジニアリング知識体系(SEBOK)によれば、「ミッション・エンジニアリングとは、ミッションの計画策定、分析、デザインにシステムズ・エンジニアリングを適用したものであり、ミッションが対象とするシステムであり、ここではミッションはシステムの関心範囲(system of interest)である」[2]。
国防総省(DoD)が最近、システム・エンジニアリングをミッション・エンジニアリング(ME)に適用することに関心を寄せているのは、効果的な防衛システムをエンジニアリングすることが重要である一方で、防衛システムがシステム・オブ・システムズ(SoS)として効果的に連携し、作戦環境に配備されたときに任務成果を達成することも同様に重要である、という米国防総省(US DoD)の認識に基づいている。本稿では、以下の米国防総省の用語と定義を使用する。
ミッション:「目的とともに、取るべき行動とその理由を明確に示す任務。より簡単に言えば、任務は個人または部隊に与えられた責務(duty)である」[3]。
ミッション・スレッド(MT):「与えられたミッション・アプローチのアクティビティ」[4]。
ミッション・エンジニアリング・スレッド(MET):「行為主体、システム、組織に関連するミッション・アクティビティが、特定のミッションの文脈の中でどのように実行されるか」[5]。ミッション・エンジニアリング・スレッド(MET)は「キル・チェーン」や「エフェクト・チェーン」に相当する。
ミッション・アーキテクチャ:「多くのミッション・スレッド(MT)とミッション・エンジニアリング・スレッド(MET)で構成される、織り込まれたエフェクト・ウェブ(キル・ウェブ)」[6]。
ミッション・エンジニアリング(ME):「望ましい作戦上のミッション効果を達成するために、現在および将来の作戦能力およびシステム能力を計画策定、分析、組織化、統合すること」[7]。言い換えれば、ミッション・エンジニアリングには、ミッションの成果を達成するためにシステム・オブ・システムズ(SoS)をデザインし統合することと、シミュレーション環境内の関連するミッションの文脈においてシステム・オブ・システムズ(SoS)がミッションの成果を達成する能力を評価することが含まれる。
図1に示すように、ミッション・エンジニアリング(ME)はエンド・ツー・エンドのミッションを「システム(system)」として扱う。
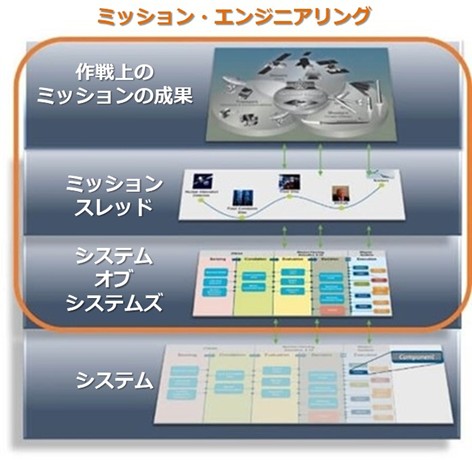
図1. ミッション・エンジニアリングはシステム・オブ・システムとミッションの成果を結びつける |
米国防総省(US DoD)はミッション・エンジニアリング(ME)に関するガイダンスを策定し、ミッション・エンジニアリングの能力、教育、手法に関する実践が広がっている[8] [9] [10] [11] [12]。ミッション・エンジニアリング(ME)は従来、国防ミッションに重点を置いてきたが、ミッション・エンジニアリング(ME)の実践は、例えば災害対応や国境警備など、他の分野にも適用することができる。ジマーマン(Zimmerman)とダーマン(Dahmann)は、ミッション・エンジニアリングが直面する課題をレビューし、ミッション・エンジニアリング(ME)を支援するためにデジタル・エンジニアリング(DE)を利用する事例を提示した。これは米国国防総省(US DoD)のデジタル・エンジニアリング(DE)戦略の最初の焦点であった[13] [14]。
図2に示すように、ミッション・エンジニアリング(ME)は、能力の利害関係者が意思決定に使用できるエンジニアリング結果を提供する手法である。これらの結果には、ミッション成果を達成するためのミッション・アーキテクチャの性能に関する評価指標(metrics)と分析が含まれ、ロバストなモデリングとシミュレーション(M&S)ツールを使用して生成される。この結果は、要件や取得に関する決定への情報提供、ミッション・ギャップに対処するための代替案の評価、技術投資に関する情報提供、開発、プロトタイプ、実験、システム・オブ・システムズ(SoS)エンジニアリングを導くための強化された能力、技術、システム相互依存関係、アーキテクチャの特定などに使用することができ、最終的に参照ミッションを達成し、ミッション能力のギャップを埋めることができる。
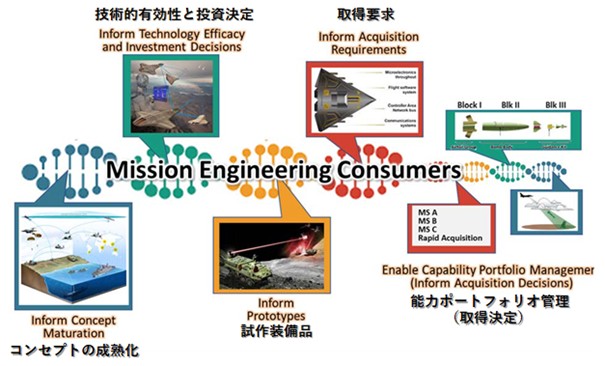
図2. ミッション・エンジニアリング(ME)結果の応用(DoD ME Guide 2.0, 2023, p4) |
ミッション・エンジニアリングの方法論
米国防総省のミッション・エンジニアリング・ガイド第2版(MEG 2.0)は、ミッション・エンジニアリングを実施するための方法論を示しており、これを図3に示す[15]。この節では、この方法論の各ステップについて、想定例とともに説明する。
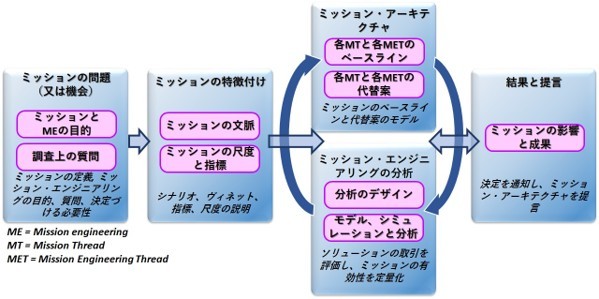
図3. 米国防総省のミッション・エンジニアリング・ガイド第2版(MEG 2.0)のミッション・エンジニアリング方法論 |
ミッションの問題(Mission Problem):ミッション・エンジニアリング(ME)は、ミッション・エンジニアリング(ME)チームが取り組むべき問題を明確に定義し、理解することから始まる。ミッション・エンジニアリング(ME)の問題は、優先シナリオや緊急シナリオのミッション成果に対する積極的な関心に基づいている場合がある。また、ミッションの成果に問題があるとの認識に対する反動が原動力となる場合もあれば、優先ミッションの成功に影響を与える新技術や新技術、あるいは新しい作戦コンセプトの可能性に関心を持つことが原動力となる場合もある。
対処すべき問題によって、ミッション・エンジニアリング(ME)分析のための地理的地域、シナリオ、ビネット、その他のミッションの文脈が決定される。本稿の残りの部分では、本書で説明するミッション・エンジニアリング(ME)手法の例示のために、想定ミッション問題を使用する。想定ミッション問題には、米国がワシントン州においてカナダからの侵攻を防御するシナリオが含まれる。
ミッションの特徴付け(Mission Characterization):ミッションの特徴付けは、対象とする問題の作戦上のミッションの文脈、特にミッション・エンジニアリング(ME)分析の背景となるシナリオとビネットの記述から始まる。これには、エポック(すなわち、シナリオとビネットの舞台となる将来の時間帯)、物理的環境、脅威、青軍のミッション目標、兵力配置、作戦コンセプト(CONOPs)などの要因のほか、ミッションの成功の尺度であるミッションの目標が含まれる。
ミッションの特徴付けは、通常、ミッション・エンジニアリング(ME)チームが作成するのではなく、統合ドクトリン、戦闘軍指揮官(COCOM)作戦計画(OPLAN)、政策、情報コミュニティの評価など、権威ある情報源から引き出される。この情報源は、ベースラインのミッション・スレッド(MT)とミッション・エンジニアリング・スレッド(MET)を表現するのに必要な情報を抽出するために分析される。このミッション・スレッド(MT)とミッション・エンジニアリング・スレッド(MET)は、選択されたシナリオとビネットにおいてミッションを実行するために使用される一連のアクティビティとシステム・オブ・システムズ(SoS)である。
これには、主要ターゲット、各ターゲットと対になるプラットフォームと兵器、監視・偵察アセット、監視・偵察処理ノード、指揮・統制(C2)ノードと役割、通信ネットワーク、システム間の接続性などが含まれる。ミッション・エンジニアリング(ME)チームは次に、これらのデータ要素と関係を利用して、ミッション・エンジニアリング(ME)分析の出発点である基本ミッション・アーキテクチャのモデリングを支援する。
想定されるミッション例は、2040年という時代を舞台にしたカナダの侵攻シナリオであり、以下の3つのビネットで構成されている:
- 紛争の発端となるシアトル空爆は2日間にわたって行われる。
- カナダ地上軍のワシントン州への移動は6日間にわたって行われる。
- シアトル市庁舎を掌握するための地上戦が2週間にわたって行われる。
この例では、ミッション・エンジニアリング(ME)分析では2番目のビネットに焦点を当て、カナダの地上部隊のワシントン州への通過を妨害し、最終的には阻止するという任務を達成するための代替的なミッション・アーキテクチャを評価する。
カナダからワシントン州への地上侵攻があった場合、米北部コマンド(NORTHCOM)がどのように対応するかに関する作戦計画(OPLAN)文書、カナダとの紛争の交戦規則に関する連邦政府の政策文書、およびカナダの計画と能力を説明できる情報機関の情報文書を収集することで、このビネットの米国ミッション・アーキテクチャ(すなわち、システム、兵器、指揮・統制、および通信)を特徴づけることができる。
これらの文書を用いて、ミッション・エンジニアリング(ME)チームはカナダ軍がワシントン州を通過するビネットのミッション成功の尺度を特定する必要がある。この例の場合、ミッション成功の想定指標は、部隊の動員開始から6日後にシアトルに到着したカナダ部隊の割合とすることができ、目標は25%以下とする。
ミッション・アーキテクチャ(Mission Architecture):次に、ミッション・エンジニアリング(ME)チームは、ミッションの特徴付け(mission characterization)から抽出されたデータを利用してベースライン・アーキテクチャ・モデルを開発する。これには、Magic System of systems Architect (MSoSA)のようなモデル・ベースシステム・エンジニアリング(MBSE)ツールを使用して、ベースラインのミッション・スレッド(MT)とミッション・エンジニアリング・スレッド(MET)のデジタル・モデルを作成することと、各軍種、各戦闘軍指揮官(COCOM)、およびミッション・エンジニアリング(ME)の利害関係者からの信頼できるデータを使用して、ミッションのエンド・ツー・エンドのモデリングを完成させるためにデータを追加することが含まれる。本論文の以下の節に例を示す。
ミッション・エンジニアリング(ME)チームは複数のミッション・エンジニアリング・スレッド(MET)を統合して、基本ミッション・アーキテクチャのデジタル表現とし、これを基本アーキテクチャがミッションの成果に及ぼす影響に関する作戦上の分析の青写真として使用する。ベースラインの作戦上の分析が完了し(以下の節を参照)、ギャップが特定されると、ミッション・エンジニアリング(ME)チームはミッション・アーキテクチャ・モデルを更新して、やはり権威ある情報源から、代替的アプローチやコンセプトを組み込む。これらの情報源は、産業界、政府、または専門家のものである。
想定されるカナダの侵攻を例にとると、ベースライン・アーキテクチャには、カナダの地上部隊のワシントン州への通過を妨害するための、米国の地上部隊と航空部隊のセットを含めることができる。これらのアセットは、2040年のエポックで運用可能なプログラムであるべきである。使用される基本アセットに関する文書は、各軍種が提供する戦術・技法・手順(TTPs)文書や、各軍種または他の政府組織が保持するシステム性能データの他のデータ・リポジトリから得ることができる。
カナダの侵攻シナリオを想定した場合、代替アーキテクチャの一例として、高度なセンサー・ペイロードを搭載した自律型無人航空機(UAV)の投入が考えられる。この新しい技術コンセプトは、ベースライン・アーキテクチャの既存システムとともに採用することで、カナダ地上部隊がワシントン州に通過する際に探知する追加的な情報・偵察・監視(ISR)能力を提供することができる。
ミッション・エンジニアリング分析(Mission Engineering Analysis):ミッション・エンジニアリング(ME)チームは、適切な分析環境(通常は作戦上の分析シミュレーション)においてベースライン・アーキテクチャを実装し、選択されたシナリオとビネットにおけるベースラインのミッション成果を評価する。ベースラインのミッション評価指標(mission metrics)と、ミッション成果に影響するギャップや要因の分析を用いて、次に、選択された代替コンセプトや代替能力を示す変更を加えて分析を実行し、代替アーキテクチャのミッションへの影響を評価する。
カナダの侵攻の例を想定すると、米軍の基本アーキテクチャとカナダ軍の敵対脅威は、作戦シミュレーション・ツールでモデル化される。この種のツールの例としては、シミュレーション、統合、モデリングのための高度なフレームワーク(AFSIM:Advanced Framework for Simulation, Integration and Modeling)ソフトウェアやSTK(Ansys Systems Tool Kit)などがある。作戦シミュレーション・モデルは、一連のモンテカルロ実行でシミュレーションされ、これらのシミュレーション実行にわたってミッション評価指標(mission metrics)が計算され、各ミッション評価指標(mission metrics)の平均値と標準偏差が決定される。
この想定例では、最上位のミッション指標(ミッション成功の総合指標)が、シミュレーションの実行全体にわたって計算される。この例では、成功の指標は、カナダ軍が動員されてから6日後にシアトルに到着するカナダ軍の割合であり、目標は25%以下である。次に、ベースラインにおいてミッション目標が達成されなかった場合の能力のギャップを理解するために、追加の評価指標(metrics)を使用する。
これらには、米軍によって探知・識別されたカナダ軍の数(すなわち、ISRの不足があるか)、米軍の兵器発射数、米軍の兵器命中数、米軍の資産によって破壊されたカナダ軍の資産数、カナダ軍によって破壊された米軍の資産数(すなわち、兵器や生存能力の不足があるか)が含まれる。
ベースライン・アーキテクチャについて、これらの評価指標(metrics)とミッション成功の尺度が計算されたら、高度なセンサー・ペイロードを搭載した自律型無人航空機(UAV)の挿入を含む代替アーキテクチャを作戦シミュレーションでモデル化し、別の一連のモンテカルロ実行でシミュレーションすることができる。ISRペイロードを搭載した自律型無人航空機(UAV)の場合、仮説では、代替案はISR画像を向上させ、兵器効果を高め、ミッション成功の可能性を高めることができる。これらのシミュレーション実行を通じて、同じミッション評価指標(mission metrics)とミッション成功の尺度を計算し、仮説の効果が観察され、代替案がミッションの成果を改善するかどうかを評価する。
結果と提言:ミッション・エンジニアリング(ME)チームは、ミッション・エンジニアリング(ME)分析の結果を利用し、ベースライン・ミッションの成果と、代替コンセプトの統合成果を比較し、その結果を分析し、データに基づく勧告を行う。
カナダ軍の侵攻を想定したシナリオでは、ベースラインと代替アーキテクチャで計算されたミッション評価指標(mission metrics)と成功の尺度を比較し、高度なセンサーを備えた自律型無人航空機(UAV)の追加が、カナダ軍のシアトル到達を阻止するというミッション目標に影響を与えたかどうかを評価する。米軍によって検知・識別されたカナダ軍部隊の数や、米軍の兵器命中数などの支援ミッション評価指標(supporting mission metrics)は、自律型無人航空機(UAV)がミッションのどこに影響を与えたかを具体的に知らせるために使用できる。
ミッション・エンジニアリング(ME)方法論の導入
ミッション・エンジニアリング(ME)ガイドはミッション・エンジニアリング(ME)手法の概要を提供している。本節では、図4に示すように、米国国防総省のRDER(Rapid Defense Experimentation Reserve)イニシアチブを支援するために、この方法論がデジタル・エンジニアリング(DE)と作戦上の分析を用いてどのように実施されたかを説明する。その背景として、米国防総省のRDERイニシアチブを支援するミッション・エンジニアリング(ME)の取り組みでは、機密扱いの国防総省のミッション・シナリオに新技術コンセプトを導入した場合のミッションへの影響を評価する。
新技術コンセプトの想定例としては、自律システム、人工知能(AI)および機械学習(ML)アルゴリズム、高度なセンサーや兵器技術などがある。ミッション・エンジニアリング(ME)作業の結果は、新技術コンセプトの開発に情報を提供し、取得と資金調達の決定を支援し、新技術コンセプトの採用コンセプト(CONEMP)を改良するために使用することができる。
前節で紹介したように、想定されるカナダの侵攻シナリオは、米国国防総省RDERイニシアチブに採用されるミッション・エンジニアリング(ME)手法の例示に使用される。先進センサーを搭載した自律型無人航空機(UAV)は、RDERプログラムの技術コンセプト案の想定例となる。この例では、ミッション・エンジニアリング(ME)分析の到達目標は、自律無人航空機(UAV)と高度センサーの追加が、ワシントン州へのカナダの侵攻を阻止するというミッション全体の目標に影響を与えるかどうかを判断することである。
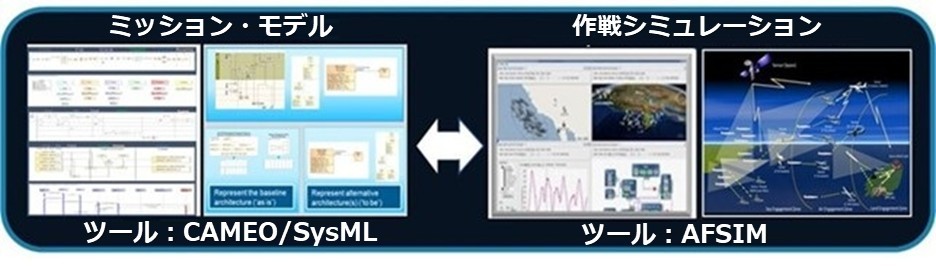
図4. ミッション・エンジニアリングを実施するためのデジタル・エンジニアリングとオペレーション分析の活用 |
このミッション・エンジニアリング(ME)アプローチには、2つの補完的な取り組みが組み込まれている。一方では、モデル・ベースシステム・エンジニアリング(MBSE)Cameo Enterprise Architect(CEA)ツールで開発されたシステム・モデリング言語(SysML)モデルで、ベースラインと代替アーキテクチャのデジタル表現を開発するために、デジタルミッション・エンジニアリング(ME)を適用する。これらのモデルは、統合ドクトリン、各戦闘軍指揮官作戦計画(COCOM OPLAN)、政策、情報コミュニティの評価などの権威あるソース資料に基づいており、統合ミッション・エンジニアリング・スレッド(MET)を含むベースラインと代替アーキテクチャの透明で明確なモデルを提供する。
ベースライン・アーキテクチャは、与えられたミッション・シナリオで採用される統合ミッション・エンジニアリング・スレッド(MET)の選択されたセットを表し、比較のための標準的な基準として使用される。上記の節で紹介した想定カナダの侵攻シナリオでは、カナダ軍のワシントン州への侵入を阻止するために、国防総省全体で使用されている標準的な目標発見(Find)、対象特定(Fix)、追跡(Track)、ターゲット設定(Target)、交戦(Engage)、効果評価(Assess)(F2T2EA:Find、Fix、Track、Target、Engage、Assess)ミッション・スレッド(MT)が採用される。この例では、F2T2EAのミッション・スレッド(MT)の一部として実施されるアクティビティは、2040年にカナダ軍のワシントン州への通過を阻止するために採用される米軍に割り当てられる。このシナリオでは、F2T2EAのミッション・スレッド(MT)のアクティビティを特定の米軍システムに割り当てることがミッション・エンジニアリング・スレッド(MET)を構成する。この想定シナリオのミッション・エンジニアリング・スレッド(MET)の一例は以下の通りである。
・ 目標発見(Find):ボーイングRC-135のような既存の空中ISRプラットフォームが潜在的なターゲットを検知する。
・ 対象特定(Fix):地上のISR処理ノードがRC-135から潜在的目標情報を受信。ISRアナリストは、ロッキードU-2のような別の空中プラットフォームがターゲットの画像を収集するように合図を出す。ISRアナリストは、ターゲットの画像により、ターゲットがカナダ部隊護衛する戦車旅団であることを確認する。
・ 追跡(Track):RC-135は戦車旅団の監視を続け、地上の米陸軍指揮所にその位置の最新情報を提供する。
・ ターゲット設定(Target):指揮所に座っているターゲッティング特技者が兵器とターゲットのペアリングを行う。彼らは戦車旅団と交戦するため、陸軍戦術ミサイルシステム(ATacMS)を搭載したM142高機動砲ロケットシステム(HIMARS)を選択する。指揮所にいる指揮官は、HIMARSのオペレーターに戦車旅団に向けてATacMSを発射するよう命じる。
・ 交戦(Engage):HIMARSオペレーターは攻撃命令の受信を確認し、戦車旅団に向けてATacMSを発射する。
・ 効果評価(Assess):指揮所の指揮官はHIMARSオペレーターから確認を受け、U-2に戦車旅団のバトル・ダメージ・アセスメント(BDA)データを収集させる。ISR処理ノードにいるアナリストは収集したデータを評価し、交戦が成功したかどうかを判断する。指揮官はアナリストのバトル・ダメージ・アセスメント(BDA)レポートを使用し、後続行動が必要かどうかを判断する。
想定されるカナダの侵攻シナリオでは、F2T2EAのミッション・スレッド(MT)のさまざまなアクティビティを実行するために、さらに多くの感知システムと交戦システムが使用される可能性がある。これらのアクティビティを行うシステムのユニークな組み合わせがそれぞれミッション・エンジニアリング・スレッド(MET)を構成し、これらすべてのミッション・エンジニアリング・スレッド(MET)の統合がベースラインのミッション・アーキテクチャを構成することになる。
代替アーキテクチャは、ベースラインのミッション・エンジニアリング・スレッド(MET)に1つ以上の新技術コンセプトを統合したものである。モデルは、各軍種の専門家や権威ある資料の作成者とともにレビューされ、ミッション・アーキテクチャの有効な表現についてコンセンサスが得られるまで、繰り返し修正される。上記の節で紹介したカナダの侵攻シナリオを想定した場合、代替アーキテクチャとしては、高度な撮影センサーを搭載した新しい自律型無人航空機(UAV)をベースライン・ミッション・アーキテクチャに統合し、自律型無人航空機(UAV)のミッション・アクティビティを捕捉するために必要な変更に応じてF2T2EAアクティビティを修正することが考えられる。
F2T2EAのミッション・スレッド(MT)の文脈では、自律型無人航空機(UAV)は、目標発見(Find)、追跡(Track)、効果評価(Assess)のステップをサポートするアクティビティを実行することができる。これらのミッション・アーキテクチャは作戦シミュレーションで実装され、デモンストレーション、実験、作戦上の配備、試験イベントのデータに基づいてミッションの実行を動的に表現し、ベースライン・アーキテクチャと代替アーキテクチャのミッション成果を評価する。
作戦シミュレーションは、ベースラインと代替アーキテクチャの間で比較可能なミッション評価指標(mission metrics)を出力し、代替案のミッションへの影響を評価する。カナダの侵攻を想定したシナリオでは、高度なセンサーを搭載した自律型無人航空機(UAV)を追加することで、米国がワシントン州へのカナダの侵攻を阻止する能力にどのような影響を与えたかを評価するために、作戦シミュレーションの出力を使用する。
RDERイニシアチブをサポートするために使用されるデジタル・ミッション・エンジニアリング(digital ME)モデリングのワークフローを以下の図5に示す。

図5. ミッション・エンジニアリング(ME)モデリングのワークフロー |
ミッション・アーキテクチャのモデリング
ミッション・アーキテクチャ・モデルの開発は、ミッション・エンジニアリング(ME)分析に関連するベースラインのミッション・スレッド(MT)のモデリングから始まる。ミッション・スレッド(MT)は、ミッションを実行するためのタスク、アクティビティ、およびイベントのエンド・ツー・エンドのシーケンスである。ベースラインのミッション・スレッド(MT)は、ミッションの特徴付け(mission characterization)に収集したデータから特定でき、ミッション・スレッド(MT)の主要なアクティビティは、ドクトリン、主題の専門知識、および、その他の権威ある情報源の集大成から導き出すことができる。
RDERイニシアチブでは、図6に示すように、ベースラインのミッション・スレッド(MT)をシステム・モデリング言語(SysML)アクティビティ・ビューとしてデジタル表示した。図6のアクティビティ・ビューは、ベースラインのミッション・スレッド(MT)の例における一連のアクティビティを高レベルで描写することを意図している。今回使用したMT例は、国防総省全体で一般的に使用され、参照されているF2T2EAのミッション・スレッド(MT)である。

図6. F2T2EAベースラインのミッション・スレッド(MT)デジタル表示の図 |
このスレッドに含まれるアクティビティの種類を説明するために、F2T2EAMTの「対象特定(Fix)」ステップのアクティビティの拡大図を図7に示す。

図7. ベースラインF2T2EA MTデジタル表現における対象特定(Fix)段階の詳細図 |
ミッションの特徴付け(mission characterization)中に収集された同じデータを使用して、ベースラインのミッション・スレッド(MT)アクティビティをミッション・シナリオで使用されるシステムや組織に割り当てることができる。ミッション・エンジニアリング・スレッド(MET)(すなわち、「キル・チェーン」)とは、「ミッションのタスクやアクティビティを実行するために必要とされ、利用される能力やシステムの技術的詳細を含むミッション・スレッド(MT)」のことである[16]。ミッション・シナリオで使用されるシステムや組織によっては、ベースラインのミッション・スレッド(MT)のミッション・アクティビティや順序をベースラインのミッション・エンジニアリング・スレッド(MET)用に調整する必要がある場合がある。
ミッション・エンジニアリング・スレッド(MET)は、さまざまな種類のシステム・モデリング言語(SysML)ビューを使用してデジタルで表現できる。以下の図は、想定上のカナダの侵攻シナリオのF2T2EAのミッション・エンジニアリング・スレッド(MET)のコンテキストでの例をいくつか示している。図8は、ベースラインのF2T2EAのミッション・エンジニアリング・スレッド(MET)のアクティビティ・ビューである。ここでは、F2T2EAのミッション・アクティビティが、想定上のカナダの侵攻シナリオのベースラインのシステムおよび組織に合わせて調整され、スイム・レーン内に割り当てられている。図9は、ミッション・エンジニアリング・スレッド(MET)で使用されるベースラインのシステム・セットの論理的なシステム間接続を示す内部ブロック・ダイアグラム(IBD)ビューである。図10は、ベースラインのミッション・エンジニアリング・スレッド(MET)の1回の実行を通じてシステム間で行われるデータ交換のシーケンスを示すシーケンス・ビューである。
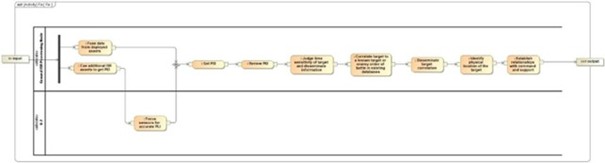
図8. 想定されるカナダの侵攻シナリオにおけるベースラインF2T2EAのミッション・エンジニアリング・スレッド(MET)の対象特定(Fix)段階のスイム・レーン内のシステムへのアクティビティ割り当てを示すアクティビティ・ビュー |

図9. 想定されるカナダの侵攻シナリオにおけるベースラインF2T2EAのミッション・エンジニアリング・スレッド(MET)の論理システム接続を示す内部ブロック・ダイアグラム(IBD)ビュー |
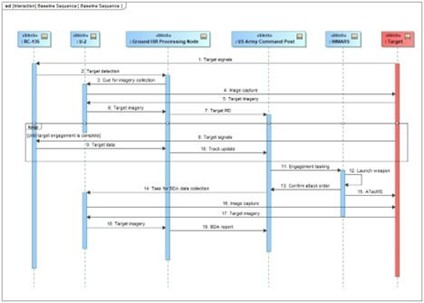
図10. 想定されるカナダの侵攻シナリオにおけるベースラインF2T2EAのミッション・エンジニアリング・スレッド(MET)のデータ交換を示すシーケンス図 |
ほとんどのミッションでは、図11に示すように、複数のミッション・エンジニアリング・スレッド(MET)が実装され、同時に実行される。これらのミッション・エンジニアリング・スレッド(MET)の統合がミッション全体のアーキテクチャ(すなわちキル・ウェブ)を構成する。

図11. ミッション・アーキテクチャ/キル・ウェブへのミッション・エンジニアリング・スレッド(MET)/キル・チェーンの統合 |
ベースラインのミッション・エンジニアリング・スレッド(MET)はベースラインのミッション・アーキテクチャを形成し、代替的なアプローチやコンセプトを比較し、作戦環境に適合させるための基礎となる。図12、図13、図14に示されるように、ベースラインのミッション・エンジニアリング・スレッド(MET)モデルは、ミッションの成果を向上させる意図で、ベースライン・アーキテクチャに新しい技術コンセプトを挿入する代替ミッション・エンジニアリング・スレッド(MET)モデルを表現するために更新される。
このような新しいコンセプトを挿入することで、ミッションの遂行に使用されるアクティビティ、アクティビティの順序、システム、および/またはシステムの接続性が変更される可能性がある。新コンセプトを提案するチームは、ミッション・エンジニアリング(ME)にとって重要なミッションの文脈を認識していないことがよくある。
以下の図は、カナダの侵攻シナリオを想定した場合の変化を示しており、代替アーキテクチャには、高度な画像センサーを備えた新しい自律型無人航空機(UAV)追加されている。
|
図12. カナダの侵攻想定シナリオにおける代替F2T2EAのミッション・エンジニアリング・スレッド(MET)の対象固定(Fix)ステップのスイム・レーン内のシステムへのアクティビティ割り当てを示すアクティビティ・ビュー |
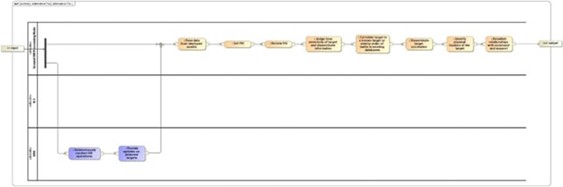
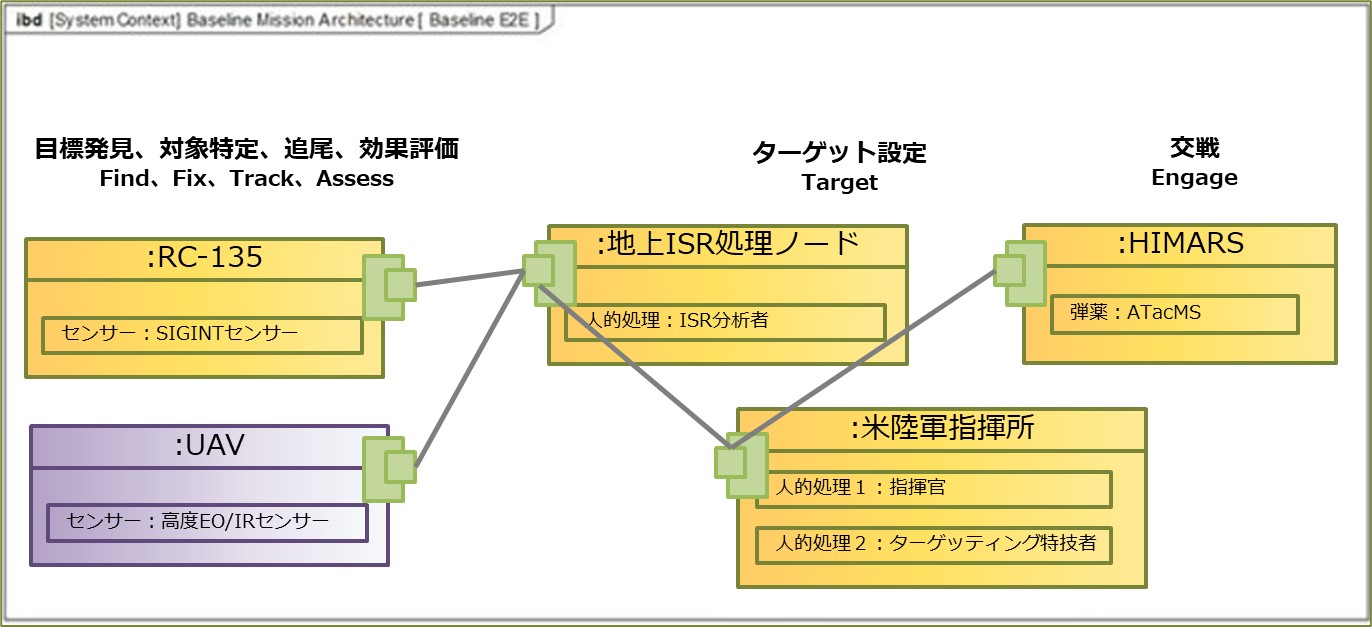
図13. 想定されるカナダの侵攻シナリオにおける代替F2T2EAのミッション・エンジニアリング・スレッド(MET)の論理システム接続を示す内部ブロック・ダイアグラム(IBD)ビュー |
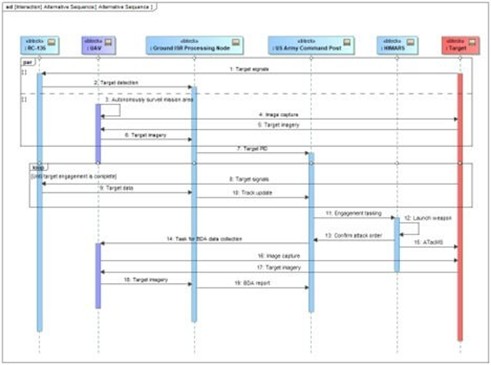
図14. 想定されるカナダの侵攻シナリオにおける代替F2T2EAのミッション・エンジニアリング・スレッド(MET)のデータ交換を示すシーケンス図 |
ベースラインと代替のデジタルミッション・アーキテクチャのシステム・モデリング言語(SysML)ビューは、図15に示すように、モデル開発のMITREの共有モデリング・フレームワークを使用して、モデル・ベースシステム・エンジニアリング(MBSE)ツールのCameo Enterprise Architect(CEA)を使用して実装される[17]。

図15. MITRE共有モデリング・フレームワーク |
再利用性をサポートするために開発されたこのフレームワークは、3層の抽象化されたモデリングを含んでいる。基礎となる「シード・モデル」には、共通要素のデジタル表現が含まれ、これは空中や地上のプラットフォームなど、一般的なシステムの青写真である。次の層は「ベース・モデル」で、共通な要素を使用してRC-135やHIMARSなどの詳細なシステムを指定する。
これらの詳細なシステムは、フレームワークの第3層である様々な「ミッション・モデル」において、ミッションを実行するシステム・オブ・システムズ(SoS)を構成するためのビルディングブロックとして使用される。ベース・モデルには、米国防総省のミッション・エンジニアリング(ME)研究で使用されるトップ・レベルのミッション・スレッド(MT)も含まれる。このミッション・スレッド(MT)は、米国防総省の統合標的ミッションの実行に必要な一般的アクティビティをキャプチャしたもので、各ミッション・モデルに再利用して調整することができる。その結果、ミッション・モデルは、新たなミッション・エンジニアリング(ME)アクティビティにおけるミッション・アーキテクチャのベースラインと代替ミッション・スレッド(MT)、ミッション・エンジニアリング・スレッド(MET)を把握することができる。
フレームワーク・モデルは、ドクトリン、米軍の専門家、その他の権威あるデータ・ソースを利用して作成される。ミッション・モデルで定義されたミッション・アーキテクチャは、具体的な分析のための作戦シミュレーションやツールに反映される。RDER ミッション・エンジニアリング(ME)アプローチでは、ミッション・エンジニアリング・スレッド(MET)モデルは、本論文の次の節で述べるように、作戦シミュレーションにおけるシステム性能と振る舞いを含むミッション・アーキテクチャの実装のための青写真を提供する。
共有モデリング・フレームワークで表現されたミッション・モデルは、各ミッション・エンジニアリング(ME)実施の具体的な到達目標に対応するために選択された分析ツールでインスタンス化され、ミッション・エンジニアリング(ME)アクティビティのアーキテクチャ製品を構成する。これらのミッション・モデルは、選択した分析ツールにおける特定のインスタンス化(例えば、シミュレーション・スクリプトへの組み込み)とは別に、アーキテクチャの曖昧性のない、アクセス可能なデジタル表現を表す。ミッション・モデル(MTとミッション・エンジニアリング・スレッド(MET))のデジタル表現の価値は、特定の分析ツールやアプローチに依存することなく、ミッション・エンジニアリング(ME)アクティビティ全体にわたって一貫性のある再利用可能なミッション・アーキテクチャを迅速に生成できることである。
オペレーション・ミッション分析
作戦上の分析はミッション・エンジニアリング(ME)の鍵であり、ミッションの成果を定量的に評価するものである。ミッション・エンジニアリング(ME)は、与えられた問題に対して適切なモデリングと分析ツールを使用する。上述したように、ミッション・モデルに取り込まれたデジタル・ベースラインと代替MTおよびミッション・エンジニアリング・スレッド(MET)は、作戦上の分析のための青写真を提供する。
ミッション・エンジニアリング(ME)分析を実施するため、ミッション・エンジニアリング(ME)チームはモデリング・シミュレーション・ツールを使用して、分析のための作戦状況におけるベースラインを表現し、作戦シミュレーションからベースライン・ミッション評価指標(mission metrics)を生成する。これには、選択した地理的地域での作戦展開、脅威表現、システム性能と振舞い、通信など、目下の問題に関連する作戦上のミッションの文脈の表現が含まれる。ベースライン分析には通常、ギャップやミッション結果に影響を与える要因の分析が含まれる。このベースラインは、ミッション・エンジニアリング(ME)分析の動機付けとなったミッション・エンジニアリング(ME)問題の定量化に役立つことが多い。
定量化されたベースラインのミッション評価指標(mission metrics)とギャップは、代替アーキテクチャに導入される新しいコンセプトや能力を評価するための基礎となる。上述したように、デジタルミッション・アーキテクチャは、各代替案のアーキテクチャの変更を定義するためのコンテキストを提供する。ミッション・エンジニアリング(ME)チームは、各新コンセプトと代替アーキテクチャを、ベースラインの作戦上の分析モデルに対する変更点として表現する。
その後、チームは更新されたモデルを使用して、シナリオで表現された各コンセプトの性能と、全体的なミッション成果への影響に関する評価指標(metrics)を計算する。作戦シミュレーションにおいて、代替コンセプトがミッション全体の成果に与える影響は、コンセプトの開発、獲得、試験、および/または採用に関する勧告の原動力となる。場合によっては、新技術のコンセプトを試作し、演習や実験で実施し、収集したデータを用いて作戦シミュレーションの結果を検証することもある。
各新コンセプトを評価するために、チームは条件を変えた一連のケースで構成されるラン・マトリックスを開発する。シナリオの条件を変化させることで、チームはコンセプトのさまざまな側面のパフォーマンスを評価し、コンセプトによってもたらされる各変化の原因と結果を切り分け、コンセプトの動作条件にまつわる感度分析(sensitivity analysis)を行うことができる。ミッション・エンジニアリング(ME)分析のラン・マトリックスの例を図16に示す。
|
図16. ミッション・エンジニアリング分析の実行マトリックス例 |

ラン・マトリックスは、以下のような質問によって進められる。
・ ベースラインのケースにおいて、ミッションはどのように遂行されるのか(ミッション評価指標(mission metrics)と支援評価指標(supporting metrics))。
・ 新しいコンセプトは、(ミッション・エンジニアリング・スレッド(MET)の枠を超えて)シナリオの中でどのように実行されるのか?
・ コンセプトの目標は何か(例:ISRカバー率の向上、兵器の増加、プラットフォームの生存性)?ミッション評価指標(mission metrics)と支援評価指標(supporting metrics)にどのような影響を与えることが期待されるか?
・ どのような状況下で、このコンセプトがミッションの成果に影響を与えると予想されるか(通信環境の悪化など)。
・ ベースライン・システムに対するコンセプトの依存関係は?
・ コンセプトの各コンポーネントのパフォーマンスは?
作戦シミュレーションのデータは、まず全体的な成功の尺度と、それを支援ミッション評価指標(supporting mission metrics)を算出し、基本的なミッションの成果と課題を評価するために用いられる。カナダの侵攻を想定したシナリオでは、成功の尺度はカナダ軍がシアトルに到達した割合であり、米軍の目標はカナダ軍の75%以上を阻止することである。支援ミッション評価指標(supporting mission metrics)としては、米軍に発見・識別されたカナダ兵力数、米軍の兵器発砲数、米軍の兵器命中数、米軍によって破壊されたカナダ兵力数、カナダ兵力によって破壊された米軍兵力数を挙げることができる。
図17、図18、および図19は、ミッション・シナリオにおける潜在的な長所と短所を素早く特定するのに有用な、これらの支援ミッション評価指標(supporting mission metrics)の視覚的表現である。例えば、図17は、米国(すなわち「ブルー」)のアセットがシナリオで使用可能な兵器をすべて消費していないことを示している。これにはいくつかの原因が考えられる。ひとつは、米軍アセットが使用可能な兵器をすべて発射するのに十分な照準データを受信していない可能性である。
もう1つの可能性は、米軍アセットが使用可能な兵器の数が目標数よりも多いため、使用可能な兵器をすべて使用する必要がないというものである。しかし、図19は、敵の目標数が交戦の成功数よりも多いことを示しているため、兵器の支出が限られている2つ目の可能性は否定できる。兵器使用制限の真の原因を理解するためには、追加のミッション評価指標(mission metrics)を検討する必要がある。
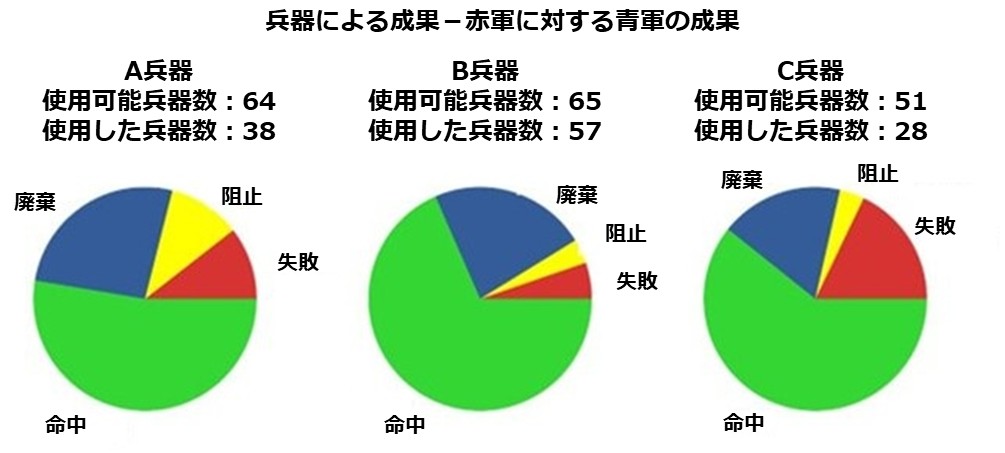
図17. ミッション評価指標(mission metrics)の例: 米国兵器の兵器成果 |
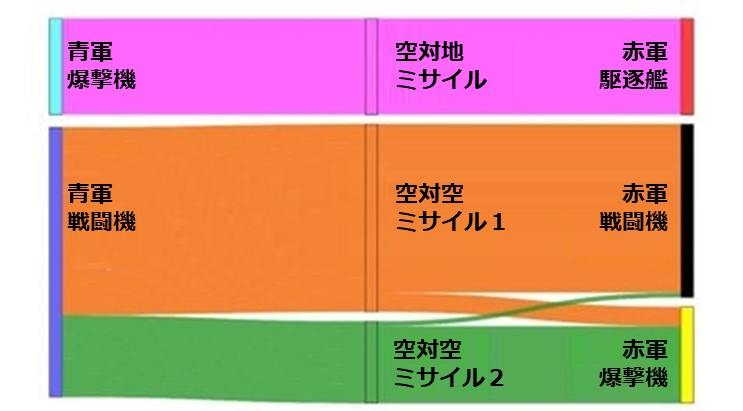
図18. ミッション評価指標(mission metrics)の例: 敵対者のターゲットに対する米軍の交戦成功率 |
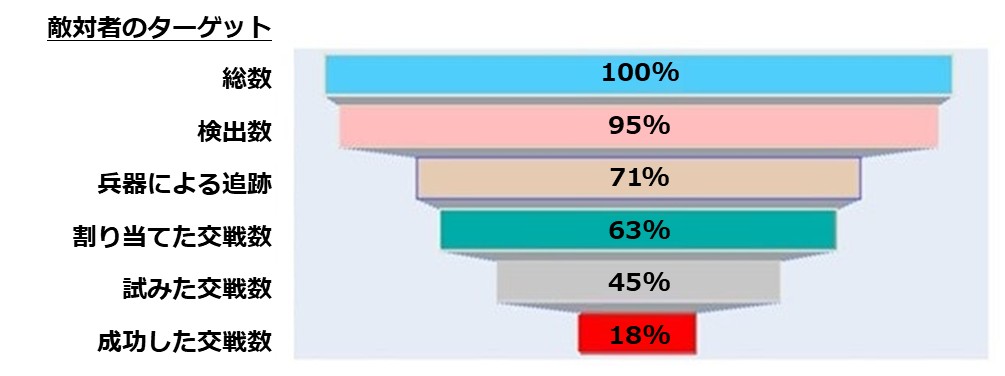
図19. ミッション評価指標(mission metrics)のまとめ:敵対者のターゲットの総数、敵対者のターゲットの検出数、敵対目標の兵器品質追跡、割り当てられた交戦、試行された交戦、および成功した交戦。 |
次に、ミッション・エンジニアリング(ME)分析で扱った問題の作戦状況を反映した選択条件下で、代替ミッション・アーキテクチャを作戦シミュレーションで実行し、その結果得られたミッション評価指標(mission metrics)と成功の尺度を用いて、新しいコンセプトがミッションの成果に与える影響を評価する。
図17、図18、図19に示す例のように、結果を視覚的にプロットすることで、結果を左右する評価指標(metrics)を理解することができる。ベースラインと代替案の結果を比較することで、代替案の影響を示し、代替アーキテクチャがミッションに与える影響の根本原因を特定することができる。その結果、ミッションの成果に対する影響は、提案されたコンセプトに関する勧告の根拠となる。
カナダの侵攻のシナリオを想定した場合、自律型無人航空機(UAV)を導入した代替ミッション・アーキテクチャで起こりうるミッション結果は、自律型無人航空機(UAV)のセンサーによる画像処理能力の追加は、ベースライン・アーキテクチャのU-2がすでに提供している能力と冗長であるため、ミッション全体の成功には影響を与えないというものである。このような発見は、作戦シナリオにおけるミッションへの影響という観点から代替案を評価するというミッション・エンジニアリング(ME)分析の強みを実証するものである。システムが正しく構築されているかどうかの検証に焦点を当てるのではなく、ミッション・エンジニアリング(ME)はミッションの成功を達成するために正しいシステムを構築することに焦点を当てるのである。
まとめ
本稿で紹介するように、米国防総省のミッション・エンジニアリング(ME)フレームワークは、新技術のコンセプトや能力がミッションに与える影響を評価するための規律あるアプローチを提供する。MTとミッション・エンジニアリング・スレッド(MET)で構成されるデジタルミッション・アーキテクチャは、関心のあるシナリオとビネットを選択して開発され、作戦シミュレーション・モデルの青写真を提供する。MT/ミッション・エンジニアリング・スレッド(MET)はベースライン・ミッション・アーキテクチャを表現するために使用され、ミッションの文脈と比較の基礎を提供する。
さらに、ミッションの成果を向上させることを目標に、提案されたコンセプトや能力を基本アーキテクチャに挿入する代替ミッション・アーキテクチャによって表現することもできる。MT/ミッション・エンジニアリング・スレッド(MET)を表現するためにデジタル・エンジニアリング(DE)を使用することで、ミッション・システムのモデル、アクティビティ、およびアーキテクチャの明確性、透明性、および再利用性を確保することができる。ミッション・エンジニアリング(ME)作戦上の分析は、代替ミッション・アーキテクチャを評価し、それらが導入する新コンセプトのミッションへの影響を評価するために、運用環境におけるベースラインの評価指標(metrics)を表現する。
ミッション・エンジニアリング(ME)アクティビティの原動力となるミッションの問題に基づき、ミッション・エンジニアリング(ME)作戦上の分析は、技術投資、新しい作戦コンセプトの導入、新技術の導入、システムに対する新たな要件、またはミッション成果の改善に関するその他の意思決定に対処するため、ミッション評価指標(mission metrics)の観点から定量的結果を出力する。
ミッション・エンジニアリングは、有効な想定と信頼できるデータの使用に依存するものであり、これは実施全体を通じて扱われる。ミッションの特徴付け(mission characterization)は、信頼できるシナリオとデータに基づくものである。これには、脅威と、その脅威の中でのミッション遂行に関する信頼できるデータの両方が含まれ、インテリジェンスの推定値、作戦計画、テスト結果や請負業者の検証済み仕様から得られたシステム性能データが活用される。こうした任務の複雑さ、デジタル・モデルと運用シナリオの両方で収集・使用されるデータを考慮し、知識豊富な個人や利害関係者との反復レビューを実施し、エンジニアリングと分析の目的に対してデータが適切に使用されていることを確認する。
ミッション・エンジニアリングの成熟が進むにつれて、試験・評価コミュニティとの協力の機会が特定されつつある。試験・評価(T&E)データは現在、ミッション・エンジニアリングのモデリングを支援するために使用されており、ミッション・エンジニアリング分析は、コンセプトのミッションへの影響に関する評価指標(metrics)を試験・評価(T&E)と共有している。米国国防総省が、国防総省の研究、開発、および取得においてミッションの視点を優先させる方向へ進み続けているため、この協力関係は拡大することが予想される。
ノート
[1] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[2] R. Giachetti, “Mission Engineering, Systems Engineering Body of Knowledge,” https://www.sebokwiki.org/wiki/Mission_Engineering. (Accessed 5 9 2024).
[3] US Department of Defense. Joint Publication 3-0 Joint Operations. 11 August 2011.
[4] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[5] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[6] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[7] US Department of Defense. Defense Acquisition Guidebook. 16 September 2013.
[8] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[9] R. Giachetti, “Mission Engineering, Systems Engineering Body of Knowledge,” https://www.sebokwiki.org/wiki/Mission_Engineering. (Accessed 5 9 2024).
[10] Hutchison, N.A.C., S. Luna, W.D. Miller, H.Y. See Tao, D. Verma, G. Vesonder, and J. Wade. 2018. “Mission engineering competencies.” Proceedings of the American Society for Engineering Education (ASEE) Annual Conference and Exposition, vol. 2018.
[11] Van Bossuyt, D.L., P. Beery, B.M. O’Halloran, A. Hernandez, E. Paulo. 2019. “The Naval Postgraduate School’s Department of Systems Engineering approach to mission engineering education through capstone projects.” IEEE Systems 7(3): 38.
[12] Beam, D.F. 2015. Systems engineering and integration as a foundation for mission engineering. Monterey, CA, USA: Naval Postgraduate School; Beery, P., E. Paulo. 2019.
[13] Zimmerman, P and J Dahmann. Digital Engineering Support to Mission Engineering. 21st Annual National Defense Industrial Association Systems and Mission Engineering Conference. October 2018.
[14] “Application of Model-Based Systems Engineering Concepts to Support Mission Engineering.” IEEE Systems. 7(3): 44; Dahmann, J. Keynote Address: “Mission engineering: System of systems engineering in context.” Proceedings of the IEEE System of Systems Engineering Conference, 19–22 May 2019, Anchorage, AK, USA.
[15] US Department of Defense. Mission Engineering Guide 2.0. October 2023.
[16] Pennock, M.J., Driscoll, G.I., Dahmann, J.S., Adams, M. 2022. “Enabling Mission Engineering through a Reusable Digital Engineering Environment.” 2022 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 2022, pp. 1-8.
[17] Pennock, M.J., Driscoll, G.I., Dahmann, J.S., Adams, M. 2022. “Enabling Mission Engineering through a Reusable Digital Engineering Environment.” 2022 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 2022, pp. 1-8.

