目に見えないものは手にも打てない -作戦を成功させるためのAI戦術の出現- (Defense AI Observatory)
先に掲載の「戦場におけるフリー・ジャズ -GhostPlayのAIアプローチはどのように防空を強化するか- (Defense AI Observatory)」に続いて、GhostPlayのプロジェクトで行われている「戦場におけるAI戦術の役割」を取り上げた白書3部作の2番目の論文を紹介する。この論文では、ドローンのスウォームを活用した戦術の案出に人工知能を活用する取組みが述べられている。AIを活用して戦力開発をするためのインフラストラクチャとしてデジタル環境の構築が大前提であることに注目してほしいところである。論文中にAir Littoralという用語が出てくるが、本拙訳では、「Air Littoralについて、ここでは「沿空域」とした。Littoralだけだと「沿岸」と訳し、海、湖、川などの岸に沿った水域という陸地と水面の水平方向への狭い帯域を示す意味がある。Air Littoralは、陸地と空域の垂直方向に見た場合の陸上に極めて近い帯域を示すといわれる」とした。(軍治)
![]()
目に見えないものは手にも打てない
沿空域(Air Littoral)※1での作戦を成功させるためのAI戦術の出現
His Hands Can’t Hit What His Eyes Can’t See
Emergent AI Tactics for Successful Operations in the Air Littoral
※1 Air Littoralについて、ここでは「沿空域」とした。Littoralだけだと「沿岸」と訳し、海、湖、川などの岸に沿った水域という陸地と水面の水平方向への狭い帯域を示す意味がある。Air Littoralは、陸地と空域の垂直方向に見た場合の陸上に極めて近い帯域を示すといわれる。
Heiko Borchert and Christian Brandlhuber
DAIO Study 24|26
1. まとめ
量(mass)だけでは敵対者を圧倒するには不十分である。これが本稿の核心的なメッセージである。しかし、待ってほしい。「量はそれ自身の質である(quantity is a quality of its own)」というナラティブを批判する人たちが早合点する前に、ニュアンスと文脈の両方を把握して、我々が言いたいことを十分に理解しなければならない。
「量が重要(mass matters)」運動の重要な問題のひとつは、敵対者が戦場で発言権を持つことである。例えば、多数の無人システムによる攻撃に対して敵対者がどのように対応するかは、遭遇戦の結果を非常に大きく左右する。しかし、対応は一方通行ではない。第一ラウンドの対抗措置に対して攻撃者がどのように反応するかによって、彼らが任務を達成できるかどうか、またどの程度達成できるかが大きく左右される。そのため、量(mass)が決定的かどうか、どのように、そしていつ決定的となるのか、また攻撃対防御のゲームがどのように展開されそうかを計るためには、コンセプトと能力開発に対する異なるアプローチが必要となる。
この新しいアプローチを開発し、実施することが、ドイツ陸軍コンセプト・能力開発センター(ACCDC)と協力して実施した先進コンセプト研究「ワイルド・ホーネッツ(Wild Hornets)」※2の核心である。我々は過去1年半の間、攻撃ヘリや輸送ヘリを操縦する陸軍の飛行士が、敵対する地上配備型防空(GBAD)コンステレーションを識別して無力化するために、いわゆる空中発射効果(ALE)をどのように利用するのが最も効果的かを分析してきた。この目的のために、我々は戦場のバーチャル・ツインである高忠実度の防衛メタバースを開発した。防衛メタバースは、航空発射効果(ALE)と地上配備型防空(GBAD)システム、および関連するセンサーとエフェクターの間の相互作用をデジタル的にモデル化し、シミュレートするために、任務に関連する関心領域のすべてのパラメータを複製する。
※2 ワイルド・ホーネッツ(Wild Hornets)は野生のスズメバチの意。ここでは「CO CF Wild Hornets」を指し、ウクライナの非営利慈善団体で、ロシアのウクライナ侵攻と戦うウクライナ軍のために戦闘および支援用ドローンを製造することを目的としている。2023年春、分離大統領旅団の対戦車部隊に所属するエンジニアによって創設されたWild Hornetsのドローンは、ウクライナ軍と情報総局(ウクライナ)の複数の部隊で使用されている。同グループは、FPV重爆撃機「クイーン・ホーネット」、対空FPVドローン「スティング」、「ワイルド・ドラゴン」(そのコンセプトは同じ名前のスチール・ホーネッツ社によって開発された)の製造など、ウクライナ側のためにいくつかの革新的なドローンシステムを開発したことで脚光を浴びるようになった。同グループはまた、自動兵器やロケットランチャーを取り付けた実験的なドローンを撮影しており、人工知能機能を備えたFPVドローンをすでに実戦投入していると主張している。他のウクライナのメーカーとは異なり、ワイルド・ホーネッツは企業ではなく非営利団体であり、国からの資金援助ではなく民間からの寄付に頼っている。
我々の防衛メタバースは、カウンタープレイ(counterplay)※3の論理と力学を使用して、赤と青の部隊を相互作用させる。これは、軍事コンセプトの開発者が、将来の軍事システムのさまざまな構成要素が提供するかもしれない戦術的付加価値を十分に理解する唯一の方法である、と我々は主張する。さらにこのアプローチは、知的な敵との相互作用において、人工知能(AI)が複雑な戦術行動を自己学習できることを示す。これは、既存の技術をAIで改良するという現在のパターンを超えて、コンセプトと技術の限界を押し広げるものである。AI戦術は、相手を奇襲し優位に立つために、戦場での斬新な行動への扉を開く。
※3 カウンタープレイ(counterplay)とは、チェスの用語で反撃の意、優位にある対戦相手に対し、盤面の新たな位置から反撃を仕掛けること
したがって、重要なのは量(mass)ではなく、スマートな量(smart mass)であり、AIの戦術がスマートさを形成する。我々が実証しているように、無人システムの偵察・打撃スウォームのメンバー間の自己学習された協調した調整は、戦争の原理を活用し、大きな飛躍をもたらす。このアプローチは、現在のスウォームのコンセプトをはるかに超えている。従来、スウォームのメンバーは事前に計画された飛行軌道を実行し、比較的単純なルールを使用して、互いから距離を保ち、隊形を維持し、あるいは初歩的な協力パターンを実行していた。対照的に、我々のアプローチは、敵対的な防空態勢を圧倒するために、分散制御を使用して、スウォームのメンバー間の協力を促進する。つまり、各スウォームのメンバーは自身の到達目標に従い、チームメイトと協力する方法を学習する。その結果、協力は個々の利益分析の関数となる。個々の目標をあきらめることで、より価値の高い共通の到達目標を達成できるのであれば、スウォームのメンバーは協力する。
これらの知見は、自己学習型の協調した調整を可能にするAI戦術として、軍事パフォーマンスを新たなレベルへと押し上げる。
- これは、地上配備型防空(GBAD)コンステレーションと交戦するために必要な航空発射効果(ALE)の数が少なくて済むため、効率が向上する。つまり、一定の数の無人アセットで、より多くのターゲットを攻撃できる可能性がある。
- 航空発射効果(ALE)スウォームが任務の要求に応じて任務のテンポを調整し、地上配備型防空(GBAD)の「デッド・ゾーン(dead zone)」に潜り込んで効果的な交戦を行うために低速でゆっくりとした飛行経路を選択できるようにすることで、有効性を向上させる。
- スウォームのメンバー間でタスクやサブタスクを定義し、戦役速度(campaign speed)で委譲することで、予期せぬ敵対者の動きに即座に対応する能力として、出現が解き放たれる。
これらの成果は、「ワイルド・ホーネッツ(Wild Hornets)」の核心的な関心事である沿空域(air littoral)での任務にとって最も重要である。この小さな空域は、ますます紛争が激化している。陸上部隊の「上空からの防護(protection from above)」を確保すると同時に、あまりにも多くの場合、青空作戦にしか焦点を当てない航空戦力を提供するためには、沿空域(air littoral)地帯のコントロールが不可欠である。本稿で取り上げるAIの戦術は、わずか4、5機のチームメンバーからなる非常に小さなスウォームでさえ、ゲパルト・システム(Gepard system)のような強力な砲ベースの短距離地上配備型防空(GBAD)ソリューションとさえ効果的に交戦できることを示している。同時に、AIの戦術は、これらの防衛システムが、AIによって強化されたスウォームに耐えられるように、どのようにアップグレードできるかも示している。
これらの知見に基づき、我々はAI戦術カーネル※4が将来のソフトウェア定義型防衛ソリューションの重要なビルディング・ブロックを構成すると主張する。この戦術カーネルは、現在の能力要求と現在進行中の戦場での要求および将来の部隊のビジョンを組み合わせるための多媒体伝達任務メカニズム(multi-avenue transmission mechanism)として使用することができる。
※4 AI戦術カーネルとは、ここでは、軍事用(戦術的用途)に使用するAIのアルゴリズムの中核となる部分を指していると思われる。
本論文は、戦場におけるAI戦術の役割を取り上げた白書3部作の2番目の論文である。これらの論文は、赤と青のAI戦術を開発することを目的とした能力・技術開発プロジェクトであるGhostPlay※5から生まれたものである。2022年に発表された最初の論文『Free Jazz on the Battlefield』では、核となる考え方を示し、基本的な手法の重要な側面(例えば、分散化された非階層的な指揮・統制の使用など)を説明し、攻撃的なスウォームに対する防空の役割に焦点を当てた最初の調査結果を発表した。今年後半には、海戦におけるAI戦術を扱った3本目の論文を発表する予定である。
※5 GhostPlayは、複雑な軍事的交戦のためのAIベースの戦術をマシン・スピードで訓練、視覚化、分析するための戦場のバーチャル・ツインである。「”Ghost”は現実の高性能バーチャル・ツインである。”Play “は、このようなバーチャル・ツインにおいて、AIが制御する赤と青のフォース・プラットフォーム・アバターの挙動を実証する。(参考:https://www.ghostplay.ai/)
2. 戦場におけるボクシングの伝説
蝶のように舞い、蜂のように刺す。
彼の目には見えないものを、彼の手は打つことができない。
モハメド・アリ(Muhammed Ali)[1]
口を殴られるまでは誰もが計画を持っている
マイク・タイソン(Mike Tyson)[2]
2014年、ロバート・O・ワーク(Robert O. Work)米国防副長官(当時)とショーン・ブリムリー(Shawn Brimley)は、無人システムのスウォームが将来の用兵(future warfighting)を大きく変える可能性があると最初に主張した。彼らは、敵対者を圧倒し、優位に立つための新たな選択肢を提供すると主張した[3]。それ以来、「質としての量(quantity as quality)」は、NATO/EU諸国やそれ以外の国々でも、戦力開発のライトモチーフ(leitmotiv)※6として解釈されるようになってきた。最近では、キャスリーン・ヒックス(Kathleen Hicks)米国防副長官が、将来の用兵(future warfighting)のために量(mass)を活用するレプリケーター構想(Replicator initiative)を発表した[4]。この方針に沿って、米国は台湾の防衛態勢をバックアップするため、291個のアルティウス(Altius)600M-V浮遊弾と720個のスイッチブレード(Switchblade)300の売却を承認した[5]。ロシアがウクライナでシャヘド(Shahed)136無人機やその他の無人システムを使用していることや[6]、2024年4月にイランがイスラエルに対して300基の無人機とミサイルを配備すること[7]は、「質としての量(quantity as quality)」というナラティブを裏付けているようである。
※6 ライトモチーフ(leitmotiv)とは、オペラ・標題音楽などで、特定の人物・理念・状況などを表現するために繰り返し現れる楽節・動機。ワグナーの楽劇によって確立された。指導動機。示導動機。(https://dictionary.goo.ne.jp/word/ライトモチーフ)
無人の量(mass)は、例えばドメインや作戦戦域を越えて戦力要素を分散させることで、有能な対等な競争者と闘うために重要な役割を果たすことができる。しかし──これが戦力開発者にとっての重要な疑問なのだが──それは、想定されているほど決定的なものなのだろうか?
ムハメド・アリ(Muhammed Ali)とマイク・タイソン(Mike Tyson)、上で引用した2人の偉大なボクシング・チャンピオンは、この問いに答えるためにことわざの「助けの手(helping hand)」を貸してくれる。まず、センサーとシューターを組み合わせて標的を特定し、命中させるいわゆる「キル・チェーン(kill chain)」[8]は、軍事的思考において基礎的な役割を果たすようになった。しかしアリ(Ali)は、エフェクターの性能は利用可能なセンサー、そして両者をつなぐデータと情報処理の遅延に大きく左右されると指摘し、センサーからシューターへのジレンマを完璧に捉えている。したがって、手(エフェクター)は目(センサー)が見えるものしか打つことができない。量(mass)だけでは、このジレンマから抜け出す簡単な選択肢はない。むしろ量(mass)は、このセンサーからシューターまでのサイクルのすべての要素をスムーズに統合し、調整するという課題を増大させる。
第二に、量(mass)は軍事力を提供する新たな選択肢を提供するが、量(mass)は兵力・兵站計画者に余分な負担を強いる。戦力を単一部隊に分解し、これらの部隊を戦役速度(campaign speed)や任務要件に応じて再構成することを予見するモザイク戦(Mosaic warfare)[9]は、量(mass)が決定的な要因となるための基礎を提供するが、従来の計画は「タイソン・テスト(Tyson test)」に適していない。計画策定は、計画策定サイクルを開始する時点で利用可能な赤部隊と青部隊に関する知識の範囲内でしか行えない。タイソン(Tyson)が正しく観察したように、敵の自発的なパンチは予見できない。繰り返すが、これらのアセットを調整するパラダイムを変えることなく、(無人)アセットの数を増やすだけでは、敵対者との武力交戦をより面倒なものにする可能性が高い。したがって、予測不可能な事態にどう対応するかをはるかに意識したアプローチへの転換が急務であると主張する。
その結果、警戒態勢が敷かれている。ドイツ陸軍コンセプト・能力開発センター(ACCDC)と共に、我々は18ヶ月に及ぶ先進コンセプト研究「ワイルド・ホーネッツ(Wild Hornets)」に取り組んできた。我々は、地上配備型防空(GBAD)に対するスイッチブレード(Switchblade)600のような航空発射効果(ALE)のヘリコプター使用に関する将来のコンセプトのためのAI戦術を開発するために、センターの要件を満たす戦場の高忠実度バーチャル・ツインであるカスタマイズされた防衛メタバースを構築した。本論文に要約された知見に基づき、我々は次のように結論づける。無人の量(mass)はそれだけでは決定的なものではない。むしろ、量(mass)が勝利するためには、編成ではなく編成を重視した[10]新たなAI戦術が必要である。特に、攻撃してくる航空発射効果(ALE)のスウォームを撃退するための強力な対抗手段を備えたAI強化地上配備型防空(GBAD)に遭遇する場合はそうである。
軍隊のための新しい解決策としての無人の量(mass)に関する我々の注意書きは重要である。それは、コンセプト開発のために防衛メタバースを使用することで、軍事プランナーが一般的なアイデアに惑わされるのを防ぐことができることを強調している。加えて、我々の研究はまた、ソフトウェア定義防衛が、新しいコンセプト、将来の防衛製品の仕様、およびより主張が強く、より不安定で、したがってよりリスクを抱えやすい戦略的環境に軍隊を備えるための斬新な実戦および軍事訓練のアイデアを考え出すために提供する機会を示している。
3. 防衛メタバース:戦力開発のための新しいデジタル環境
防衛メタバースは、戦場の忠実度の高いバーチャル・ツインである。ニール・スティーブンソン(Neal Stephenson)は1992年、人間がソフトウェア・エージェントと相互作用する3次元仮想空間を表現するために、メタバースという言葉を初めて作った[11]。それ以来、このコンセプトは、物理的なオブジェクトやプロセスが相互作用するためのデジタル・レプリカを作成するというアイデアを表すようになった。民間産業は、研究開発から保守・メンテナンスに至るまで、製品ライフ・サイクルの全段階を仮想環境に取り込むためのデジタル化の包括的な利用を示すインダストリー4.0として、このコンセプトを受け入れている。防衛企業もこれに追いつこうとしている。例えば、異なるタイプの装甲に対する爆発物の影響を評価するためなど、特定のシミュレーションに使用される個々のデジタル・モデルから始まったものが、デジタル・モデル・ベース・エンジニアリングの助けを借りて、より一般的な慣行となっている[12]。
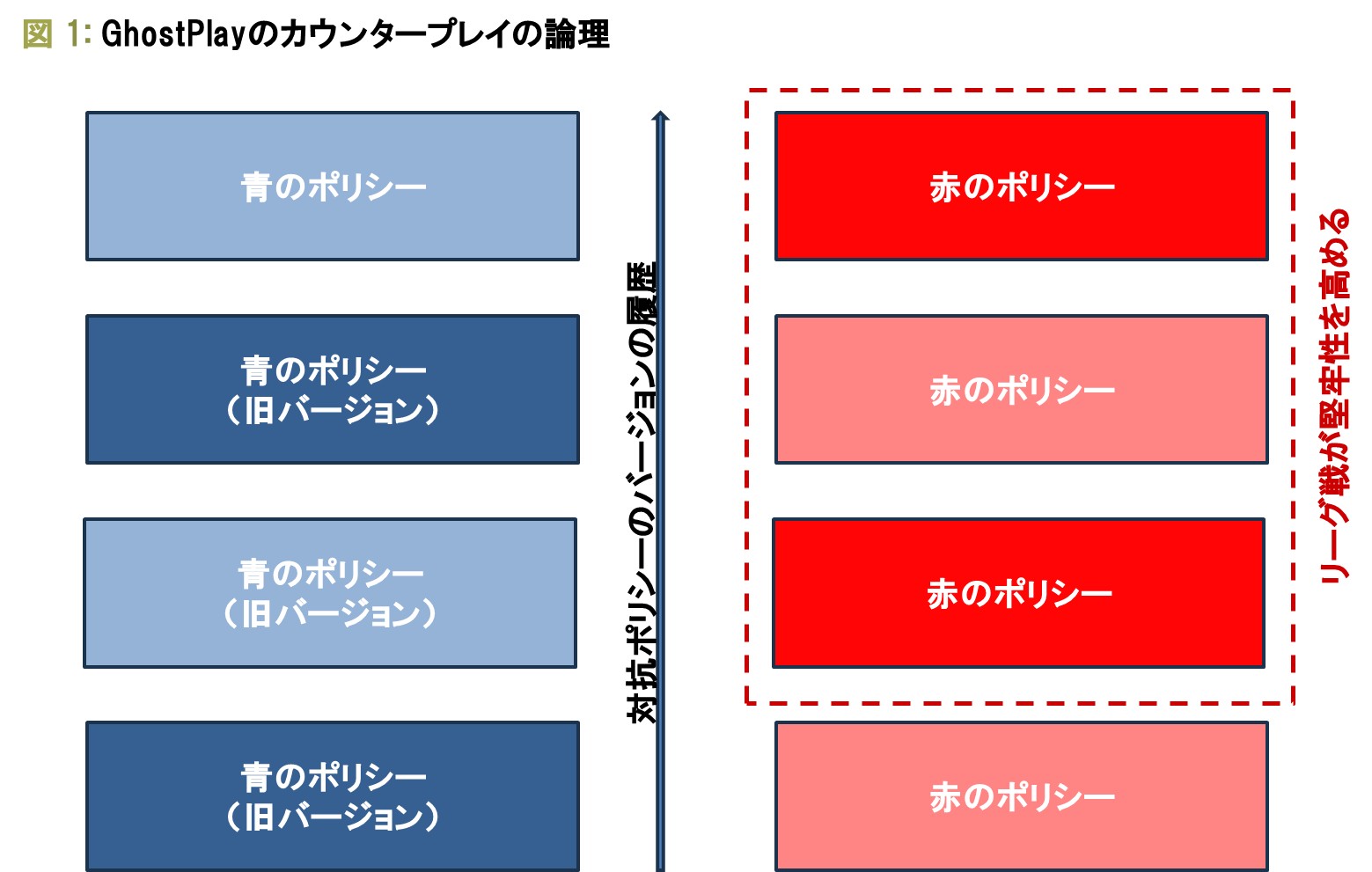
GhostPlayで確立された防衛メタバースは、このような取り組みに沿ったものだが、ユニークな特徴と機能を提供する。我々の防衛メタバースは、例えばセンサーやエフェクターのモデル、天候、植生、地形、そして都市や農村のインフラなどを図示し、戦場の非常に現実的なレプリカを作成する。最も重要なのは、人工知能(AI)に戦術を開発させるために、カウンタープレイ・ロジック(図1)を使用することである。このように、AIに「フリー・ジャズ(free jazz)」を演奏させ、人間が設定した特定のパラメータの中で、どのような戦術が任務の成功に最も適しているかを探らせるのである。
 |
カウンタープレイ(counterplay)は、AIが「賢い敵対者(smart adversary))との相互作用の中で成功する戦術を開発することを可能にする。技術的に言えば、システムは最適な決定順序を決定するために、一連のプレーの動きを前もって計画している。一方のアクターが成功するポリシーを開発するとすぐに、対戦相手は対応策を学習する。カウンタープレイ(counterplay)の到達目標は、より複雑でより挑戦的な敵対者に対して訓練することで、行動ルールと決定ルールの性能を徐々に向上させることである。最終的に、このアプローチは窃取不可能なポリシーを定義するのに役立つ。
防衛メタバース内のカウンタープレイは、相互作用がスクリプトに取って代わるため、ほとんどスクリプトなしでシナリオを展開する新たな機会を生み出す。これには2つの重要な利点がある。
- 第一に、従来のシミュレーションが扱うことのできるシナリオよりも、はるかに多くのシナリオをカバーすることが可能である。これには、技術仕様を評価し、ワーストケース、ベストケース、および期待ケースの解析のパラメータを設定するために、コンセプト開発に最も有益な、予期せぬ意外な振舞いを示すシナリオも含まれる。防衛メタバースは、AIが何の制限もなく「フリー・ジャズ(free jazz)」モードで作戦することを提供する一方で、特定の既知の交戦規則内でのみ交戦したり、既知の戦術的行動を模倣するために、赤の部隊に制限を設定することも可能である。
- 第二に、カウンタープレイは、分析的バイアス、すなわち敵対的行動に関する特定の信念や仮定に基づいたシミュレーションのデザイン選択のリスクを大幅に低減する。分析者のバイアスは、それぞれの仮説が確立された知識であるとみなされるため、通常は疑問視されないコンセプト的な罠を伴う可能性があるため、問題となる。しかし、すでに知られていることを再確認することは、既存の常識に挑戦するような型破りな行動の出現を防ぐことになる。それとは対照的に、カウンタープレイを駆使して開発された赤部隊の戦術は、予想外の結果を生み出す。これは、防御者が使用するシステムのワークフローにおけるデザイン上の欠陥を特定するために最も重要なことかもしれない。
GhostPlayのカウンタープレイへのアプローチは、モザイク戦(Mosaic Warfare)の主要な要素である分散型統制戦略(decentralized control strategies)の開発も支えている[13]。後述するが、分散制御戦略とは、例えば無人システムのスウォームのメンバーが、連動して任務を達成するための共同戦術を開発することを学ぶことを意味する。その結果、防衛メタバースは、シミュレートされたシナリオの展開に応じて行動を変化させることができる多数のオブジェクトを含む高強度の戦闘シミュレーションを実行することができる。このように、青または赤の部隊の振舞いが、ゲームをどちらか一方に変化させるような状況の限界を押し広げる。
防衛メタバースがこうしたシミュレーション・オプションを提供するためには、デジタル環境を非常に現実的にモデル化する必要があることは言うまでもない。次の節で「ワイルド・ホーネッツ(Wild Hornets)」のコンセプト・スタディに関連する具体的なパラメータについて述べるが、ここでは作戦環境のモデリングに必要な取り組みについて述べたい。
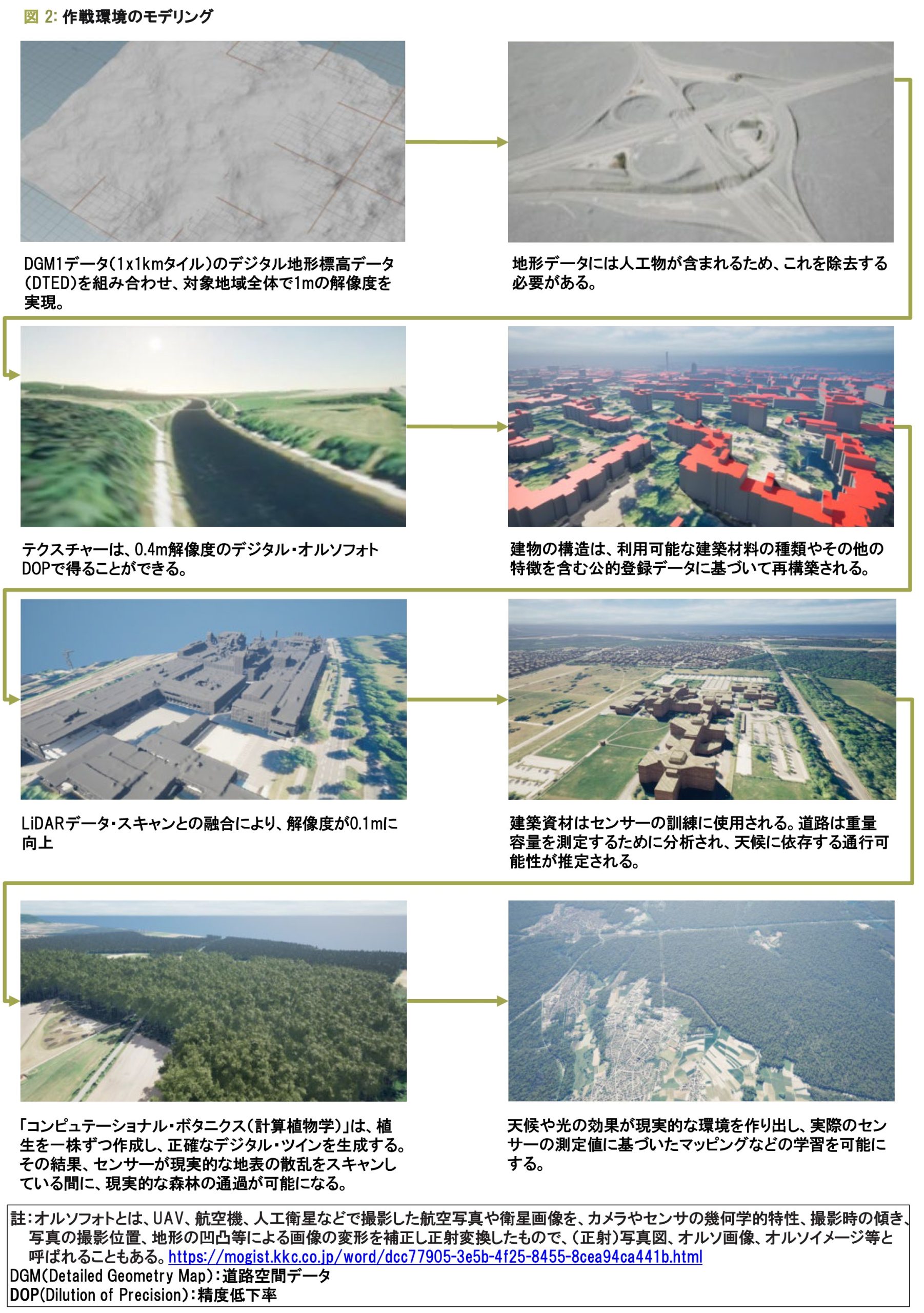
この論文で概説したように、戦術的な自己主張は、シミュレーションが地形、建物、植生、天候、眺望などの環境データを処理することを必要とする。必要な詳細レベルを比較的短時間で開発するために、我々は自動化されたパイプラインを作成した。これらのパイプラインは、さまざまなデータを使用して、対象地域のデジタル・モデルを生成する(図2)。
パイプラインの構築は、デジタル地形標高データ(DTED)を使用することから始まる。「ワイルド・ホーネッツ(Wild Hornets)」のために分析された任務は、バイエルン州フランケン(ドイツ)でプレーするように設定された。建物に関する情報がデジタル地形標高データ(DTED)を補強し、その両方がLIDAR(Light Detection and Ranging:光検出と測距)データと融合された。これにより、最大10cmの粒度で地形と建物のデータ・プロファイルを作成することができた。任務地域(mission area)の植生の種類と被覆を現実的に再現するため、合成的に植生を生成した。シミュレートする気象条件によっては、通行可能性分析を実施することができる。
「ワイルド・ホーネッツ(Wild Hornets)」のデータを準備する際、バイエルン州当局がオープンソースのデジタル地形データを提供していることが役に立った。しかし、これは他の多くの地域には当てはまらない。そのため我々は、リモート・センシングに基づく3次元のインフラストラクチャ・データを再構築しモデル化するために、写真測量手順とニューラル放射輝度場(NeRF)に基づく特定の開発パイプラインを開発した。
 |
4. ワイルド・ホーネッツ(Wild Hornets):先進的コンセプト開発のための防衛メタバースの微調整
「ワイルド・ホーネッツ(Wild Hornets)」は、ドイツ陸軍コンセプト・能力開発センターと協力して実施された先進コンセプト研究である。この研究の目的は、いわゆる空中発射効果(ALE:Air-Launched Effects)と呼ばれる、従来の無人航空機システム(UAS)とミサイルの間の空域を占める無人アセットの将来の能力要件を評価することである。その際、既製のソリューションにとどまらず、高性能な地上配備型防空システム(GBAD)に対する作戦において、これらのシステムが提供する戦術的付加価値を評価する。
分析の到達目標の一つは、低空飛行や最低飛行経路のために地形の特徴を利用する能力など、特定の技術的特徴が戦術的価値をもたらすかどうか、またその程度を精査することであった。第二の到達目標は、航空発射効果(ALE)を使用するための新しい戦術・技法・手順(戦術・技法・手順(TTP))を開発することであった。陸軍センターの専門家が定義した既存の戦術・技法・手順(TTP)を評価する一方で、我々はAIを使って攻撃側のスウォームと防御側の地上配備型防空(GBAD)システムのための新しい戦術・技法・手順(TTP)を開発した。
「ワイルド・ホーネッツ(Wild Hornets)」に設定された具体的な技術的パラメータを取り上げる前に、まず沿空域(air littoral)での闘いの課題について説明する。このドメインは、同盟部隊の「機動の自由(freedom of maneuver)」を確保し、敵が迅速かつ安全に戦場の位置を変える柔軟性を否定するために極めて重要である。殺傷能力、探知能力、生存能力、そしてテンポのすべてが、沿空域(air littoral)で重要な役割を果たす。そしてAIは、これらの重要なパラメータ間の相互作用を形成する上で重要な役割を果たす。
4.1. 沿空域(Air Littoral)での闘い:舞台設定
沿空域(air littoral)はますます重要な用兵ドメインとなっているが、この狭い空中回廊で勝利を収めるとはどういうことなのか、十分に理解されていない。沿空域(air littoral)は、青い空と陸地に隣接する空域との間の「空の橋(air bridge)」を構成する。そのため、この狭い空域を守る陸上防空能力が萎縮しているのに対し、ほとんどの空軍は主に青空を重視しているため、沿空域(air littoral)はちょっとした無人地帯となっている[14]。過去20年間、軍事作戦が一般的だった時代には、このような問題はなかったが、無人航空機(UAV)や一人称視点(FPV)ドローン、ミサイル、砲兵などが同じ空域を共有することが多くなり、大きな問題になりつつある。
沿空域(air littoral)の混雑と争いが激化するなか、米国防高等研究計画局(DARPA)は2020年、迅速な戦術実行のための空域総合認識(Air Space Total Awareness for Rapid Tactical Execution :ASTARTE)プログラムを開始した。その到達目標は、「ダイナミックな」未来の空域について、リアルタイムで共通作戦図(common operational picture)を提供することである[15]。沿空域(air littoral)の矛盾を解消する(deconflicting)のに役立つ共通作戦図(common operational picture)は重要だが、十分ではない。
今日の課題により、「航空管制を再コンセプト化すること」が極めて重要になっている。なぜなら、「沿空域(air littoral)の航空管制は青空の管制から急速に分離しつつあるからである」[16]。これは明らかなジレンマである。沿空域(air littoral)の航空管制を失うことは、敵に侵入困難な空域を作らせることによって、下からの航空戦力を麻痺させると同時に、陸上部隊にとっては上空からの危険性が高まり、作戦行動の自由を侵害し、生存能力を大幅に低下させる[17]。
沿空域(air littoral)における危険性を取り上げる際、ほとんどの分析は無人航空機システム(UAS)のスウォームの出現に焦点を当てている。スウォームが成功するかどうか、激しい議論がある。英国王立サービス研究所(RUSI)のジャスティン・ブロンク(Justin Bronk)とジャック・ワトリング(Jack Watling)は、量(mass)の精密打撃複合体のための無人プラットフォームの開発には、機体、推進力とパワー、ナビゲーション、データリンク、センサー、エフェクター、安全要件などの規制面について、厳しいトレードオフが必要だと正しく主張している。それは、AIの活用によって開発される将来の戦術が、どの程度まで自律的なスウォームの戦場行動を形成するのか、また、こうしたAIの戦術が、プラットフォーム、センサー、エフェクターのデザインや特性をどのように形成するのか、という点である[18]。
このようにAIの戦術に焦点を当てることで、多くのアナリストはAIが戦場での戦術を開発するために学習できることを知らないようであり、文献のギャップが明らかになった[19]。だからこそ、本稿の知見は軍事コンセプトの開発に役立つと同時に、より広範な文献に貢献することになる。AIが協調した調整のような戦術を開発するためにどのように自己学習することができるかを議論することによって、我々は、将来の沿空域(air littoral)での戦闘がどのように見えるかを示している。同時に、攻撃型スウォームと地上型防空型スウォームのどちらが優勢になるかは、一筋縄ではいかないため、攻撃対防御の議論はもっと微妙なニュアンスを持つ必要があることも示している。
4.2. ワイルド・ホーネッツのパラメータ
「ワイルド・ホーネッツ(Wild Hornets)」の研究結果を正しく解釈するためには、ヴィネット、さまざまなデジタル・モデルの仕様、シミュレーション・データを作成するためのアプローチが重要である。詳細を説明する前に、「ワイルド・ホーネッツ(Wild Hornets)」の研究の到達目標を達成するためには、強力な非協力的赤部隊を備えた非常に詳細なシミュレーション環境を構築することが重要であることを強調しておく。もしヘリコプターが航空発射効果(ALE)を発射して敵の地上配備型防空(GBAD)とうまく交戦することが期待されるのであれば、敵対者が攻撃スウォームに挑戦することが最も重要である。シミュレーションの構成要素が細部まで細心の注意を払ってモデル化されているのはそのためであり、さらに重要なのは、相手を奇襲するための予測不可能性である。
ヴィネット
ヴィネットと中核となる研究課題はドイツ陸軍コンセプト・能力開発センター(ACCDC)によって定義されている。4つのヴィネットは、全体的な状況、具体的な任務の到達目標、およびさまざまなエフェクターの組み合わせを記述している。
まず始めに、4機の攻撃ヘリコプターと3機の輸送ヘリコプターを使用する陸軍航空部隊が、戦闘地域の前端まで約20kmを100ft以下で飛行する。その任務は、敵対する高価値ターゲットを特定し、無力化することである。この目的のために、ヘリコプターは光学センサーを装備した偵察用航空発射効果(ALE)を数機発進させる。相手は高価値ターゲットを守るため、短距離防空(SHORAD)システムを複数配備している。発見されると、航空発射効果(ALE)は異なる方向から短距離防空(SHORAD)コンステレーションを攻撃し、高価値ターゲットを囲む防護層を劣化させる。シナリオでは、これらのコア・パラメータを変更することで、任務がますます複雑化し、競争が激しくなり、その結果リスクも高くなる。
デジタル短距離防空(SHORAD)と弾薬モデル
短距離防空(SHORAD)システムは、ドイツのゲパルト(Gepard)砲兵対空(AAA)システムを参考にモデル化された[20]。これは、ロシアの2K22ツングースカ(Tunguska)や96K6パンツィール(Pantsir)、中国のType08システムのような、砲ベースの短距離防空(SHORAD)システムの原型と解釈できる。現在でも、ゲパルト(Gepard)の全体的な遅延と、砲塔と砲に使用されているパワートレイン※7は、他の砲ベースの短距離防空(SHORAD)システムでは満たすことが難しい基準を設定している[21]。
※7 パワートレインとは、駆動力の伝達装置を意味する。
また、ゲパルト(Gepard)の物理的パラメータ(砲塔の移動時間、射撃の頻度など)、内部処理サイクル、センサー・パッケージがよく知られているため、このシステムを選択した。我々は、ドイツ陸軍で使用されなかったKWS FlakPz2を使用した。このシステムは、2つのペリスコープと光学トラッカー、熱画像、レーザー距離計、追跡レーダーと火力統制システムで補完されたMDPR 12サーチレーダーを備えている[22]。
いくつかのシナリオは、外部の認識された航空画像(RAP: Recognized Air Picture)を使用したゲパルト(Gepard)で計算されている。また、ゲパルト間(Gepard-to-Gepard)の直接通信が可能であると仮定している。デジタル・ゲパルト(digital Gepard)は、個別の索敵・追尾レーダーを使用するのではなく、GhostPlayチームのメンバーであるヘンソルト(Hensoldt)が提供する複合Eスキャン・レーダー・モデルを使用している。この最新鋭の多機能レーダーは、索敵、確認、追跡の各モードで作動する。我々のシミュレーションでは、オリジナルのゲパルト・レーダー・システム(Gepard radar system)の性能にほぼ一致するようにレーダー・パラメータを再調整した。
デジタル・ゲパルト(digital Gepard)は4種類の弾薬を使用する。高爆発性焼夷弾(HEI)、半装甲貫通高爆発性焼夷弾(SAPHEI)、フランジブル装弾筒付翼安定徹甲弾(FAPDS)、先進的命中効率・破壊(AHEAD)弾である。これらの弾薬の初速は1,175~1,400m/s、有効射程は3,500~4,500mである。先進的命中効率・破壊(AHEAD)弾を使用するため、ゲパルト(Gepard)のデジタル・モデルにはレーザー距離計が装備されており、砲身から弾丸が離脱する際の解体時間をプログラムしている。弾道曲線のシミュレーションには、2次抗力を持つモデルを使用した[23]。
デジタル空中発射効果(ALE)モデル
航空発射効果(ALE)システムは、エアロ・ビロンメント(AeroVironment)社のスイッチブレード(Switchblade)600徘徊型弾薬(loitering munition)をベースにモデル化された[24]。我々は、飛行力学を実装するために、物理的に十分な2つのシミュレーション・モデルを構築した。1つは飛行方位制御装置を使用した飛行を表すモデルで、もう1つは飛行方位制御装置を使用せずにアクチュエータ制御を直接使用した非安定飛行を表すモデルである。熟練パイロットはどちらのモデルも現実的であると評価したが、我々のモデルは固定翼徘徊型弾薬(LM)の一般的なデジタル表現に過ぎないことを認める。したがって、このモデルが実際のスイッチブレード(Switchblade)600の飛行力学をどれだけ正確に表現しているかは保証できない[25]。
スイッチブレード(Switchblade)600に加え、我々はSPIKE NLOS[26]をベースとした非見通し線(NLOS)ミサイルをモデル化し、適切なデジタル・レプリカ(digital replica)を作成した。航空発射効果(ALE)のスウォームを構築するために、他のタイプの徘徊型弾薬(LM)を使用することも可能であったが、我々は検討中の研究課題に対してスイッチブレード(Switchblade)600を代表的なものと考えている。ジェット推進(Coyote LMなど[27])とプロペラなど、技術的な違いが重要な場合は、特定のパラメータを調整した。
シミュレーション・モデルには、終盤戦(end game)における航空発射効果非見通し線(ALENLOS)ミサイル通信も含まれている。非同期の高遅延衛星通信に匹敵する特性と、他のスウォーム・メンバーを中継ノードとするメッシュ通信による漸進的な情報伝播とを反映した、さまざまな通信モデルの実験を行った。
デジタル・センサー・モデル
防衛メタバースにおけるセンサー・シミュレーションは、信号ベース、確率ベース、オートエンコーダー・モデルに基づいている。信号ベースのモデルは、センサー処理モデルまたはその一部の現実的な複製を提供する。これらのモデルはまた、検証可能なもっともらしい高解像度センサー画像を提供する。我々のシミュレーションでは、GhostPlayのパートナーであるヘンソルト(Hensoldt)社が提供する信号ベースのモデルを使用した。しかし、信号ベースのモデルは、物理的な作用モードをシミュレートするために大きな計算能力を必要とする。そのため、リアルタイムよりも高速に実行する必要があるシナリオの計算には課題が生じる。そのため我々は、特定のシナリオを分析するためにのみ信号ベース・モデルを使用することに重点を置いている。
サンプリングとパラメトライゼーションにより、信号ベースのモデルの性能パラメータと一致する確率的センサー・モデルを計算することが可能になる。確率論的センサー・モデルは、計算能力を大幅に削減できるため、戦術シナリオ・シミュレーションに非常に適している。これらのモデルは信号ベースのモデルの主要な統計的特性を捉えているが、シングル・ケースの妥当性はない。確率論的センサー・モデルは、ポリシーを開発するための訓練実行にのみ使用され、その後、信号ベース・モデルで動作するように転送される。
GhostPlayの防衛メタバースの非常に高い解像度は、没入型センサー表現のための基礎を築く。まず、自動エンコーダを訓練するために、センサー・データを実際の環境で記録することができる。これにより、実際の状況に見合ったセンサー画像の凝縮された内部表現が生成される。また、防衛メタバースにおいて、録画に使用されたのと同じ場所を選択し、デジタル・センサーを全く同じ場所に配置することができる。その後、シミュレートされた環境が元のセンサー入力を置き換える。オートエンコーダのパラメータは、入力信号の受信時に記録されたセンサー画像を複製するように適応される。この方法はまた、デジタル環境におけるオリジナルセンサーのアーチファクトをキャプチャし、信号ベースのセンサー・モデルの欠点を補う。これにより、現実的で非常に詳細なデジタル・モデルが作成され、現実的なグランド・クラッター※8の効果も含まれる[28]。
※8 グランド・クラッターとは、気象観測や航空管制のレーダーで、地上の構造物や樹木などから反射したエコーのこと
シミュレーション・データ
最後にシミュレーション・データについて一言。我々は、ジェーン(Janes)から提供された情報と我々自身の研究に基づいたオープン・データのみを使用した。可能な限り、知覚モデルに関連するデータを生成するために特定の解析ソフトウェアを使用した。例えば、レーダー・モデルで使用した航空発射効果(ALE)レーダー断面積(RCS)は、MatlabのPOfacetsパッケージを使って計算した[29]。また、電気光学(EO)および赤外線(IR)画像をシミュレートおよび計算するために適切なソフトウェアを使用し、それぞれのスペクトル範囲で各物体に対応するオーバーレイが利用できるようにした。さらに、公開されている情報を評価し、ウクライナで墜落・回収されたシステムのビデオを分析することで、航空発射効果(ALE)システムの製造に使用された材料の仮定を作成した。
細心の注意を払ったにもかかわらず、オリジナルのシステム・データは使用しなかった。しかし、シミュレーションの結果を見ると、オリジナル・データを使用しなかったことによる限界は無視できるものである。全体として、我々のシミュレーション結果は条件が整っており、パラメータを少し変えるだけで、シミュレーション結果が少し変わる。加えて–より重要なことだが–、AIシステムは、変更されたパラメータでどのように動作するかを学習し、パラメータの変更に応じて動作を再調整する。
5. 新たなAI戦術が違いを生む
5.1. ベースラインの設定
「ワイルド・ホーネッツ(Wild Hornets)」で開発された具体的なAI戦術を見る前に、上述の短距離防空(SHORAD)コンステレーションに対して最新鋭の航空発射効果(ALE)を使用した場合のシミュレーションに基づく知見について述べたい[30]。
初期のテストは、現在ほとんどの航空発射効果(ALE)および短距離防空(SHORAD)ソリューション・プロバイダーがシステムの性能を実証するために使用しているシナリオに似ていた。これらのテストでは、ヘリコプターが地上100フィート上空まで航空発射効果(ALE)を発射した。ヘリコプターが航空発射効果(ALE)を誘導するシナリオもあれば、航空発射効果(ALE)のスウォームが誘導するシナリオもあった。ターゲットを攻撃する際、航空発射効果(ALE)は降下軌道をたどった。我々は、異なるサイズ(最大50機)の航空発射効果(ALE)スウォームを使って、短距離防空(SHORAD)システムを攻撃した。短距離防空(SHORAD)システムは無作為に選ばれた位置から、異なる日照条件下で運用された[31]。これは、基本構成における成功率を特定するためのベースラインを確立するのに役立った[32]。
異なる短距離防空(SHORAD)コンステレーションを使用した10,000のサンプル・シナリオ[33]に基づき、我々の結果は以下のことを示唆している。
- シミュレーションで示された短距離防空(SHORAD)コンステレーションに対して、従来の軌道を使用した最先端の技術(state-of-the-art)の航空発射効果(ALE)が成功するのは、10ケース中1ケースのみである。
- アクティブ・センサーを使用する短距離防空(SHORAD)システムは、これらのセンサーが侵入してくる航空発射効果(ALE)を検知し、交戦するまでのリードタイムを改善するため、さらに強力になる。航空発射効果(ALE)スウォームが地表の乱雑さを避けて行動する場合、軌道は自動的に初期化される。電気光学(EO)センサーは、時折発生するトラックロスを補う。
- 手動で操作し(人間がループ内にいる)、パッシブ・センサー(およびレーザー)を使用する短距離防空(SHORAD)システムの性能は、異なる方向から接近してくる3~4機の航空発射効果(ALE)のスウォームに直面すると著しく低下する。これは主に、小型無人航空機(無人航空機システム(UAS))のような小さな飛行物体を検出、分類、識別するためのズーム・レイテンシーによるものである。
- 短距離防空(SHORAD)システムがAIで強化された場合、状況は劇的に防御側に有利に変化する。この場合、従来の軌道を使い、時速120~180km程度で飛行する航空発射効果(ALE)スウォームが短距離防空(SHORAD)コンステレーションを圧倒することはほとんど不可能である。全シナリオの約60%において、最大40機の航空発射効果(ALE)スウォームが全滅を喫した。
全体として、短距離防空(SHORAD)システムの優れた性能は、能動的かつ協調的な電子光学(EO)センサー制御、能動的なレーダー追跡、そしてゲパルト(Gepard)の超短制御サイクルによるものである。つまり、AI制御により、システムの総遅延をシステムの機械的な遅延までほぼ短縮することができる。この場合、航空発射効果(ALE)スウォームのテンポの悪さが主な欠点となる。
5.2. 終盤戦のAI戦術
上記の結果は、さらなる分析の出発点となった。ドイツ陸軍コンセプト・能力開発センター(ACCDC)の要求に沿って、将来の航空発射効果(ALE)スウォームが模擬短距離防空(SHORAD)コンステレーションを圧倒するために満たすべき主要な性能特性を特定することに関心があった。
まず、航空発射効果(ALE)スウォームが短距離防空(SHORAD)と交戦する終盤戦に焦点を当てると、我々のシミュレーション結果は、高度に機敏な飛行マニューバーを用いて目標に接近する地形追従型航空発射効果(ALE)スウォームが、現状維持の解決策よりも成功する確率が大幅に高いことを示している。しかし、最も重要なことは、個々のスウォームのメンバー間でタスクやサブタスクを調整、定義、委任する方法を自己学習するスウォームが、非常に強力なAIを増強した短距離防空(SHORAD)システムでさえ対抗するのが困難な、圧倒的な飛躍を生み出すことである。
地形追従
テストでは、図3に示すように、航空発射効果(ALE)スウォームを地形追従(terrain following)型に再設定した。これは、飛行高度を調整して、シミュレートした地形条件を最適に利用できることを意味する。訓練セッション中、制御戦略は自由に飛行高度を設定した。特定のウェイポイントも、航空発射効果(ALE)スウォームが従うべき最小飛行高度も定義していない。地形や建物、植生との衝突による航空発射効果(ALE)の墜落を防いだだけである。
 |
既存の地上真実は、地形追従を支える前方見通し調整機能の基礎となった。これは、ドイツ陸軍コンセプト・能力開発センター(ACCDC)が特定したかった必要最小飛行高度を測定するのに適切な選択であった。シミュレータには植生やインフラ(電線など)の詳細なモデルが含まれていたため、標準的なアルゴリズムを使用して、物体と環境間の動的な衝突検出を実装することができた。ベイズ・モデル※9を使用して、低高度飛行における障害物や乱気流のタイムリーな認識をシミュレートし、飛行高度に応じた現実的な損失率を求めました。例えば、物体と衝突する確率は、その物体が不注意で認識されなかった確率に依存する。これは距離、上空飛行のテンポ、センサーの視認性などに依存する。さらに、ドップラー・ノッチのような効果が実装され、航空発射効果(ALE)が軌道降下を引き起こすことができるようになった。その結果、低高度からのアプローチと早期発見のリスクとの最適なトレードオフが実現された。
※9 ベイズ・モデルとは、確率計算に基づいた統計モデルの構築手法で、ベイズ推定や階層ベイズ・モデルなどが含まれる。
我々が得た全体的な知見は、地形に追従する編成は、この飛行パターンを探知するのがより困難であるため、短距離防空(SHORAD)システムに挑戦するということである。このことは、原理的には、小口径弾が低空でゆっくりと飛行する航空発射効果(ALE)を交戦させることができるという事実を相殺することができる。しかし、航空発射効果(ALE)のスウォームが地形の特徴を利用できれば、飛行高度を下げることができるため、短距離防空(SHORAD)システムがスウォームを探知できる時間を短縮することができる。
図4が示すように、この種の作戦の結果は重要である。ここでは、ゲパルト(Gepard)ベースの短距離防空(SHORAD)システム(青)と遠隔兵器ステーション(RWS、黄色)に対する航空発射効果(ALE)スウォームの命中確率を比較している[34]。
- まず、航空発射効果(ALE)スウォームが検知されずにターゲットに180mまで接近できた場合、10件中7件は遠隔兵器ステーション(RWS)に対して成功することが示唆された。対照的に、ゲパルト(Gepard)の砲塔と兵器の高い回転率は、接近してくる目標までの距離をさらに110mまで縮める。
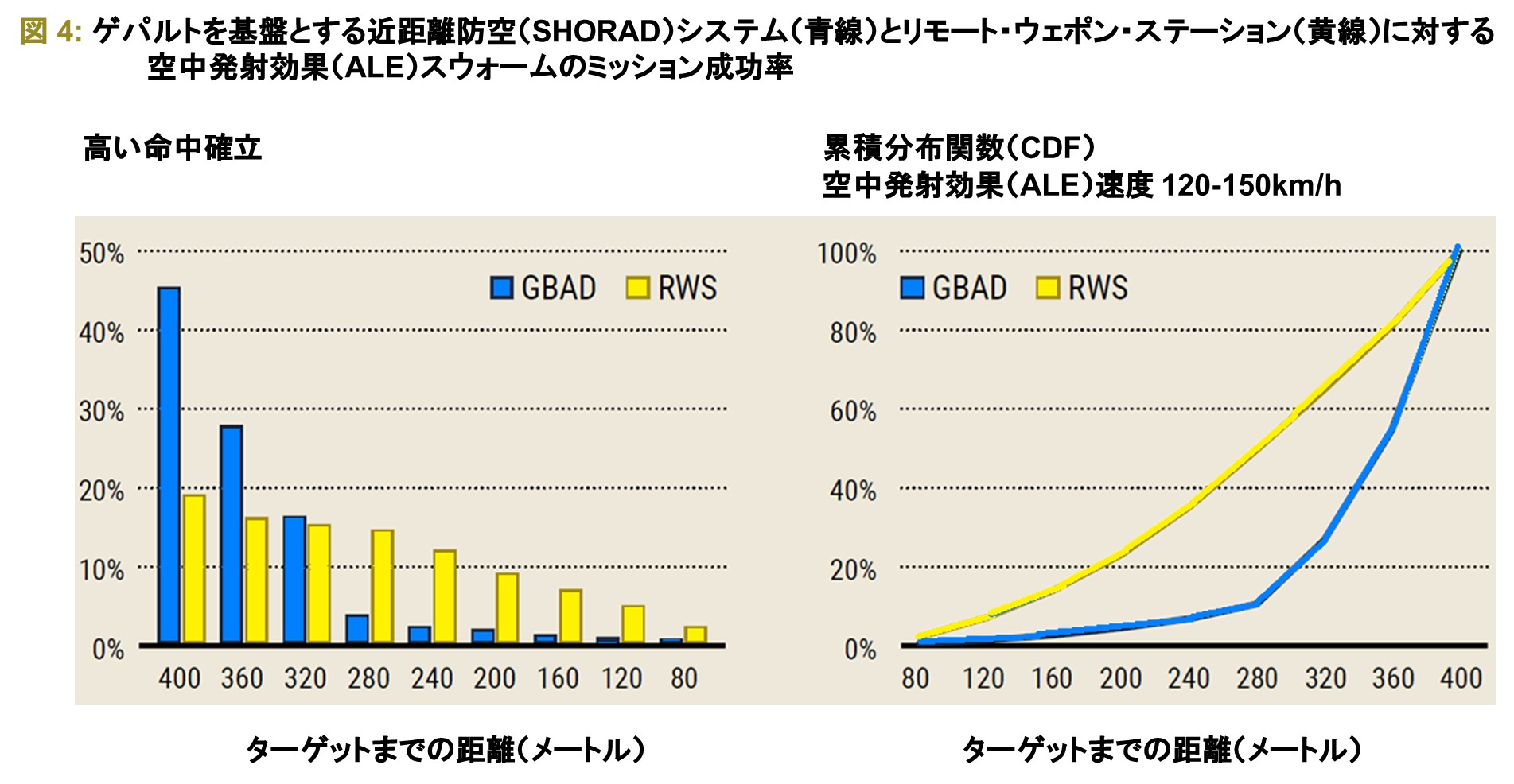 |
- 第二に、これらの結果は、対小型無人航空機システム(C-sUAS)ソリューションの性能を実証するために使用されている現在のシナリオが現実的ではないことを示唆している[35]。多くの場合、これらのシナリオは、静止した飛行物体(クアッドコプターなど)が、千メートルとは言わないまでも、数百メートルでうまく対抗できることを想定している。しかし、このようなシナリオはほとんど実現しない。というのも、スタンドオフ・コンステレーションは小型無人航空機システム(sUAS)が成功するにはあまりにも不利だからである。従って、対小型無人航空機システム(C-sUAS)の実証実験では、小型無人航空機システム(sUAS)が180m以下まで対抗システムに接近するシナリオを含める必要がある。
結論から言えば、地形、植生、建物の特性、天候の影響を利用する方法を学んだ航空発射効果(ALE)スウォームは、現在使用されている多くのタイプの砲ベースの短距離防空(SHORAD)システムをノック・アウトする可能性が高い。さらに、地上の散乱物に隠れるなどして、短距離防空(SHORAD)センサー装置を混乱させる方法を知っている航空発射効果(ALE)スウォームは、生存率をさらに向上させる。
短距離防空(SHORAD)の生存率を向上させるために何ができるのか?いくつかの選択肢がある。我々のシナリオでは、AI制御の完全自動化ゲパルト(Gepard)を使用した。この場合も、全体的な待ち時間が短いため、低空飛行や低空飛行の航空発射効果(ALE)スウォームに対しても、AIゲパルト(Gepard)の成功率が向上する。さらに、短距離防空(SHORAD)を当社独自のトラック・バイ・アテンション方式で強化することで、より堅牢になった。この方式は、入力データを直接使用してエフェクターを制御し、個々のターゲットを追跡する代わりに、ゲパルト(Gepard)のツイン・キャノンの反動を利用して弾幕射撃で交戦可能なターゲットのクラスターを特定する[36]。このように、トラック・バイ・アテンションは、第2章で論じた「モハメド・アリのジレンマ(Muhammed Ali dilemma)」を解決する可能性を提供する。
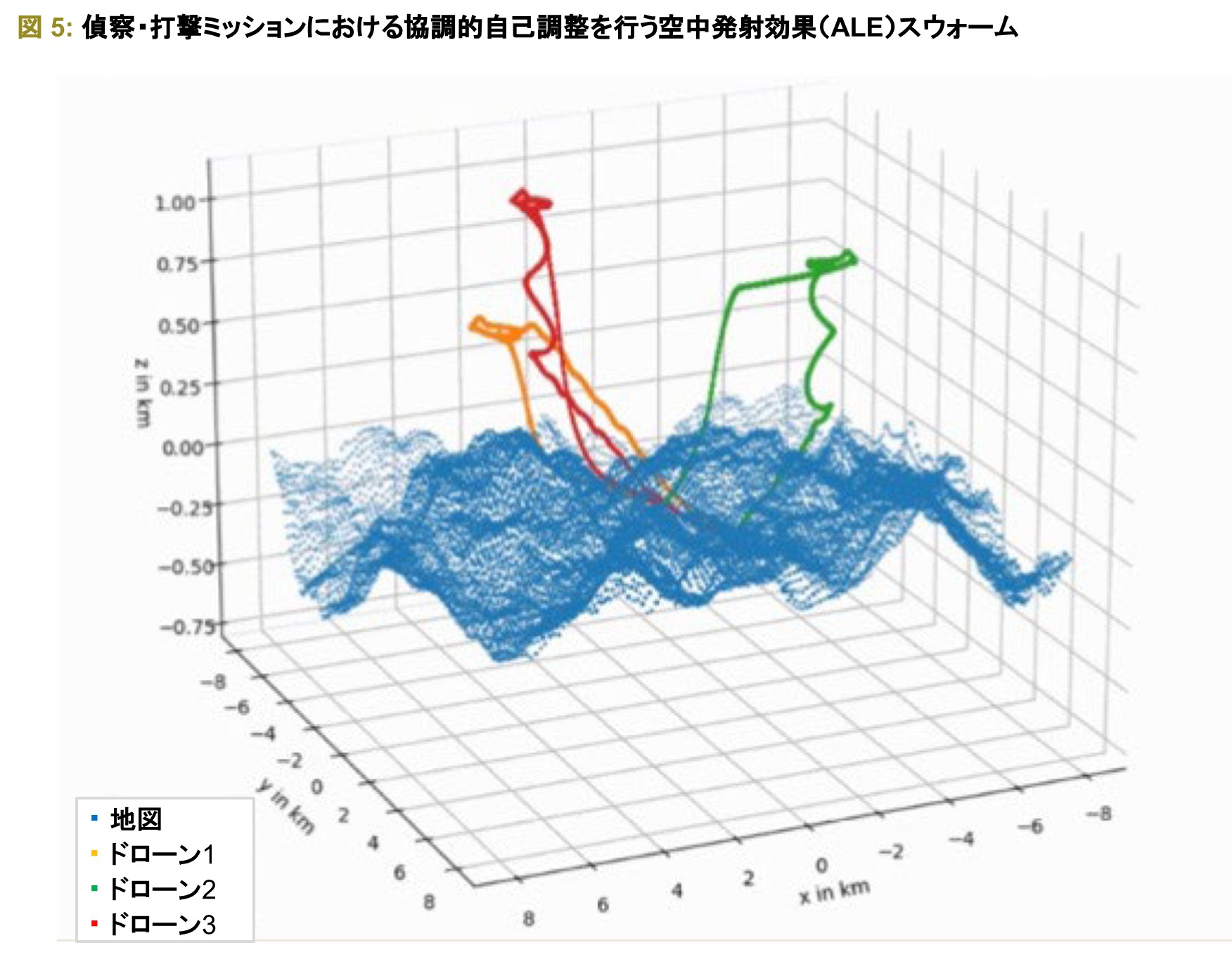
協調的な自己調整
異なる攻撃ベクトルを用いて多数の航空発射効果(ALE)で短距離防空(SHORAD)コンステレーションと交戦するには、協調が必要である。すべてのシナリオにおいて、航空発射効果(ALE)スウォームが短距離防空(SHORAD)システムを破壊するために最も成功した特徴は、協調的な自己調整であることが証明された[37]。これには、任務を達成するために個別的・集団的なタスクを実行する小規模なサブチームを形成する能力が含まれる。そのためには、航空発射効果(ALE)スウォームは、任務の到達目標とサブの到達目標を定義し、これらの到達目標の実行をチームメンバーに委任するアドホック戦略を策定しなければならない。アルゴリズム的に言えば、これは分散制御で可能であり、我々は協調した調整をモデル化するために「分散型部分観測マルコフ決定プロセス」(DecPOMDP)※10を使用した[38]。
※10 「部分観測マルコフ決定過程(POMDP)」は、マルコフ決定過程(MDP)の一般化であり、状態を直接観測できないような意思決定過程におけるモデル化の枠組みを与える。「部分観測マルコフ決定過程(POMDP)」 は実世界におけるあらゆる逐次的な意思決定過程をモデル化するのに十分であり、ロボットのナビゲーションや機械整備 (machine maintenance)、および不確実な状況下でのプランニングなどに応用されている。適用する対象が分散している場合のマルコフ決定過程(MDP)を「分散型部分観測マルコフ決定プロセス」(DecPOMDP)という。
図5に3機の無人航空機システム(UAS)のスウォームで描かれているような協調的な自己調整は、従来のスウォームとは何の関係もなく、現在ウクライナで観察されているパターンをはるかに超えていることを理解することが非常に重要である[39]。既存のコンセプトは、スウォームのメンバーが互いの行動を模倣して特定のパターンを飛行したり、事前に計画された飛行方向を実行するという考え方に基づいている。これとは対照的に、分散制御は、スウォームの各メンバーが自分自身の到達目標に従うことを意味する。スウォームのメンバーが協力するかどうか、またどの程度協力するかは、協力することで任務の到達目標を達成しやすくなる確率に依存する。このため、スウォームは、終盤戦(end game)中や、ヘリコプターの発進から目標に到達するまでの20kmの間に、関連する任務を達成するための最適な戦術を自己学習する必要がある。協調的な自己調整は、シミュレーションにおいて優れた結果をもたらす。
- 手動で操作するゲパルト(Gepard)にとって、協調的な時間依存協調を使用する6体までのスウォームに対抗することはほとんど不可能である。地形の特徴を利用できる誘導型航空発射効果(ALE)スウォームがゲパルト(Gepard)を上回るには、10ケース中8ケースで7機のメンバーが必要である。しかし、協調した調整を使えば、航空発射効果(ALE)スウォームのサイズは4機にまで縮小する。
 |
- スウォームが近代的で自動化された短距離防空(SHORAD)システムを攻撃した場合の性能はさらに素晴らしい。この種の防衛機に対して、低空を低速で飛行する誘導型航空発射効果(ALE)スウォームが成功したのは、10回の任務中4回だけだった。しかし、協調的な連携を用いる航空発射効果(ALE)スウォームのメンバーは、10件中8件で任務を成功させる。
これらの結果は重要である。協調的な自己調整により、スウォームのサイズが小さくなり、必要なスウォームのメンバーの数が減り、後方支援にかかる経費が削減されると同時に、スウォームの戦闘効果も高まるからである。これは、AI戦術カーネルが将来の無人エコシステム(第6章参照)にどのような優位性を提供できるかを示している。
繰り返しになるが、問題は、短距離防空(SHORAD)は対応できるかということである。しかしそのためには、短距離防空(SHORAD)のターゲット認識と火力統制のコンセプトを根本的に再認識し、再デザインする必要があった。ゲーム理論的なパラダイムを用いた新たなアプローチにより、複雑なスウォームの戦術を当初から識別し、将来の動きを予測し、攻撃側の戦術の変化に応じて対応することができる。シミュレーションの結果、トラック・バイ・アテンション法を用いてAIを増強したゲパルト(Gepard)に対して10ケース中4ケースで成功するためには、約12機のメンバーを持つ航空発射効果(ALE)スウォームが必要であることが示唆された。しかし、ゲパルト(Gepard)がさらにゲーム理論に基づいた新しいAI戦術を使用した場合、攻撃側の成功率は半減し、10件中2件にとどまる。
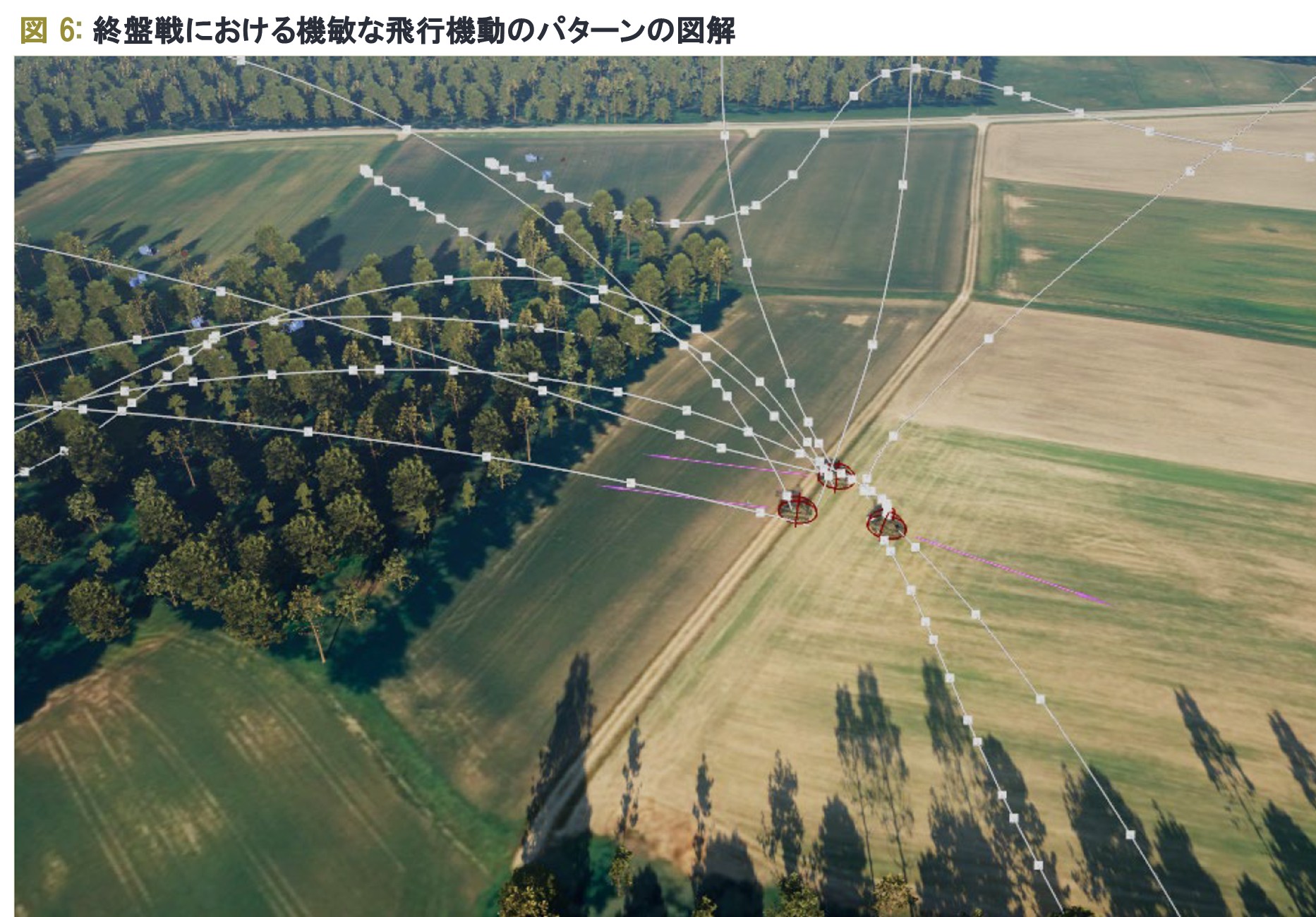
機敏な飛行機動
協調的な調整により、スウォームはコンバット・ジャンプやS字交差を飛行することができる(図6)。これらの飛行パターンの主な目的は、短距離防空(SHORAD)が航空発射効果(ALE)スウォームを追跡・追跡することをより困難にすることである。そうすることで、スウォームは地上の散乱物に隠れたり、飛行経路や方向を急に変えたり、短距離防空(SHORAD)の兵器システムが効かなくなる(高度80°を超える)攻撃位置に移動したり、短距離防空(SHORAD)の装甲の弱点を突いたりすることができる。
 |
シナリオについては、他のパターンと組み合わせた機敏な飛行操縦を訓練してきた。さらに、市販の一人称視点(FPV)ドローンの空力特性を最大限に引き伸ばすことを到達目標に、プロのドローン・レーサーと協力し、終盤戦(end game)用の飛行パターンを記録してきた。これらの軌道を利用して、低レベルコントローラーの選択性を向上させ、訓練の労力を削減し、従来の飛行パターンよりも脆いため探索が困難な極端な飛行パターンをAI戦術に統合した。これらのパターンを用いた初期の探索により、航空発射効果(ALE)スウォームの成功率をさらに向上させることが可能であることが示唆された。特に、完全に自動化され、AIで補強された短距離防空(SHORAD)システムに直面した場合である。
5.3. 偵察・打撃任務のためのAI戦術
ほとんどの場合、敵の位置は偽装やシグネチャ管理など、身を隠すための対策が施されているため、わからないか、発見しにくい。そのため、偵察任務では、航空発射効果(ALE)スウォームが終盤戦(end game)に突入する前に、該当する任務地域を調査し、敵の位置を特定して確認する必要がある。
理想的には、航空発射効果(ALE)スウォームは脅威の状況や任務の到達目標に見合った偵察戦術を開発するよう学習する。最も重要なことは、この戦術は予測不可能で、敵が認識・探知しにくい(不可能ではないにしても)ものであることである。攻撃側の航空発射効果(ALE)スウォームができるだけ長い間気づかれずにいてこそ、前述の「デッド・ゾーン(dead zone)」内の短距離防空(SHORAD)に接近することができる。
現在、ほとんどの偵察任務は、捜索救助(SAR)活動のために開発された、いわゆるスイープ・パターンを模倣している[40]。図7(左)が示すように、偵察機は目標の上空を規則的なパターンで飛行し、それによって芝刈り機のように移動し、短距離防空(SHORAD)地点(赤い星で図示)が特定されるまで飛行する。このパターンは、地上に非協力的な物体がない限り、効果的かつ効率的である。
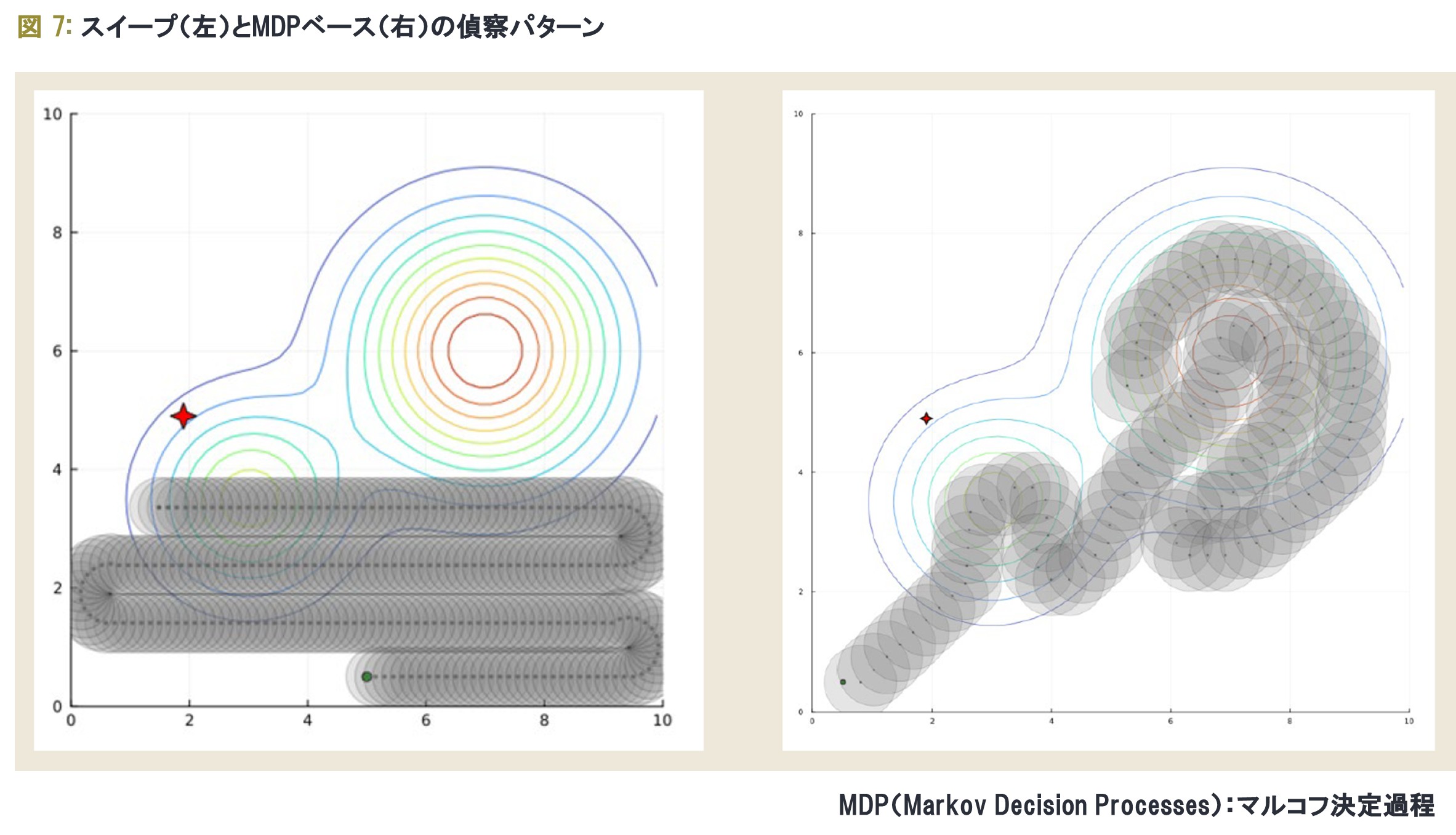 |
しかし、戦場では敵対的な非協力が普通である。だからこそ、スウィープ・パターンは戦闘偵察には不適切である。スウィープ・パターンはあまりにも簡単に発見でき、攻撃側の意図を明らかにしてしまうからである。一旦短距離防空(SHORAD)がパターンを検出すれば、今後の動きを予測するのは容易であり、キル・レートを向上させることができる。そうすることで、防衛側はアクティブ・センサーをオンにする必要さえなく、探知されるのを防ぐことができる。そこで、マルコフ決定過程(MDP)※11を用いて、ランダムで予測不可能に見えるパターンを作り出す新しい偵察戦術を開発した(図7右)。
※11 マルコフ決定過程(MDP, Markov Decision Process)は統計学における確率過程の一種。確率過程は確率的な規則に従って変動する現象やシステムの数学的モデルを指す。そして、マルコフ決定過程は特に、未来の状態や報酬が現在の状態と現在の行動のみに依存するというマルコフ性を持つ確率過程。(参考:https://www.tech-teacher.jp/blog/markov-decision-process/)
一見奇妙に見えるが、統計分析の結果を評価すると強力であることがわかる。平均偵察時間と検出すべき目標数を比較し、誤検出と不検出の仮定を変化させると、このパターンが「ムハメッド・アリのジレンマ(Muhammed Ali dilemma)」を十分に活用し、攻撃者にとって有利であることが明らかになる。さらに、我々の新しいマルコフ決定過程(MDP)偵察パターンでは、ターゲット・エリアに関する事前知識と、地上の現在の状況に関する情報をブレンドすることもできる。最終的に、マルコフ決定過程(MDP)に基づく戦術は、短距離防空(SHORAD)の位置をより確実に検出するだけでなく、スウィープ・アプローチよりもはるかに速く検出することができる。
マルコフ決定過程(MDP)に基づく偵察戦術に協調的な調整を組み合わせることで、偵察スウォームを偵察・打撃スウォームに変え、一部の航空発射効果(ALE)スウォームのメンバーは一時的に偵察モードで行動し、攻撃メンバーはすでに低高度の短距離防空(SHORAD)上空をうろついている。この組み合わせにより、自律的かつインタラクティブな偵察・打撃スウォーム戦術が実現する[41]。この戦術が既存のアプローチより優れているのは、以下の理由による。
- 例えば、電子支援手段(ESM)、合成開口レーダー(SAR)[42]、敵対する短距離防空(SHORAD)システムに関する情報、さらに植生、建物の特性、交通のしやすさ、戦術的地形評価といった地形特有の側面など、事前の情報を効果的に利用する[43]。
- さまざまな検索条件を考慮することで、戦闘効率と有効性を向上させる[44]。
- 固定翼および回転翼の無人航空機システム(UAS)による異種群の使用を可能にする。これは、両方のタイプのアセットが異なる飛行軌道を使用するため、これらの特定の側面を反映した異なる戦術が必要になるためである。
- 敵対者が将来の可能性のある場所に関する仮説[45]を立てて偵察戦術を再調整することにより、短距離防空(SHORAD)システムを再配置できるという事実を考慮する。
5.4. ターゲット割り当てのためのAI戦術
偵察・打撃スウォームに対する自律的な目標割り当ては、任務の成功率を高めることができる特定の要素である。我々は、敵対する短距離防空(SHORAD)システムを攻撃するために非見通し線(NLOS)ミサイルを誘導するために航空発射効果(ALE)を使用するというアイデアを検討した。その結果、2つの基本パターンが浮かび上がった。第一に、偵察または打撃任務を遂行する航空発射効果(ALE)は、図8に示すように、非見通し線(NLOS)ミサイルと目標座標と飛行軌跡を共有することで、非見通し線(NLOS)ミサイルを誘導することを学習する。第二に、航空発射効果(ALE)は「ドア・オープナー(door openers)」として作戦することができる。この機能では、敵のセンサー・ポストを最初に攻撃する。これによって敵の防空態勢に隙間ができ、非見通し線(NLOS)ミサイルはこれを利用して忍び込み、最終目標を攻撃することができる。
 |
「ワイルド・ホーネッツ(Wild Hornets)」のシナリオだけでは、任務の成功に必要な航空発射効果(ALE)の数を確実に測定することはできないし、連続攻撃と同時攻撃のどちらが成功率が高いかを判断することもできない[46]。しかし、アセットが臨機応変に使用され、航空発射効果(ALE)とミサイルの異質なスウォームが予測不可能であることを考えると、最も興味深い特定のパターンを目撃している。航空発射効果(ALE)スウォームのメンバーの任務別消耗率が高すぎる場合、つまり、航空発射効果(ALE)スウォームを成功させるためには多くの航空発射効果(ALE)を失いすぎる場合、航空発射効果(ALE)は目標に対してより強力な非見通し線(NLOS)ミサイルを一時的なバックアップとして呼び寄せることを学習する。
この戦術は、ロシアの76N6クラム・シェル(Clam Shell)のような低高度捕捉レーダーシステムと交戦するオプションを提供することができる[47]。シミュレーションによれば、76N6クラム・シェル(Clam Shell)を下方から攻撃することは、低空飛行する航空発射効果(ALE)の運動エネルギーが攻撃時に電荷を点火するには不十分であるため、実行不可能である。さらに、この作戦は航空発射効果(ALE)を76N6クラム・シェル(Clam Shell)を守る短距離防空(SHORAD)システムの格好の標的にする。しかし、航空発射効果非見通し線(ALENLOS)ミサイルの組み合わせが解決策を提供する可能性がある。
6. 展望:ソフトウェア定義防衛のためのAI戦術カーネル
ドイツのドイツ陸軍コンセプト・能力開発センター(ACCDC)と共同で実施した先進コンセプト研究「ワイルド・ホーネッツ(Wild Hornets)」は、戦力開発に防衛メタバースを利用する利点を示している。我々の発見が示している。地形条件を利用するAI戦術(地形追従)と高度な共同協調により、将来の航空発射効果(ALE)スウォームをより強力にすることができる。これに対して、ゲーム理論からの洞察を活用したAI戦術は、これらのスウォームを撃退するために防空側に力を与えることができる。
現在、防衛メタバースで開発されたAI戦術は、徐々に物理的環境に移行している。ドイツ連邦軍材料・燃料・潤滑油研究所(軍事施設および運用資材科学研究所:Wehrwissenschaftliches Institut für Werkund Betriebsstoffe)とともに、我々は同研究所の将来の無人システムのエコシステムに装備するために使用される適応戦術の生成に取り組んでいる。実戦で成功すれば、これらのAI戦術は作戦に配備されることになる。
このアプローチは、レガシー・システムを補強し、ハードウェアとソフトウェアの同期化された開発の助けを借りて軍隊の変革を進めるために、ドイツ連邦軍がソフトウェア定義防衛に重点を置いていることと一致している[48]。本稿で主張するAI戦術は、将来のソフトウェア定義防衛ソリューションの中核と解釈されるべきである。すでにさまざまな任務の計画策定/支援システムを使用して、センサーからシューターまでのサイクルにアセットを統合している成熟した軍隊は、レガシー・ソフトウェアを完全に尊重し、それと相互作用するオーバーレイ・システムとしてAI戦術カーネルを使用することができる。成熟度の下限にある軍隊は、AI戦術カーネルを使用して、伝統的な任務計画策定システムの機能をカーネルに引き継がせることで飛躍することができる。
図9に示すように、ソフトウェア定義の防衛ソリューションのポートフォリオは幅広い。しかし、今日のソリューションのほとんどは、軍隊が扱う必要のある重要なリソースとしてデータを重視しているため、インプット主導型である。対照的に、AI戦術カーネルのコンセプトはインパクト駆動型である。軍事任務を達成するために何が利用可能かを問うのではなく、AI戦術カーネルは任務がどのようなインパクトをもたらすかを問う。この2つの視点は補完的ではあるが、異なる側面を強調するものである。
この違いはまた、ソフトウェア定義防衛の技術スタックを補完する新たな戦術スタックの基盤を築く。戦術スタックは、サービス指向アーキテクチャを使用する軍隊がドメインや作戦レベルを超えて移動できる価値層として戦術を解釈することで、軍事力を微調整して提供する斬新な方法を提供する。戦術スタックは、部隊要素、プラットフォーム、センサーやエフェクターのようなペイロードの動作を調整することで、戦場の汎用性を高める。さらに、戦術スタックは、第一にドメイン内およびドメイン間で、第二に人間のオペレーターとの間で、プラットフォームとペイロードのエコシステムの相互作用を調整する上で最も重要である。この目的のために、AI戦術カーネルはレガシーおよび将来のソフトウェア・アプリケーションと相互運用可能である必要がある。防衛メタバースは、それぞれの相互作用を訓練し、それぞれのワークフローにおける潜在的な欠陥を浮き彫りにするのに役立つだろう。敵対者に関する進行中の作戦とインテリジェンス情報から特定された教訓は、防衛メタバースの訓練環境を介して統合することができ、現在の国家と同盟国の能力要求、進行中の戦場要件、および将来の部隊のビジョンに沿った継続的なソフトウェア定義開発のための基盤を築くことができる。
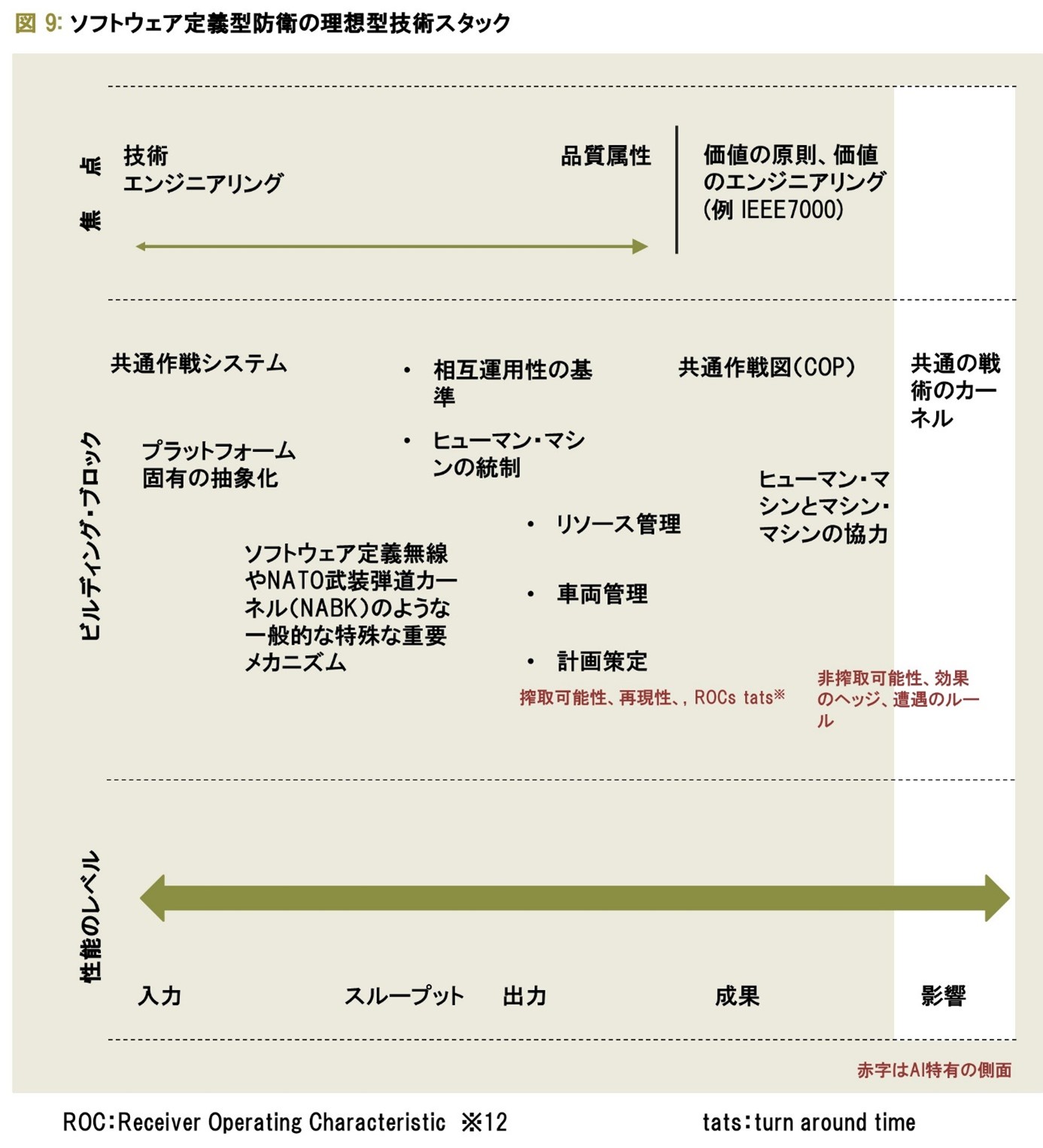 |
※12 ROCとは受信者操作特性(Receiver Operating Characteristic)のことで、観測された信号からあるものの存在を判定する際の基準となる特性という信号処理の概念、tatsとはturn around timeのことで、システムに処理要求を送ってから、処理が完了するまでにかかる時間
文献
“Real-time Airspace Awareness and De-confliction for Future Battles,” DARPA press release, 4 July 2020, https://www.darpa.mil/news-events/2020-04-07 (last accessed 1 July 2024).
Arthur, Gordon, “US approves loitering munitions sale for Taiwan’s ‘porcupine strategy,’” C4ISRNet, 20 June 2024, https://www.c4isrnet.com/battlefield-tech/2024/06/20/us-approves-loitering-munitions-sale-for-taiwans-porcupine-strategy/ (last accessed 28 August 2024).
Borchert, Heiko, “The Very Long Game of Defense AI Adoption: Introduction,” in Heiko Borchert, Torben Schütz, and Joseph Verbovszky (eds.) The Very Long Game. 25 Case Studies on the Global State of Defense AI (Cham: Springer Nature, 2024), pp. 1-38, https://link.springer.com/chapter/10.1007/978-3-031-58649-1_1 (last accessed 28 August 2024).
Borchert, Heiko, Torben Schütz, and Joseph Verbovszky, “Mater and Servant: Defense AI in Germany,” in Heiko Borchert, Torben Schütz, and Joseph Verbovszky (eds.) The Very Long Game. 25 Case Studies on the Global State of Defense AI (Cham: Springer Nature, 2024), pp. 197-218, https://link.springer.com/chapter/10.1007/978-3-031-58649-1_9 (last accessed 28 August 2024).
Borchert, Heiko, Christian Brandlhuber, Armin Brandstetter, and Gary S. Schaal, Free Jazz on the Battlefield. How GhostPlay’s AI Approach Enhances Air Defense. DAIO Study 22/03 (Hamburg: Defense AI Observatory, 2022), https://defenseai.eu/daio_study2203 (last accessed 28 August 2024).
Brandlhuber, Christian, “Superiority on the Battlefield with Tactical AI and Emergence. The Next Generation,” NATO Science and Technology Organization, Lecture Series on AI, SET-290-RLS.
Bremer, Maximilian K. and Kelly A. Grieco, “The Air Littoral: Another Look,” Parameters, 51:4 (Winter 2021-22), pp. 67-80, https://press.armywarcollege.edu/parameters/vol51/iss4/7/ (last accessed 28 August 2024).
Bronk, Justin and Jack Watling, Mass Precision Strike. Designing UAV Complexes for Land Forces (London: RUSI, 2024), https://www.rusi.org/explore-our-research/publications/occasional-papers/mass-precision-strike-designing-uav-complexes-land-forces (last accessed 28 August 2024).
Brose, Christian, The Kill Chain. Defending America in the Future of High-Tech Warfare (New York: Hachette Books, 2020).
Clark, Bryan, Dan Patt, and Timothy A. Walton, Implementing Decision-Centric Warfare: Elevating Command and Control to Gain an Optionality Advantage (Washington, DC: Hudson Institute, 2021), https://www.hudson.org/national-security-defense/implementing-decision-centric-warfare-elevating-command-and-control-to-gain-an-optionality-advantage (last accessed 28 August 2024).
Clark, Bryan, Dan Patt, Harrison Schramm, Mosaic Warfare. Exploiting Artificial Intelligence and Autonomous Systems to Implement Decision-Centric Operations (Washington, DC: CSBA, 2020), https://csbaonline.org/research/publications/mosaic-warfare-exploiting-artificial-intelligence-and-autonomous-systems-to-implement-decision-centric-operations (last accessed 28 August 2024).
Digital Engineering Strategy (Washington, DC: Office of the Deputy Assistant Secretary of Defense for Systems Engineering/Department of Defense, 2018), https://apps.dtic.mil/sti/citations/AD1068564 (last accessed 28 August 2024).
Flynn, Karl, “Counterswarming Is Imperative,” Proceedings, 150:8 (August 2024), https://www.usni.org/magazines/proceedings/2024/august/counterswarming-imperative (last accessed 28 August 2024).
Freedman, Lawrence. Strategy. A History (Oxford: Oxford University Press, 2013).
Grayson, Tim, “Mosaic Warfare,” DARPA presentation, 27 July 2018, https://www.almendron.com/tribuna/wp-content/uploads/2019/07/sto-mosaic-distro-a.pdf (last accessed 28 August 2024).
Haystead, John, “DARPA’s Mosaic Warfare: Moving to Address the Ever-More-Rapidly Paced Advances/Changes in Fielded Threat Capabilities,” The Journal of Electronic Defense (February 2020), pp. 20-24.
Hicks, Kathleen, “’Unpacking the Replicator Initiative’ at the Defense News Conference,” Department of Defense, 6 September 2023, https://www.defense.gov/News/Speeches/Speech/Article/3517213/deputy-secretary-of-defense-kathleen-hicks-remarks-unpacking-the-replicator-ini/ (last accessed 28 August 2024).
Johnston, Chris, “Muhammad Ali’s best quotes: ‘Float like a butterfly, sting like a bee.’” The Guardian, 4 June 2016, https://www.theguardian.com/sport/2016/jun/04/muhammad-ali-greatest-quotes-sting-butterfly-louisville-lip (last accessed 28 August 2024).
Kratzke, Thomas, Lawrence D. Stone, and John R. Frost, “Search and Rescue Optimal Planning System,” 13th International Conference on Information Fusion, Edinburgh, 26-29 July 2010, https://ieeexplore.ieee.org/document/5712114 (last accessed 28 August 2024).
Lucas, Clifford, “The Drone Dilemma of the U.S. Air Force,” War on the Rocks, 7 May 2024, https://warontherocks.com/2024/05/the-drone-dilemma-and-the-u-s-air-force/ (last accessed 28 August 2024).
Magid, Jacob and Amy Spiro, “April 13: Iran fires 300 missiles and drones; most intercepted; minor damage at IDF base,” Times of Israel, 13 April 2024, https://www.timesofisrael.com/liveblog-april-13-2024/ (last accessed 28 August 2024).
Pettyjohn, Stacie, Evolution Not Revolution. Drone Warfare in Russia’s 2022 Invasion of Ukraine (Washington, DC: CNAS, 2024), https://www.cnas.org/publications/reports/evolution-not-revolution (last accessed 28 August 2024).
Stephenson, Neal, Snow Crash (New York: Bantam Books, 1992).
Targeting. United States Air Force Doctrine Publication 3-60 (Maxwell AFB: United Stats Air Force, 2021). https://jdeis.js.mil/jdeis/new_pubs/jp3_60.pdf (last accessed 28 August 2024).
Wolff, Christian, “Radar Clutter,” undated, https://www.radartutorial.eu/11.coherent/co04.en.html (last accessed 28 August 2024).
Work, Robert O. and Shawn Brimley, 20YY: Preparing for War in the Robotic Age (Washington, DC: CNAS, 2014), https://www.cnas.org/publications/reports/20yy-preparing-for-war-in-the-robotic-age (last accessed 28 August 2024).
ノート
[1] Johnston, “Muhammad Ali’s best quotes.”
[2] Freedman, Strategy, p. ix.
[3] Work/Brimley, 20YY.
[4] Hicks, “’Unpacking the Replicator Initiative’ at the Defense News Conference.”
[5] Arthur, “US approves loitering munitions sale for Taiwan’s ‘porcupine strategy.’”
[6] Pettyjohn, Evolution Not Revolution.
[7] Magid/Spiro, “April 13: Iran fires 300 missiles and drones; most intercepted; minor damage at IDF base.”
[8] Brose, The Kill Chain.
[9] Grayson, “Mosaic Warfare;” Haystead, “DARPA’s Mosaic Warfare; Clark/Patt/Schramm, Mosaic Warfare.
[10] Borchert/Brandlhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, pp. 12-17; Borchert, “The Very Long Game of Defense AI Adoption: Introduction,” p. 7.
[11] Stephenson, Snow Crash.
[12] Digital Engineering Strategy, p. 3.
[13] See also: Clark/Patt/Walton, Implementing Decision-Centric Warfare.
[14] On the contested paradigms informing the division of responsibilities between air and land forces for air littoral operations, see: Bremer/Grieco, “The Air Littoral: Another Look,” pp. 75-78.
[15] “Real-time Airspace Awareness and De-confliction of Future Battlespaces.”
[16] Bremer/Grieco, “The Air Littoral: Another Look,” p. 72.
[17] See also: Lucas, “The Drone Dilemma of the U.S. Air Force;” Bremer/Grieco, “The Air Littoral: Another Look,” p. 80.
[18] Bronk/Watling, Mass Precision Strike, pp. 6-21.
[19] Borchert, “The Very Long Game of Defense AI Adoption: Introduction,” pp. 6-8, 33-34.
[20] See for example: https://www.knds.de/en/systems-products/tracked-vehicles/air-defence-systems/gepard-1-a2/ (last accessed 28 August 2024).
[21] 対スウォーミングにおける防空砲の役割についてのより一般的な議論については、以下を参照のこと。フリン(Flynn)著「スウォーミングへの対抗が不可欠」を参照。ワイルド・ホーネッツ(Wild Hornets)が砲ベースの短距離防空(SHORAD)システムに焦点を当てていることを強調しておく。 したがって、ワイルド・ホーネッツ(Wild Hornets)の研究の範囲外であったミサイル・ベースの短距離防空(SHORAD)システムに我々の結果を転用することはできない。
[22] Acoustic sensors for ALE detection have not been considered.
[23] NATO Ballistic Kernel(NABK)に基づく弾道モデルは、防衛メタバース(Defense Metaverse)で使用可能であるが、評価が非機密であったため、ワイルド・ホーネッツ(Wild Hornets)には使用されていない。
[24] For more details, see: https://www.avinc.com/lms/switchblade-600 (last accessed 28 August 2024).
[25] ドイツ連邦軍の無人航空機(UAV)サプライヤーとの協力のもと、我々は無人航空機(UAV)モデルをさらに改良し、さまざまな無人航空機(UAV)の真の飛行特性に合わせて調整できるようにした。
[26] For more details, see: https://www.rafael.co.il/system/spike-nlos/ (last accessed 28 August 2024).
[27] For more details, see: https://www.rtx.com/raytheon/what-we-do/integrated-air-and-missile-defense/coyote (last accessed 28 August 2024).
[28] For an overview of the different forms of surface, volume or point clutter, see: Wolff, “Radar Clutter.”
[29] 海軍大学院のDavid C. Jenn教授は、自由に利用できるMatlabスクリプトとしてPOfacetsを開発した。このソフトウェアの助けを借りて、モノスタティックおよびバイスタティックRCSを3次元コンピュータ支援デザイン(CAD)オブジェクトに基づいて計算することができる。POfacetsは、レーダーやレーザーの断面積を計算するために特別にデザインされている。詳しくは、https://faculty.nps.edu/jenn/(最終アクセス2024年8月28日)を参照されたい。
[30] 読者は、我々が発見したことを一般化し、あまり詳細に語ることを控えることを心に留めておいてほしい。
[31] ワイルド・ホーネッツ(Wild Hornets)で使用されている防衛メタバースには、大雨、霧、雪と氷、薄明かり、暗闇といったさまざまな天候モードが用意されている。
[32] 成功とは、少なくとも1つの航空発射効果(ALE)が短距離防空(SHORAD)システムを貫通し、ターゲット上で爆発できたことを意味する。
[33] We ran a total of 1.8M scenarios.
[34] RWS have been modelled based on currently available systems.
[35] See for example the following promotional videos available on YouTube: https://www.youtube.com/watch?v=pb5_F4_Eod8; https://www.youtube.com/watch?v=y4d2d77RtfI&t=1s (last accessed: 27 August 2024)
[36] Borchert/Brandlhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, p. 14; Brandlhuber, “Superiority on the Battlefield with Tactical AI and Emergence,” p. 9.
[37] 逐次攻撃と同時攻撃のどちらが成功するかは、敵対者の短距離防空(SHORAD)コンステレーションと防空戦術に大きく依存する。敵対する防空部隊の間で防空任務が動的に配分される場合、連続攻撃は不利になる可能性がある。これとは対照的に、セクターごとの担当区域を設定すれば、1つのシステムを集中的に狙うことができるため、航空発射効果(ALE)スウォームが成功する確率が高まる。シミュレーションの結果、異なる方向からの同時攻撃はより有望であることが示唆された。
[38] 「分散型部分観測マルコフ決定プロセス」(DecPOMDP)は強化学習法によって解かれた。
[39] 「ウクライナ戦争では、ドローンはスウォームではなくスタックで運用されている。 (中略)ウクライナ戦争におけるドローン・スタックは、ソフトウェアベースのバトルネットワークや伝統的な通信手段を用いて、複数のドローン・オペレーターによって調整されている」。ペティジョン『革命ではなく進化』39-4頁
[40] See for example: Kratzke/Stone/Frost, “Search and Rescue Optimal Planning System.”
[41] 「自律性(autonomous)」とは、さまざまなレベルの人間が関与する任務を指す。偵察部隊と打撃部隊は、従来の指揮・統制(C2)ループや司令部へのリーチバックに頼ることなく、直接相互に影響し合う。しかし、人間のオペレーターは、ミッション全体の目標と達成すべき影響を定義するため、関与し続ける。これらのパラメータの範囲内で、開発された偵察・攻撃戦術は、航空発射効果(ALE)スウォームが独立して行動することを可能にする。
[42] 我々は現在、合成開口レーダー(SAR)に基づく情報をターゲット割り当てに統合することに取り組んでいる。
[43] 戦術的地形評価は、敵対者が航空発射効果(ALE)群に対して最高の撃破率(kill rates)を達成するために使用するであろう短距離防空(SHOARD)システムの推定位置に関する情報を提供する。
[44] 検討中のターゲットする地域に湖や起伏の多い地形がある場合、敵対者これらの場所を短距離防空(SHORAD)の場所として使用する可能性は比較的低いため、これらの地域をかなり迅速に通過することができる。
[45] 戦術的な地形評価、航空発射効果(ALE)のスウォームとの交戦に成功した過去の場所、敵対する短距離防空(SHORAD)システムに関するインテリジェンス、その他の考慮事項が、これらの仮説を立てる上で役割を果たす。
[46] The main reason is that ALE swarms did the job without the need for missiles.
[47] For more on this system, see: https://www.ausairpower.net/clamshell.html (last accessed 28 August 2024):
[48] Borchert/Schütz/Verbovszky, “Master and Servant: Defense AI in Germany,” p. 201.