沈む前に考える -海戦のための赤部隊と青部隊のAI戦術-(Defense AI Observatory)
MILTERMでは、人工知能(AI)を軍事に適用するGhostPlayのプロジェクトで行われている「戦場におけるAI戦術の役割」を取り上げた白書3部作のうち2つの論文を紹介してきた。ひとつは「戦場におけるフリー・ジャズ -GhostPlayのAIアプローチはどのように防空を強化するか- (Defense AI Observatory)」、もうひとつは「目に見えないものは手にも打てない -作戦を成功させるためのAI戦術の出現- (Defense AI Observatory)」である。今回紹介するのは海戦におけるAI戦術を扱った3本目の論文である。これまで論じてきた地上をベースとした戦場におけるAI戦術の案出を海上をベースとした場合の適用について考察している。考察にあたってはウクライナが無人水上機(USV)と無人航空機(UAV)を用いた例などを参考にしている。
一方で、2025年6月1日に、ウクライナは「クモの巣」作戦(Operation Spider Web)を行いロシア戦略爆撃機など41機破壊したとの報道もあり、ウクライナは検討の域を出てAIを駆使し実践で既に成果を上げているとも思える。
今回のウクライナの衝撃的な作戦は、防衛分野におけるAIの使用を前提とする無人機の活用を促進することになるだろう。しかし、防衛分野でのAIを使用することについて様々な観点から考察しなければならない課題はまだまだ残っているのかもしれない。(軍治)
![]()
沈む前に考える
海戦のための赤部隊と青部隊のAI戦術
Thinking Before Sinking
Red and Blue AI Tactics for Naval Combat
Heiko Borchert, Christian Brandlhuber, and Jeronimo Dzaack
DAIO Study 25|27
1 まとめ
メーデー、メーデー。聞こえますか?我々は沈没している。
こちら、ドイツ沿岸警備隊。
我々は沈んでいる。我々は沈んでいる。
何を 「考えて 」いる?[1]
沈んでいるのか、考えているのか?冒頭の引用は、オスロのベイツ・ユナイテッドが制作した2006年の伝説的なベルリッツの広告から。語学コースを提供する会社に期待される通り、この広告は外国語を話すことが生死にかかわる問題であることを完璧に表現している。しかし、冗談はさておき、この質問にはドイツの沿岸警備隊員の厚いアクセント以上のものがある。むしろこの質問は、到達目標を達成するために軍事力をどのように活用するのがベストかという核心に迫っているのだ。
以前の論文[2]の読者は、人工知能 (AI) が軍事任務 (この場合は沈没) を達成するための複雑な戦術を開発することを学習 (= 思考) することを証明しようとしていることをご存知だろう。「沈む前に考える(Thinking Before Sinking)」 では、事前定義された人間の計画やパラメータ化なしで、AI が高速艇のスウォームに対して複雑な攻撃戦術 (赤) を開発することを実証した。また、AI ベースのポリシーにより、近接防空システム (CIWS) などの青部隊防衛ソリューションのターゲット ・シーケンスが改善されることも示しており、これはシミュレーション実行で任務成功率が高くなることで示されている[3]。最後に、AI ベースの 近接防空システム (CIWS) 調整により青部隊の任務成功率が向上することを示している。シミュレーション結果は、AI ベースの調整が火力の集中以上の軍事的価値をもたらすことを示している。我々の協調的調整戦術は、軍事調整の課題が複雑になるほど優れており[4]、それによって利用可能な自衛システムの有効性と効率性が大幅に向上する。
これらの研究結果が重要なのは、海軍が対等な海軍紛争の再燃に直面するだけでなく、技術の進歩によって、劣勢の海軍にも既存の海軍や商船に挑戦する機会が与えられているからである。今日の脅威環境において、青部隊の高価値海軍プラットフォームは、容易に赤部隊の高価値ターゲットとなる。争奪戦が繰り広げられる海軍戦域と水上プラットフォームの限られた積載能力は、海軍艦艇の最適な武装に課題をもたらす。「司令官は、防御用迎撃ミサイルの搭載量を選択する際に、想定される任務よりも能力の高い方に偏りがちで、搭載する迎撃ミサイルのコストが増加する可能性がある」と、紅海での海戦(Naval Combat)から得られた初期の教訓を振り返り、米空母打撃群第2の司令官、カボン・ハキムザエ少将は指摘した[5]。
彼のコメントは、想定される敵対的脅威に対応するための最適な兵器を判断するために、海軍の任務に先立って入念な計画を立てることの重要性を改めて認識させてくれる。我々の論文が示すように、AIを活用した高度なシミュレーションは、さまざまなエフェクターの組み合わせをどのように最適化すれば効果的な対抗手段となるかを示すことで、この課題に貢献できる。さらに、彼の発言は戦闘の経済的側面を強調している。高価値アセットは高価である。ドワイト・D・アイゼンハワーのような米空母の年間運用コストは、航空団の費用を除いて「約6億5,740万ドル」であり、例えばSM-2ブロックIIICのような中距離地対空ミサイルは「1発あたり約250万ドル」かかる[6]。これらのアセットを利用する際の労力削減は重要であり、協調的調整を通じて労力削減を促進するAIは、任務の有効性と効率性を大幅に向上させる。
これは、兵站上の課題への取り組みにも関連している。変化する海上脅威に対応するため、海軍は分散と分配の必要性を重視している。
複数のアセットに能力を分散させることで、赤部隊が青部隊を無力化することがより困難になる一方で、その分散は補給安全保障に関する新たな問題を提起する。これは、赤部隊が青部隊の補給線を混乱させる能力、すなわち、争奪戦における兵站に関するより広範な議論と関連している[7]。我々の研究結果は予備的なものではあるが、AI戦術がこの難問を打開する可能性のある方法を示しているように思われる。脅威に対抗する上でより効果的なアセットは、補給安全保障の負担を軽減する可能性が高い。
要約すると、本稿で論じた海軍における探究的な赤部隊と青部隊の AI 戦術は、2021 年に開始された能力および技術開発プロジェクトの次のフェーズである GhostPlay@SEA の基礎を提供するものである (下記を参照)。GhostPlay@SEA は、関連する戦域における高度な即応性とプレゼンス、敵対的な攻撃を撃退するための適切な兵器システムの使用、および無人アセットと AI のための高度な技術の使用の必要性を強調するドイツ海軍の新しいビジョンに溶け込んでいる[8]。この文脈で、GhostPlay@SEA は、協調型機械学習と強化学習戦術を陸空コンステレーションから海軍ドメインに移転する。到達目標は、これらの戦術の使用を、無人システムのドメイン固有のスウォームからマルチドメインでの使用に拡大し、マルチドメインの対スウォーム戦術を開発することによって、さまざまなドメインにまたがる無人アセットによる攻撃に備えることである。
これは、戦場におけるAI戦術の役割を取り上げるシリーズの3番目の論文である。これらの論文は、赤部隊のAI戦術と青部隊のAI戦術の開発を目的とした能力・技術開発プロジェクトであるGhostPlay※1から発展したものである。2022年に発表された最初の論文「Free Jazz on the Battlefield」では、中核となるアイデアを提示し、基本的な手法の重要な側面(分散型で非階層的な指揮統制の活用など)について説明し、攻撃スウォームに対する防空の役割に焦点を当てた初期の研究結果を発表した。2024年9月に発表された2番目のホワイトペーパー「目に見えないものは手にも打てない(His Hands Can’t Hit What His Eyes Can’t See)」では、地上ベースの防空システムに対する空中発射効果のスウォームに対する赤部隊のAI戦術と青部隊のAI戦術の活用について論じた。この論文では、協調的調整を重要な任務要件として提示し、完全に自律的な偵察攻撃のスウォーム戦術への活用について論じた。
※1 GhostPlay は、複雑な軍事的交戦のためのAI ベースの戦術をマシン・スピードで訓練、視覚化、分析するための戦場のバーチャル・ツインである。「”Ghost”は現実の高性能バーチャル・ツインである。”Play “は、このようなバーチャル・ツインにおいて、AI が制御する赤と青のフォース・プラットフォーム・アバターの挙動を実証する。(参考:https://www.ghostplay.ai/)。本稿中にあるGhostPlay@SEAは、海洋版のGhostPlayである。
2 荒波の前途
海軍紛争の現状とその結果についての考察
海洋ドメインは脆弱である。その脆弱性は、大国、新興国、そして準大国間の利害対立、そして海を輸送手段、資源、居住地、そして権力行使の手段として利用する暴力的な非国家主体によって生じている[9]。英国国防省の前の開発・コンセプト・ドクトリンセンター(DCDC)が主張するように、海軍の任務を形作る将来の作戦環境は、より競争が激しく、複雑で、混雑し、繋がり、制約が増すだろう[10]。紅海と黒海における最近の紛争は、これらの要素の一部を改めて浮き彫りにし、将来の海軍紛争のあり方を(部分的に)垣間見せている。以下の予備的な知見は、我々の分析に特に関連している。
ダイナミックな陸と海の相互作用
無人水上機(USV)と無人航空機(UAV)をミサイルと組み合わせて使用することで、陸海間の相互作用が活発化している。本分析の焦点である沿岸地域では、距離はもはや安全圏とは言い難い[11]。例えばウクライナは、無人水上機(USV)と無人航空機(UAV)を駆使した陸上部隊で300海里先のロシアのターゲットを攻撃し、海岸線を大幅に「延長」した。同様に、イランとフーシ派は、無人航空機(UAV)とミサイルを組み合わせてかなりの距離から船舶を攻撃できることを示している[12]。米海軍がフーシ派による史上初の対艦弾道ミサイル使用で示したように[13]、よく訓練され装備の整った海軍がこれらの脅威に効果的に対抗できることは事実だが、防御力が手薄な軍艦や商船には当てはまらないかもしれない[14]。
海軍航空戦とミサイル戦の復活
現在の紛争は、海軍の航空戦力およびミサイル戦力への大規模な投資の必要性を強く浮き彫りにしている。無人システム、対艦巡航ミサイル(ASCM)、対艦弾道ミサイル(ASBM)は、水上プラットフォームにとって大きな脅威であり、近接防空システム (CIWS)などの防護システムの発展を促す可能性が非常に高い[15]。現在のシステムは、より長距離のエフェクターを必要とするより広範囲のエリアと、より短距離の迎撃ミサイルを必要とする特定のポイント・ターゲットを同時に防御するために、センシング・ソリューションとエフェクターを再調整する必要があるという課題に直面している[16]。
係争化する兵站
敵の海岸線付近で作戦行動をとる際に、ますます多様なエフェクター・ポートフォリオが必要となるため、コンセプト開発者や計画立案者は、熾烈な兵站に対処するための斬新なソリューションに重点を置く必要がある。例えば、補助艦艇、多目的支援艦艇(これらは魅力的なターゲットとなる可能性もあるが)、そして有人支援プラットフォームと無人支援プラットフォームの新たな組み合わせといった、海上における多様な兵站拠点の必要性が高まる可能性がある[17]。さらに、量(mass)の価値は「プラットフォームの搭載量によって制限される」ため、限定的となる可能性がある[18]。
クロス・ドメインの相互作用
海上では、乗組員は一つの脅威だけに集中することはできない。むしろ、上記の研究結果は、沿岸部での作戦のクロス・ドメイン的な性質を改めて浮き彫りにしている。黒海と紅海における海戦(Naval Combat)もまた、第三者情報の価値を浮き彫りにしている。例えば、2024年前半、米国はウクライナに対し、衛星ベースのインテリジェンス、監視、偵察データを1日30回以上提供した。同様に、ロシアは商船攻撃のためにフーシ派と衛星データを共有している[19]。しかし、データ共有には適切なデータ共有フレームワークが必要である。例えば、英国海軍の駆逐艦は「現在、イージス・ベースライン9を装備した米艦艇のように、(多機能高度データリンク)を介してデータをダウンロードする協力的交戦能力や能力を備えていない」[20]。さらに、入ってくる交戦データは評価する必要がある。紅海において、米海軍はかつて2週間かかっていた作業を2日で完了できることを示したが、これには「大量の通信帯域が必要」だった[21]。
適応性
最後に、上記の研究結果は、適応性が重要な要件であることを示唆している。例えば、紅海における無人システムとのハイブリッド戦闘を成功させるために、米海軍は「既存のシステムと戦術、技術、手順を微調整」する必要があった[22]。この結果、米海軍は既存のアセットを様々な方法で活用するようになった。「無人水上機(USV)に対するヘルファイア(Hellfire)の使用、空対空、航空プラットフォームによる無人航空機(UAV)の撃墜」などである[23]。こうした調整やその他の改善は、戦場工学(battlefield engineering)の価値を強調するものであり、専門家は「兵器システムからデータを取得し、戦術を学習・改善」して、新たな攻撃者の行動に対応できるようになる[24]。
コンセプト開発者は、これらの課題やその他の課題にどのように対応すべきか、と疑問に思うかもしれない。現在開発中の様々なコンセプトの中で、分散型部隊が重要な役割を果たすモザイク戦(Mosaic Warfare)は、我々のアプローチに最も関連している。モザイク戦(Mosaic Warfare)は、ジョン・ボイドが考案したフォース・デザインと、観察(Observe)、指向(Orient)、決定(Decide)、行動(Act)ループを再解釈するものである[25]。軍事計画担当者の間では著名なこのループは、ほとんどの軍隊が敵対者に対する意思決定の優位性を高めるために、ループの加速と短縮に重点を置いている。そのため、ほとんどの取り組みは、統合の状況認識と理解(観察(Observe)、指向(Orient))と精密な交戦(行動(Act))の最適化に重点を置いており、中核となる意思決定プロセスはあまり重視されていない。
これは、米国国防高等研究計画局(DARPA)が開発したモザイク戦(Mosaic Warfare)が着目している視点である。このコンセプトは、軍事作戦を成功させるには、既存の部隊を小規模な基本単位部隊に包括的に分解し、戦役時に任務要件と敵部隊の脅威に応じて再構成する必要があると想定している(表1)[26]。したがって、指揮・統制(C2)関係は「望ましい指揮・統制(C2)構造をサポートする通信アーキテクチャの構築ではなく、通信の可用性に従う」ことになる[27]。したがって、モザイク戦(Mosaic Warfare)は「敵に複数のジレンマを課す」[28]ことを意味する、非階層的で大幅に分散化された意思決定アプローチ[29]を提案している。
モザイク戦(Mosaic Warfare)の実践では、英国海軍の「プロテアン海上部隊」※2構想において重要な位置を占める適応力が重視される。プロテアン部隊(Protean force)の中核を成すのは、不確実性に対処するための即興性と革新性である[30]。したがって、プロテアン部隊(Protean force)は、適応を成功させるための重要な原則として、「直線性や規則性ではなく、創発性」を重視する[31]。モザイク戦(Mosaic Warfare)が示唆するように、このようなプロテアン部隊(Protean force)は「状況の要求に応じて形態と焦点を変化させる」。このコンセプトは、「高度に特化されたプラットフォーム」を最適化するのではなく、「相互依存的で交換可能なシステムコンポーネントを備えた部隊」を重視しており、装備中心の考え方を超えて、「部隊の哲学的および知的基盤を包含」している[32]。
※2 「プロテアン海上部隊」とは、基本的にバランスが取れており、生来の順応性を備えているものである。「プロテアン海上部隊」のプロテアン(Protean)はホメロスの「海の老人」に由来し、常に形や姿を変えることができる(オックスフォード英語辞典)。 より馴染みのある「ハイブリッド」という言葉では、海上自衛隊に内在する適応性、柔軟性、選択性を適切に表現できないとしている。(参考:https://assets.publishing.service.gov.uk/media/6315d3ad8fa8f5423d3d5439/20220629-Maritime_Operating_Concept__OFFICIAL___Publication.pdf)
表1: キル・チェーンからモザイク戦(Mosaic Warfare)へ
| 分散型キル・チェーン | システム・オブ・システムズ | 適応型キル・ウェブ | モザイク戦 | |
| アプローチ | 既存システムの手動による統合 | 複数の戦闘形態に対応するシステム | 任務前にあらかじめ定義されたエフェクト・ウェブを選択する半自動化機能 | 戦役時に新しいエフェクト・ウェブを構成する能力 |
| 利点 | ・有効射程距離の拡大
・交戦機械の増加 |
・より迅速な統合と多様なキル・チェーンの実現
・コロケーション設備※3の撤去でより大きな効果が可能 |
・任務前の適応が可能
・敵対者により致死的にし、複雑性を課す |
・動的な脅威や環境に適応可能
・多数の同時交戦への拡張性 |
| 課題 | ・静的
・構築に時間がかかる ・作戦や規模拡大が難しい |
・拡張性に限界がある
・新しい能力を即座に追加できない |
・静的な「プレー・ブック」
・キル・チェーンの数に制限がある ・拡張性が低い |
・人間の意思決定者によって制限される規模 |
出典: Gryson 「モザイク戦(Mosaic Warfare)」 p. 11、Clark/Patt/Schramm 「モザイク戦(Mosaic Warfare)」p. 29.
※3 コロケーション(co-location)とは、所有者や運用者が異なる設備や機器を同じ施設にまとめて設置すること
適応性に加え、敵対者のコンセプトを考察すると、もう一つの重要なデザイン原則、すなわち時間的弾力性が明らかになる。西洋の考え方は、ハイパーウォーのコンセプト[33]に見られるように、敵対者を圧倒するためにスピードを重視する傾向がある。対照的に、敵は「反応を誘発しないようにゆっくりと、あるいは否定的に行動することによって(…)、あるいは政策が不明確で、潜在的な反応が遅すぎる、あるいは効果がない分野では迅速に行動することによって(…)」、挑戦者を出し抜こうとする[34]。
時間的側面に対する繊細なアプローチとモザイク戦(Mosaic Warfare)やプロテアン部隊(Protean force)の考え方を組み合わせることで、新たなパラダイムの基盤が構築される。これは、OODAループを単純に圧縮するのではなく、意思決定に利用可能な時間を最大化することで時間的な余裕を最大限に活用することを目指す。既に議論されているように[35]、マルコフ決定過程(MDP)の数学的枠組みと、その部分観測可能または連続時間ケースへの拡張は、この目標を実現するための最適なアプローチの1つとなる。最終的にこのアプローチは、O-O-D-Aタスクを、各タスクを任意の時点で実行するのに最適な連合効果ウェブ内のノードに委任することで、シーケンシャルなOODAループを分解する。この分解によって並列処理が大幅に進歩する。なぜなら、各サブサイクルが効果ウェブに組み込まれるため、効果ウェブ全体で複数の独立しながらも調整されたO-O-D-Aサブサイクルを実行できるようになるからである。その結果、OODAサイクルはネットワーク内に「隠れる」ことになり、敵対者がそれを特定・検知し、ひいては意思決定を否定・劣化させることはほぼ不可能となる。後述するように、この新しいパラダイムは協調的(自己)調整の論理の基盤となっている[36]。
3 ブラック・パール
海戦(Naval Combat)のための防衛メタバースの調整
「ブラック・パール」は、『パイレーツ・オブ・カリビアン』に登場するジャック・スパロウが指揮する架空の船である。この船は、我々が実施した実現可能性調査(本稿で概要をまとめている)のコードネームである。この調査は、陸空任務向けに開発された赤部隊のAI戦術と青部隊のAI戦術を海軍ドメインに転用できるかどうかを調査するものである[37]。到達目標は、「ブラック・パール」のような高価値目標を、攻撃的な高速艇のスウォームから防衛するための、確率論的に最適な戦術を開発することだった。
3.1 シナリオ
「ワンダーランド」は、同盟国の「ブルーランド」が戦略的に重要な物資を海上で提供することを期待している。図 1 に示すように、「ブルーランド」のタンカーは西からロング・シーに入っている。「ブルーランド」はまた、船団護衛と、「ワンダーランド」が自由に開通した海上交通路にアクセスできるようにするためにフリゲート艦を提供している。「ワンダーランド」の隣国の宿敵である「ヴァルカーノ」は、長年「ワンダーランド」の海上交通を妨害してきた。ロング・シーの入り口近くに戦略的に位置する「ヴァルカーノ島」は、海軍の嫌がらせ任務を行うのに理想的な拠点となっている。ヴルカーノは、有人および無人の高速艇のスウォームを使って「ワンダーランド」の商業航路を妨害および遅延させ、輸送費の高騰を招いて経済的損害を与えている。「ヴァルカーノ」は定期的にタンカーに乗り込み、商業船を守るために戦域に送り込まれた海軍プラットフォームを攻撃するという積極的な任務も実行している。
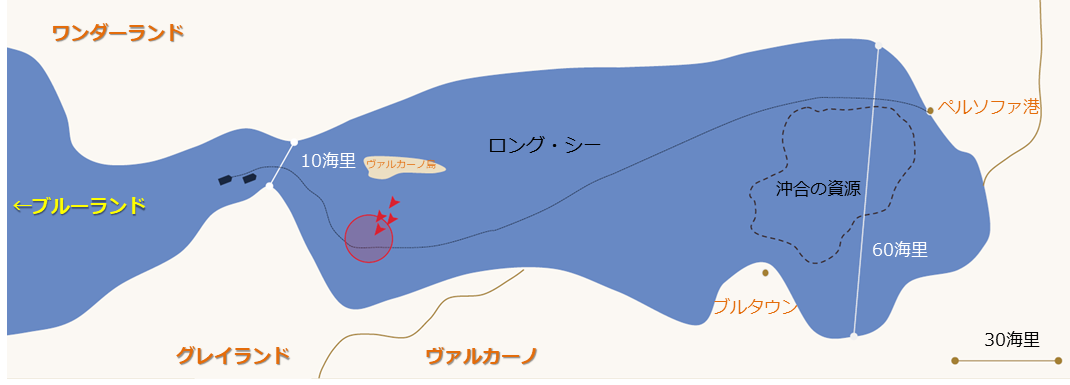
図1:タンカー防護任務 |
3.2 赤部隊と青部隊のモデル
上述の通り、高速艇のスウォームは商船や海軍プラットフォームにとって重大な脅威となる。「ブラック・パール」では、表2にまとめた詳細に基づいて高速艇のスウォームをモデル化し、赤部隊の調整戦術を開発した。具体的な環境要因、例えば専用の波浪モデルはまだモデル化されていない。しかし、海況の変化や風の影響は、確率命中率を通じて暗黙的に考慮されている。
表2: 赤部隊のプラットフォームの特徴
| プラットフォーム | 長さ
(m) |
ビーム
(m) |
喫水
(m) |
推進力 | 速度
(ノット) |
センサー | 兵器システム |
| トンダール(Tondar)
高速攻撃艇 |
38.6 | 6.8 | 2.7 | ディーゼル・エンジン3基
シャフト3本 |
35 | SR-47A 海上捜索レーダ
Type 341火器完成レーダ |
双発ミサイルランチャー(Qader AShM)2基
AK-230連装砲2基 23mm連装砲2基 |
| セラジ(Seraj)
高速艇 |
15.5 | 4.4 | .75 | ディーゼル・エンジン2基 | 75 | なし(ナビゲーションを除く) | 12.7mm機関銃
107mm12連装多連装ロケット砲 |
| ペイカップ(Peykaap)
ミサイル艇 |
17.3 | 3.75 | 0.7 | ディーゼル・エンジン2基
プロペラ |
52 | 電気工学(EO)センサー
火器完成レーダ |
単一対艦ミサイル2基
324mm魚雷発射管2基 |
| タレグ(Taregh)高速艇
(ボハマーRL- 118/130) |
13 | 2.7 | 0.7 | ディーゼル・エンジン2基
シャフト2本 |
46 | 海上捜索レーダ | RPG7 ロケット・ランチャー
12.7mm機関銃 106mm 無反動砲 107mm12連装多連装ロケット砲 |
| シャヒード・ナゼリ(HARTH 55) | 55 | 14.1 | シャフト2本 | 38 | 不明 | 遠隔操作式20mm3連装回転キャノン砲 |
情報源 「トンダール(Tondar)級高速攻撃艇」、「セラジ(Seraj)級高速艇」、「ペイカップ(Peykaap)III級ミサイル艇」、「タレグ(Taregh)級高速艇」、「IRISシャヒード・ナゼリ」。
本研究の探究的な性質を考慮し、青部隊のモデリングでは、艦艇搭載のエフェクターの連携に焦点を当てている。この目的のため、27mm近接防空システム (CIWS)[38]と76mm砲をモデル化した。艦砲のモデル化には、線形および二次の空気抵抗を考慮した弾道モデルを用い、終端弾道モデルと組み合わせた簡略化された確率的損傷モデル(ベイジアン・モデル)を実装した。「ブルーランド」のフリゲート艦の基本バージョンには、左右両側に1基ずつ、計2基の近接防空システム (CIWS)が搭載されている。両システムの搭載と配置により、フリゲート艦の横方向の調整範囲は±100度に制限されている。さらに、フリゲート艦はプラットフォーム前部に76mm砲を搭載している。
現在、近接防空システム (CIWS)は一般的に電気光学センサーとレーザー測距儀を用いて遠隔操作されている。電気光学センサーは最大48倍のズームが可能である。さらに、光学追跡機構により複数のターゲットを同時に追跡できるため、ターゲット切り替え時のセンサー・エフェクター間の遅延が低減される。高速かつ機敏なスウォームに対抗するには、攻撃側のスウォームが攻撃地点を占拠するのを防ぐための最適なターゲット順序付けが必要である。
多くの場合、ターゲットの順序付けは電子戦闘管理システム(CMS)または人間のオペレーターによって行われる。我々は、AIベースのターゲット順序付けにモデルベースの強化学習アプローチを用い、2台以上の近接防空システム (CIWS)を、意思決定プロセスにおいてパートナー近接防空システム (CIWS)の決定を考慮に入れた分散型部分観測マルコフ決定プロセス(decPOMDP)と連携させた[39]。
3.3 AI戦術の訓練
「ブラック・パール」は、GhostPlay内で部分的に開発された防衛メタバース(Defense Metaverse)をコアシミュレーション環境として採用している[40]。防衛メタバース(Defense Metaverse)は、戦場を非常にリアルに再現するだけでなく、カウンター・プレイを用いてAIが「人間が設定した特定のパラメータ内で任務を成功させるのに最適な」戦術を学習できるようにする[41]。
「ブラック・パール」の探索的な性質を考慮し、初期訓練実行には粒子シミュレーションを使用した。直感に反して、初期訓練を高解像度シミュレータで行った場合、強化学習戦略(ポリシー)をシミュレーション環境から現実世界へ移行することは、特にうまく機能しない。多くの場合、いわゆるスプリアス効果(シミュレーション環境の人工物である可能性のある微妙な効果で、システムが意思決定に関連があると判断する効果)が訓練に影響を与えるため、それぞれの戦略は不安定になる。したがって、より有望なアプローチは、ノイズの影響を受けやすい比較的粗い解像度のシミュレータ(粒子シミュレーションなど)で基本的な意思決定プロセスを学習し、高解像度シミュレータを使用してそれぞれのポリシーを微調整することである。
さらに、我々はマルチエージェント・アプローチを用いて、インテリジェントな敵対勢力を含む海戦シナリオをシミュレーションする。これは、単一のエンティティだけでなく、連携が必要なエンティティのグループもモデル化することを意味する。現実的なシミュレーションには、統合の状況認識と理解、そして分散的な連携が不可欠である。分散的な連携とは、個々のエンティティが個別の戦略を実行し、統合任務の達成に協力が有利な場合は他のエンティティと協力できることを意味する。
AIベースのエージェントにとって協力はデフォルトのモードではないため、AIベースのエージェントが協力方法を学習するためのインセンティブを与えるための特別な方法とメカニズムが必要である。マルチエージェント強化学習はさらに要求が厳しく、学習プロセスに具体的な変更を加える必要がある。例えば、独立Q学習では、各AIベースのエージェントは「他のエージェントを環境の一部として扱い、独自のポリシーを独立して学習する」[42]。集中学習と分散実行(Centralized Training with Decentralized Execution: CTDE)を使用するエージェントは、一般的に利用可能な情報を使用して学習するが、局所的な観察のみに基づいて自己学習した戦略を実行する[43]。
「ブラック・パール」シミュレーションに使用されている防衛メタバースは、分散型部分観測マルコフ決定プロセス(decPOMDP)を解くモデルベース強化学習アプローチを用いて、マルチエージェントシステムの協調を協調ゲームとしてモデル化する[44]。このモデルには、いくつかの利点がある。
◎ まず、分散型部分観測マルコフ決定プロセス(decPOMDP)を使用するエージェントは、自身の状態と行動のみに焦点を当てた戦略を策定するだけでなく、仲間のエージェントの起こりうる状況、意図、行動を考慮する必要がある。これにより、協調戦略を自己学習する基盤が築かれる。
◎ 第二に、分散型部分観測マルコフ決定プロセス(decPOMDP)は不確実性と部分的に観測可能な事実を扱う。これにより、エージェントは不完全な情報に基づいて戦略を策定する方法を学習する。これらの戦略は、グラウンド・トゥルース(Ground Truth)※4が欠落している場合、つまり情報が乏しく、遅延によって意思決定が遅れる状況で最も有効である。したがって、これらの戦略は「認識された海洋状況図(RMP)」のギャップを補うことができる。
※4 グラウンド・トゥルース(Ground Truth)とは、モデルまたはアルゴリズムによって行われた予測を検証または比較するためのベンチマークとして使用される、正確で現実世界のデータまたは情報を指す。これは、モデルのアウトプットの測定基準となる、実際に観測された結果を表す。この用語は一般に、機械学習、コンピューター・ビジョン、リモート・センシングなどで、正しいと想定される参照データを表すために使用される。グラウンド・トゥルース(Ground Truth)の意味は、モデルの精度と信頼性を評価し、モデルが意図したとおりに動作することを確認するうえで不可欠である。(参考:https://www.sapien.io/ja/glossary/definition/ground-truth)
◎ 第三に、分散型部分観測マルコフ決定プロセス(decPOMDP)で訓練されたエージェントは、集団行動と個別行動の利点を評価する必要がある。この能力は、スウォーミングのような個別行動が統合任務の成功に大きく影響する場合に極めて重要である。
◎ 最後に、分散型部分観測マルコフ決定プロセス(decPOMDP)体制下での作戦には、AIベースのエージェントが効果的な通信戦略を学習する必要がある。エージェントは、利用可能な帯域幅と情報共有が集団的意思決定に与える影響を考慮しながら、いつ、何を通信するかを学習する必要がある。これは、例えば敵対的な電磁波攻撃下で運用する場合に最も重要である。
4 海戦(Naval Combat)のための緊急のAI戦術
4.1 赤部隊の戦術
海軍アセットや各センサー、エフェクターといったシナリオ要素の実装には、AIベースのポリシーを使用する。これらのポリシーは分散型協調に基づいている。各要素には独自の統制モジュールがあるため、中央集権的な赤部隊統制はない。むしろ、前章で述べたように、各要素は独自の戦略に従う。この基本原則に基づき、各エージェントは訓練ラウンドを通じて特定のポリシーを策定し、訓練実行でシミュレートされた物理的特性と特定のセンサーおよびエフェクターの能力を最適に活用する。その結果、青部隊の行動や対抗手段に応じて、異なる攻撃戦術が生まれる。
このような背景を踏まえ、図2はシナリオの開始時点を示している。3.1章で述べたように、パナマックス(Panamax)タンカー(青の点線)が護衛艦隊を率いて戦域に進入する。赤い点で示される攻撃艇群は北東海域に停泊している。図3に示すように、最初の攻撃艇群(2隻のペイカップ(Peykaap)型高速艇と、より大型の高アスペクト比双胴船(HARTH))が護衛艦隊に接近する。
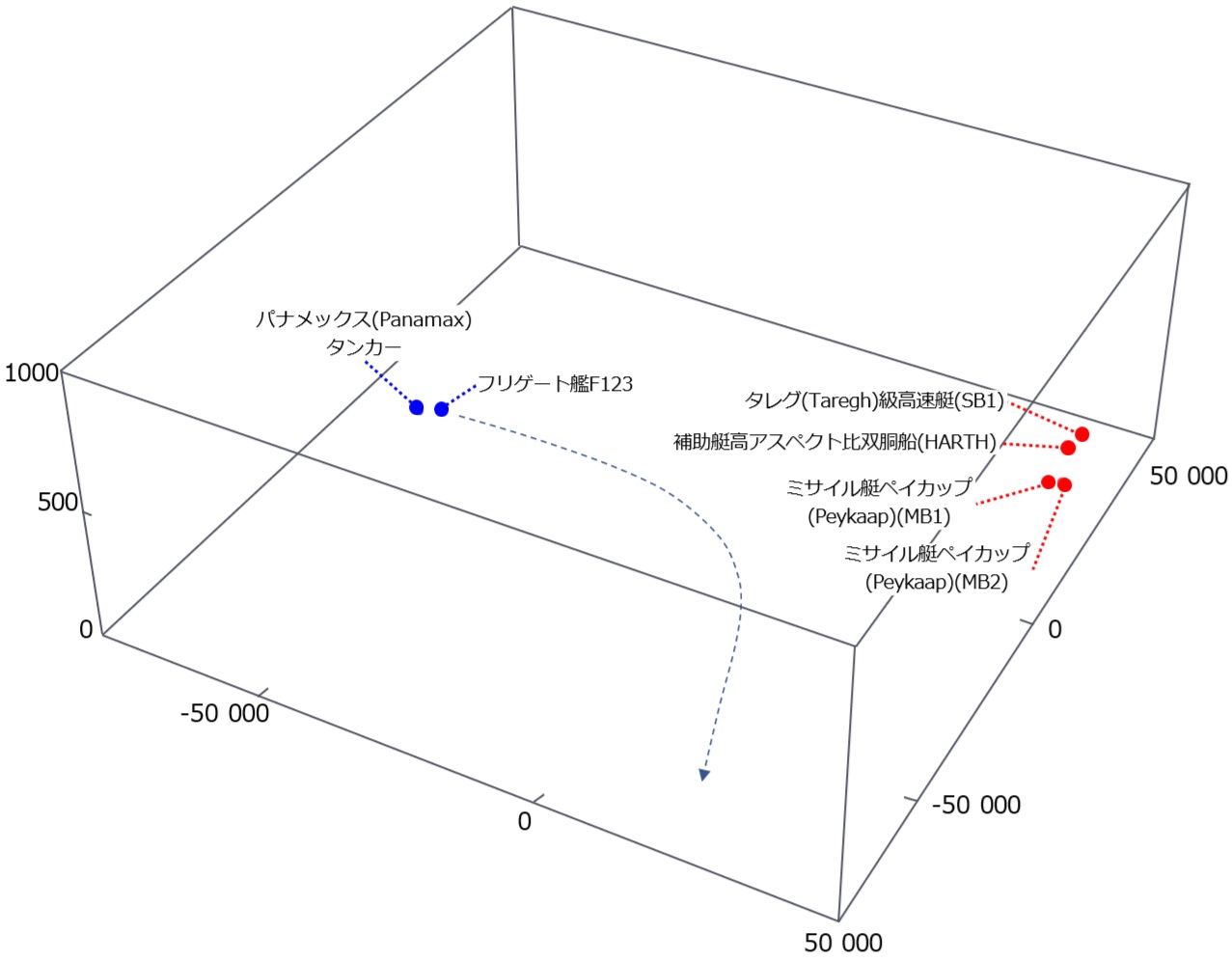
図2: シナリオの出発点 |

図3:船団に接近する最初の攻撃艇 |
赤い矢印は、40~50ノットでタンカーに接近する高速艇の迎撃任務を示している。高速艇は船団を封鎖する。これに対し、フリゲート艦は加速し、周辺海域における敵の行動をより深く把握し、必要に応じて赤部隊の群がタンカーに到達する前に脅威を無力化する。同時に、重火器を搭載した第二の攻撃艇群が船団に向かっている(図4)。

図4:タンカーを阻止しようとする攻撃艇 |
2 番目の攻撃群は、最初の群と船団に対して攻撃ベクトルを調整および同期している。図 4 に示すように、高速艇はタンカーをフリゲート艦から引き離そうとし、追加の高速艇はフリゲート艦を潜伏させて、他の赤部隊のスウォームのメンバーがタンカーを攻撃するための隙間を作ろうとしている。フリゲート艦が 2 番目の攻撃艇に対抗するための初期対応を開始すると、3 番目の赤部隊の高速艇群が船団に向かっている。これらの高速艇の 1 隻はタンカーに乗り込むのに使用され、3 番目の群の別の高速メンバーは船団を攻撃するためのロケット砲を搭載している。図 5 は青色のフリゲート艦の「認識された海洋状況図(RMP)」を示し、攻撃スウォームの攻撃軌道とタイミングを示している。中央の青い点はフリゲート艦の位置を、左側のもう 1 つの青い点はタンカーの位置を示している。
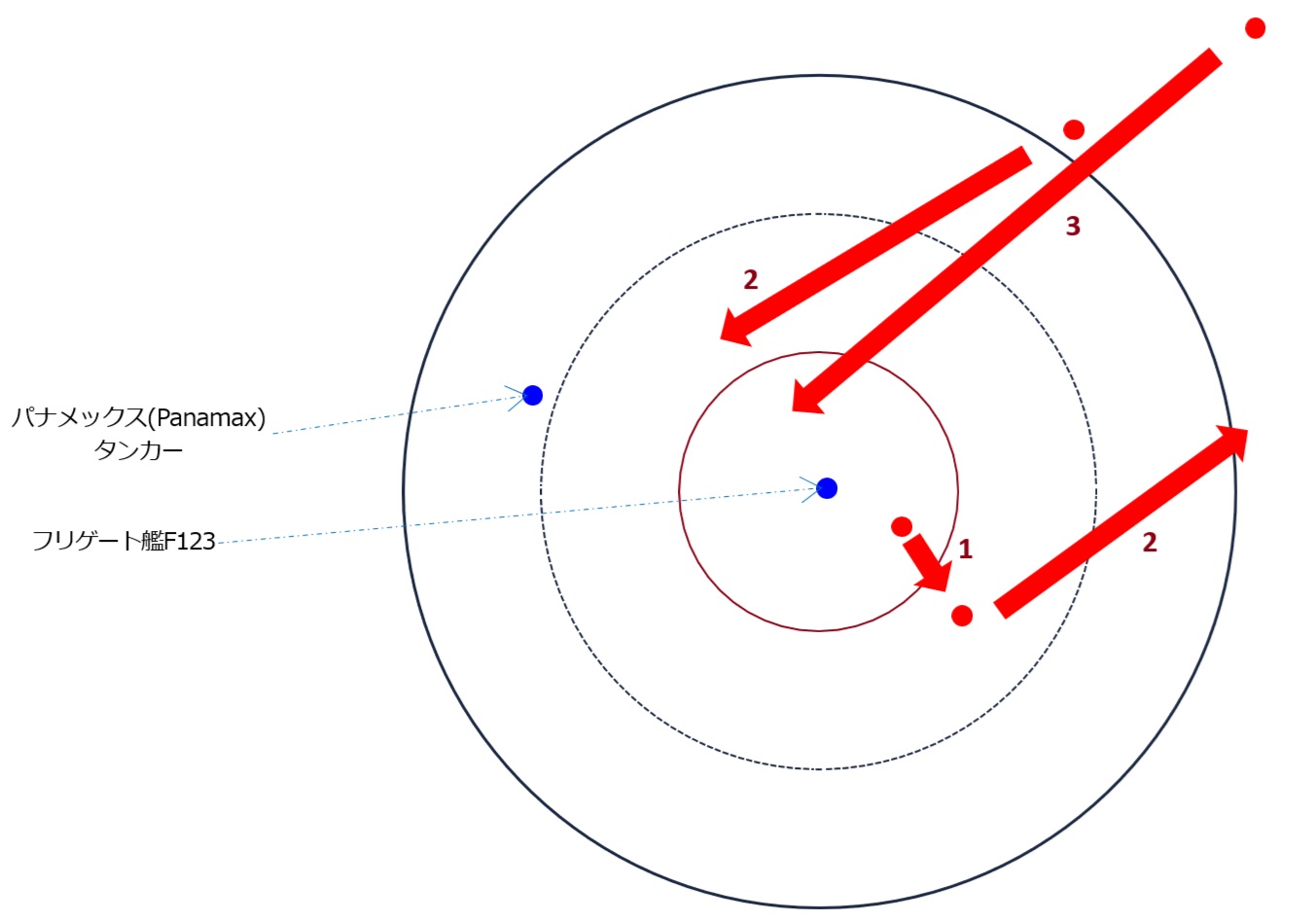
図5:青のフリゲート艦が認識する海洋図 |
シナリオが進むにつれ、現在タンカーを妨害している船舶はフリゲート艦との交戦を回避するために北方に移動している。同時に、高速ミサイル艇も北方で位置を変更し、ミサイルと魚雷でフリゲート艦を脅迫する。これは、フリゲート艦による第2、第3の攻撃群との交戦を抑止し、遅らせることを意図している(図6)。
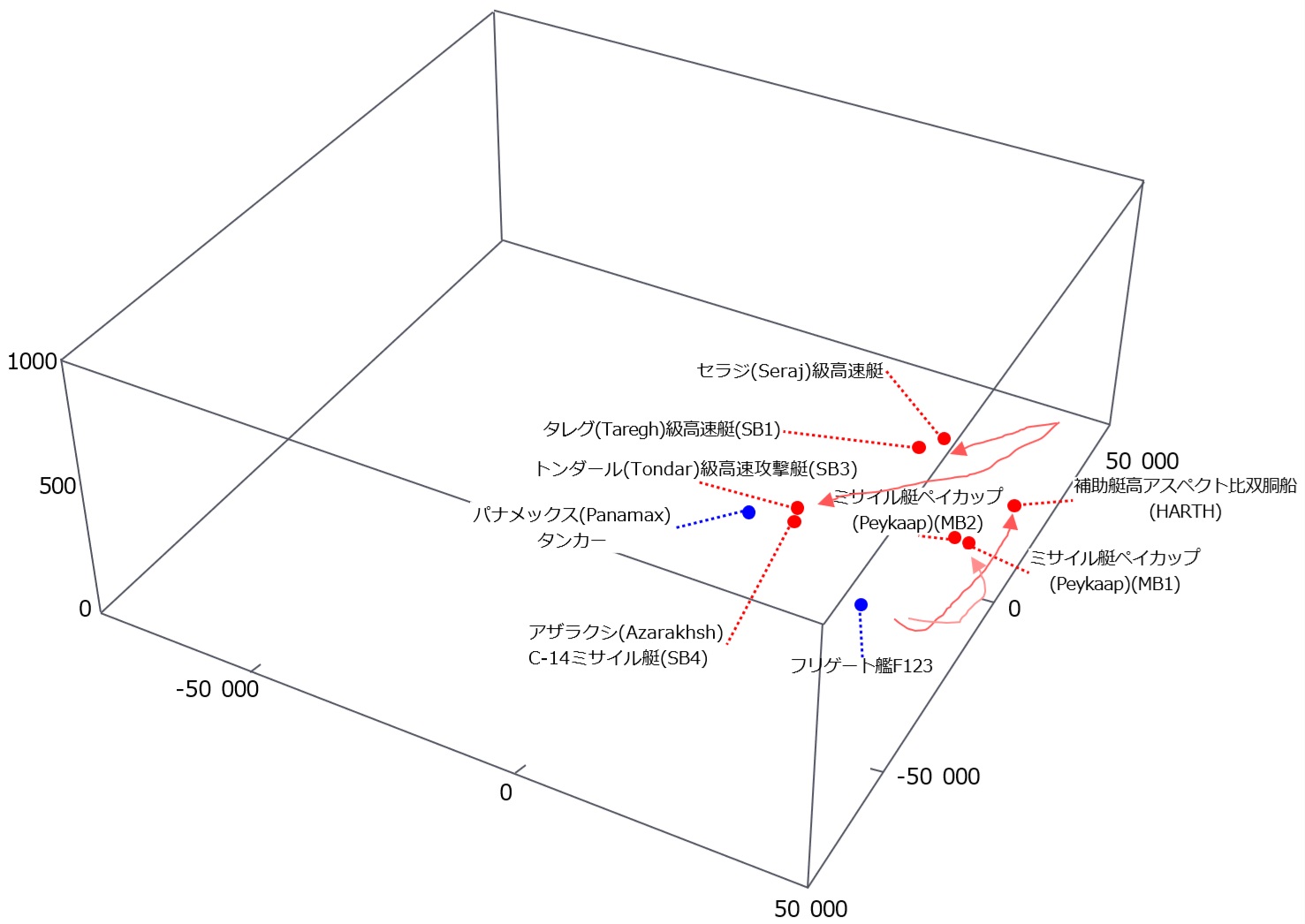
図6:タンカーをブロックして体勢を立て直す攻撃スウォーム |
このシナリオは何を示しているのだろうか。軌道(図 7)は、攻撃側の高速艇が、武装および非武装のプラットフォームを使った複雑な高速艇攻撃を調整し、同期させることができる戦術を開発することを学んでいることを示している。タレグ(Taregh)級の軌道(緑)と セラジ(Seraj)級の軌道(オレンジ)は、これらのスウォームのメンバーが速度を利用してタンカーの前に位置していることを示している。また、タンカーを迂回してタンカーの軌道を横切ることで、タンカーの速度を落として最終的に停止させる。同時に、重火器を装備した トンダール(Tondar) 級ボート(赤)と ペイカップ(Peykaap) 級ボート(紫)は、タンカーと並んで移動したり、タンカーの後ろに位置して、タンカーの機動の自由(freedom of maneuver)を制限する。いくつかのシナリオでは、攻撃側のボートは武器を使用することが許可された。これらの事例では、トンダール(Tondar)級およびセラジ(Seraj)級潜水艇の艦上砲システムは、タンカーを破壊するためではなく、乗組員がタンカーに乗り込むために作動した。同時に、ペイカップ(Peykaap)級潜水艇の軌跡(紫色)は、これらの潜水艇がいつでも魚雷でタンカーを破壊することができたことを示している。
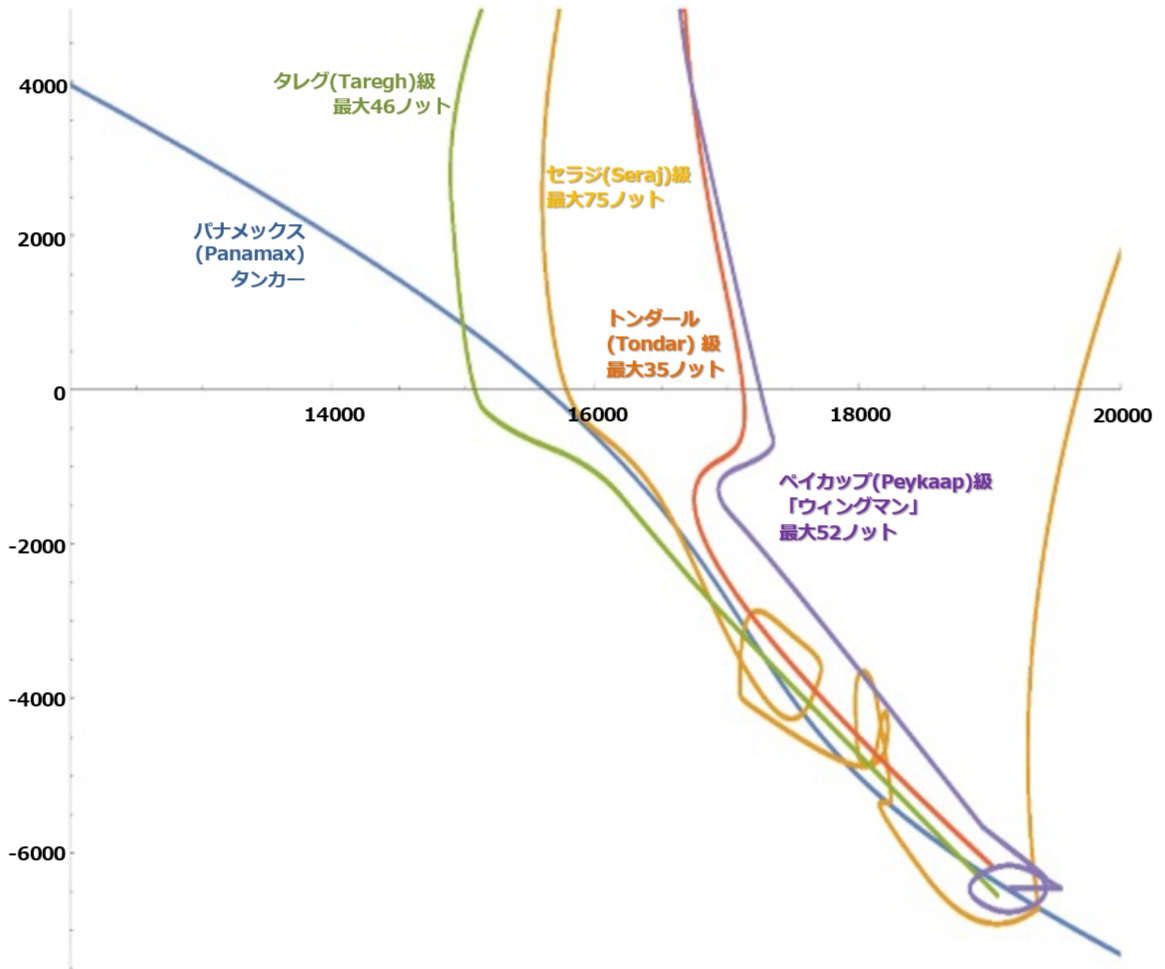
図7:赤の阻止戦術と軌道 |
このような背景のもと、我々の研究結果はまず、上記のスウォーム調整戦術が中央調整なしに出現することを示している。他の場所で説明した原理に基づき[45]、スウォームの各メンバーは仲間を環境の一部として認識し、非同期的に調整情報を交換することができる。
第二に、各エージェントはプラットフォームの特性を最大限に活用する方針を策定している。例えば、高速艇は、個別および集団的にテンポと加速を活用して迅速に位置を変更し、タンカーを包囲し、タンカーの軌道を横切り、フリゲート艦との交戦を回避し、タンカーとフリゲート艦に対して最適な兵装配置を行う。さらに、セラジ(Seraj)級潜水艇は速度を利用して搭載ロケット砲の射程範囲を拡大し、フリゲート艦に対する緩衝地帯を形成する。
第三に、赤部隊のタイミングは徐々に成熟しつつある。赤部隊のスウォームは、青部隊の行動に応じてタイミングを適応させることを学習しているのが観察されている[46]。スウォームの個々の行動間の時間的順序が拡大し、これによりスウォームのメンバーは高速で位置を変更することが可能になった。我々の評価によると、この戦術はスウォームが青部隊の協調的な武器交戦をより効果的に回避することを目的としており、結果として青部隊の対抗手段の有効性を低下させる。
4.2 青部隊の戦術
我々の探索的分析の範囲を踏まえ、青部隊の戦術は、フリゲート艦の航行軌道と、フリゲート艦に搭載された2基の近接防空システム (CIWS)および76mm艦砲の連携を確保することに重点を置いた。両近接防空システム (CIWS)は海抜約6メートルの右舷および後舷で運用され、各システムは艦の1つのエリアのみをカバーする。海抜の高い位置に武器を配置することで、攻撃者が武器の防御境界を突破または突破してフリゲート艦の船体に到達する余地が生じる。したがって、AI搭載プラットフォームは、攻撃者を有効射程内に留めつつ、高速艇による脅威に対処できるよう、フリゲート艦の航行経路と武器システムの活動を調整する必要がある。
我々は主に赤部隊と青部隊のプラットフォームの挙動に着目していたため、シミュレーションでは赤部隊と青部隊の完全な知覚(グラウンドトゥルース)を仮定した。弾道は2次弾道モデルを用いて明示的に計算した。これは、武器の旋回と安定化の機械的遅延、砲のリズム、装填、クールダウンといった要素を協調政策に考慮するためである。風などの環境条件下での実際の命中率とターゲットへの潜在的ダメージは、確率的グラフィカル・モデルを用いて推定した[47]。
このような背景から、例えば、戦術的ターゲット・シーケンシングの改善は、青部隊の任務の成功率を大幅に向上させることができると指摘する。現在、既存の近接防空システム (CIWS)は、センサーの観測角度内にある複数のターゲットを追跡、分類、識別している。シーケンシングは通常、電子戦闘管理システム(CMS)ヒューリスティックに基づいて行われる。しかし、これは遅延を引き起こし、各兵器の状態に関する実際の情報を十分に活用できないことがよくある。しかし、AIによって最適化されたシーケンシングは、異種攻撃スウォームに関する我々の研究結果が示すように、近接防空システム (CIWS)の有効性と効率性をさらに向上させることができる。
この場合、ターゲットの順序付けでは、スウォームの軌道と、各オブジェクトがタンカーとフリゲート艦の船団にもたらす特定の脅威が考慮される。訓練中、ポリシーは、以前の訓練実行での高速艇との過去の遭遇を考慮して、将来状況がどのように展開するかというコンセプトも構築する。青のポリシーは、攻撃を先取りして妨害し、非常に早い段階で攻撃を効果的に無力化できるようである。そのため、図8に示すように、近接防空システム (CIWS)は、ロケット砲を搭載したセラジ(Seraj)級高速艇を、武器の射程が限られているタレグ(Taregh)級ボート(オレンジ色の矢印)に対処する前に対抗する必要がある最大の脅威(青い矢印)と特定した。これらのプラットフォームと交戦した後、3回目の交戦ラウンドは残りのタレグ(Taregh)級ボート(緑の矢印)に焦点を合わせる。

図8:異種攻撃スウォームに対する近接防空システム (CIWS)シーケンス戦術 |
攻撃スウォームに対する武器の協調使用と並行して、シーケンシングも考慮する必要がある。あるシナリオでは、フリゲート艦がスウォームに非常に早い段階で交戦した様子を目撃した。前章で論じたシナリオとは対照的に、フリゲート艦はタンカーを妨害していた高速艇には対処せず、即座にペイカップ(Peykaap)艇とその支援艦艇に協調射撃を開始した(図9)。その結果、2隻目のペイカップ(Peykaap)艇は掩蔽物を失い、速やかに戦域から離脱して再編成を行った。青色近接防空システム (CIWS)の早期使用はエスカレーションを示唆するものではあるが、この行動はタンカーがフリゲート艦から分離されるのを防ぐことに繋がった。
図9:序盤のペイカップ(Peykaap)ボート攻撃 |
最初の高速艇群の脅威が中和されたため、フリゲート艦は方向転換して、タンカーを攻撃している残りのボートに向かうことができる。これにより、攻撃側のスウォームに圧力がかかる。各高速艇のセンサーが視線内に設置されているため、フリゲート艦への直接攻撃は困難になっている。攻撃の射程内に入ると、フリゲート艦はタンカーの前で機動している高速艇と交戦する。さらに、フリゲート艦はタンカーの周りを移動し、最初に魚雷と対艦ミサイルを搭載したトンダール(Tondar)級ボートと交戦する。次に、フリゲート艦はタレグ(Taregh)級ボーディング・ボートと交戦する。この段階では、セラジ(Seraj)級ボートはタンカーに近すぎて 107 mm ロケット砲を効果的に使用できず、タンカーに乗り込むための乗組員も不足しているため、タンカーにとってもはや脅威にはならない (図 10)。しかし、フリゲート艦の射程外に留まっていたペイカップ(Peykaap)級潜水艦が、セラジ(Seraj)級潜水艦の支援のために船団に接近してきた。これに対し、フリゲート艦は両近接防空システム (CIWS)を効果的に同時かつ協調的に使用できる位置に移動し、セラジ(Seraj)級潜水艦とペイカップ(Peykaap)級潜水艦を同時に攻撃することに成功した。

図10:フリゲート艦による攻撃スウォームの連続交戦 |
我々は、早期エスカレーションこそが青部隊が任務を成功させるための選択肢の一つであると認識している。これは注目に値する。なぜなら、我々の評価によれば、赤部隊の攻撃スウォームはスピード、機敏性、射程距離を活かして優位に立っているため、より反応的で防御的な姿勢をとると青部隊の任務の成功率が大幅に低下するからである。全体として、赤部隊の攻撃スウォームは、(a)タンカーをフリゲート艦から引き離し、(b)タンカーやフリゲート艦が高速艇のすべての兵器の射程圏内にある状況にフリゲート艦を対峙させることにスウォームが成功した場合、フリゲート艦の防御を効果的に無力化する。この場合、セラジ(Seraj)級ボートは通常、107mmロケット弾を使用して高速で船団に対処し、扇状に散弾を散布してフリゲート艦のセンサーとエフェクターを最大限に反撃させる(図11)。これによりフリゲート艦は圧倒される可能性が高く、トンダール(Tondar)級やペイカップ(Peykaap)級の潜水艦が魚雷や対艦ミサイルで攻撃するのに有利な状況が生まれる。

図11:107ミリ砲弾を使用したセラジ(Seraj)級ボートの典型的な攻撃パターン |
4.3 研究結果の解釈
10 万件のシナリオに基づく赤部隊と青部隊の AI 戦術に関する主要な研究結果をまとめてみる。2 つの異なるオプションを示す。赤部隊 (自由) は、青部隊のフリゲート艦が破壊されたか、赤部隊の部隊が青部隊のタンカーに乗り込んだか[48]、または乗り込みが阻止された場合はタンカーが破壊されたことを意味する。全体的な乗り込みは 3 倍の係数で重み付けされた。赤部隊 (制限付き) は、赤部隊がタンカーを破壊できないことを意味する。特に、赤部隊の部隊はタンカーに対してスタンドオフ兵器を使用できない。これは、青部隊が再編成して赤部隊のスウォームを押し戻すのに十分な時間があることを示唆している。また、戦術がパフォーマンスと有効性に与える影響を測定するために、2 基と 4 基の 近接防空システム (CIWS) の調整戦術を比較する。
表3:100kシナリオに基づく統計的成功率
|
成功したシナリオの数 |
||||
|
赤部隊 (自由) |
赤部隊 (制約) |
|||
| CIWSの調整 | CIWS 2基 | CIWS 4基 | CIWS 2基 | CIWS 4基 |
| 伝統的 |
34% |
38% |
41% |
42% |
| 緊急 |
39% |
52% |
56% |
72% |
表3はその結果をまとめたもので、次のように解釈できる。
76mm艦砲の不使用
システムは、76mm艦砲の使用は攻撃スウォームへの対抗には効果的ではないことをすぐに学習する。初期の訓練サイクルでは、システムは密集編隊を組んで行動する、あるいは通路内で活動する攻撃スウォームと戦うためにこの砲を使用した。システムの方針が成熟するにつれて、76mm艦砲は使用されなくなった。
緊急調整
緊急協調(図12)は、2基の近接防空システム (CIWS)を使用した場合でも付加価値を提供するが、その性能向上は従来の近接防空システム (CIWS)協調メカニズムと比較して決定的なものではない。これは主に、各システムが後方または右舷側の責任範囲しかカバーできないため、両方のシステムが赤部隊の攻撃スウォームを十字砲火に巻き込むことができないという事実に起因している。4基の近接防空システム (CIWS)を使用した緊急協調は、4つのシステムによってより多くの協力の選択肢が提供され、それが制御アルゴリズムに反映されるため、防御側の任務を向上させる。

図12:フリゲート艦による攻撃スウォームへの本格的な交戦 出典:21StrategiesとATLAS ELEKTRONIKによるプロジェクト「ブラック・パール」 |
赤部隊(自由)の低い成功率
速度と機敏性により、赤部隊は青部隊に効果的な対抗手段を提供することなく、広範囲をカバーすることが可能になる。これは、防御側システムの効果が限定的であるためである。我々がモデル化したシナリオの最悪のケースでは、単一の水上プラットフォームが高価値アセットを防御できるのは、10ケース中わずか3.9ケース(近接防空システム (CIWS) 2基)または5.2ケース(近接防空システム (CIWS) 4基)である。防御側はタンカーと攻撃スウォームの間に隙間が生じないようにしつつ、攻撃側に対して再配置する時間を必要とするため、成功率はむしろ低い。したがって、例えば海上発射効果などの代替解決策を用いて隙間をカバーできる可能性がある[49]。
5 展望
GhostPlay@SEAによる海軍AI戦術開発の推進
GhostPlayとGhostPlay@SEAは、既存の戦術的行動を評価し、新たな戦術的行動を可能にするAI戦術を開発する能力・技術開発プロジェクトである。これらのプロジェクトは、現状打破を目指している。画像認識、信号分析、テキスト変換などの改善に用いられる分類や回帰分析といった従来のAIアプローチとは対照的に、戦術的意思決定は特定の時点における単一の意思決定を最適化するだけではない。むしろ、戦術的意思決定は、一連の依存関係や敵対的な反応を考慮する。特定の時点で必要かつ論理的に思えるものでも、長期的には任務の成功を危うくする可能性がある(近視眼的な意思決定)。さらに、適切なタイミングで意思決定が行われないと、将来の意思決定の余地が制限される可能性がある。
このような背景から、我々はAIが高速艇のスウォームのための重要かつ効果的な赤部隊の攻撃戦術と、近接防空システム(CIWS)の使用を改善するための青部隊の防御戦術を自己学習できることを実証した。どちらの場合も、分散型意思決定アプローチがコラボレーションを可能にする意思決定ポリシーにつながることを実証した。これらのポリシーを使用するエージェントは、対等なエージェントとの調整によって、個々のエージェントだけでは解決できないタスクを解決できるかどうか、またいつ解決できるかを学習する。これは、効果的な新しい攻撃戦術につながる。青部隊の比較分析は、特に軍事調整の課題がより複雑になった場合、協調戦術がパフォーマンスと堅牢性に優れていることを示している。我々が取り組んでいる未解決の課題は、実証されたアプローチを大幅に多数の調整されたオブジェクトに拡張する必要性から生じている。
現状のシナリオは探索的な性質を持つため、今回の研究結果は暫定的なものではあるものの、そこから得られるメッセージは明確である。AIを活用した協調的調整戦術は、軍隊が軍事力向上のために活用できる、ソフトウェアを活用した新たな価値レイヤーを構成するものである。防衛デジタル化を推進するためにサービス指向アーキテクチャを採用している軍隊は、これらの戦術を、モノリシックなレガシー・システムを置き換えるために活用できるマイクロサービスとして理解し、モジュール性、弾力性、そして拡張性を向上させるだろう。
この論理はGhostPlay@SEAの基盤となっている。2021年から2024年にかけて開発されたAI戦術と防衛メタバースに基づき、今後2年間をかけて、現在の技術と戦術スタックを海軍ドメインへ移行する。モザイク戦(Mosaic Warfare)やプロテアン部隊(Protean force)といったコンセプト的アイデアに基づき、海軍AI戦術を用いて部隊配分を向上させる。この部隊配分には、人間のオペレーターによる調整、あるいは高度な機械同士の連携が不可欠である。
GhostPlay@SEAは、この後者の視点に立って、クロス・ドメイン・スウォーム戦術による致死性の向上と、クロス・ドメイン対スウォーム戦術による防御力の向上を目指す。この目的のため、運用実験(OPEX)とシミュレーション実験(SIMEX)を斬新な方法で組み合わせる。まず、防衛メタバースを用いてAI戦術のポートフォリオを開発し、シミュレーション実験(SIMEX)で実証する。次に、これらの戦術をデジタル環境から物理的な無人アセットに移植し、GhostPlay@SEA運用実験(OPEX)でデジタル開発された戦術を実機テストすることを目指す[50]。同時に、防衛メタバースを用いて、ますます複雑で要求の厳しいシナリオを実行し、2回目のシミュレーション実験(SIMEX)に向けてAI戦術を微調整していく。我々はこのアプローチによって、ソフトウェア定義の防御(さまざまな技術構成要素の戦術的付加価値の評価とデジタルおよび現実の実験を組み合わせたコンセプトと機能開発を使用)が、戦力開発に具体的な成果を生み出すことを実証するつもりである。
著者について
ハイコ・ボルヒャート(Heiko Borchert)博士はDAIOの共同ディレクターであり、戦略問題コンサルティング・ブティックを経営している。国防輸出、国防研究、多国間軍備協力、海洋安全保障など幅広いテーマで活躍。ザンクトガレン大学で国際関係学、経営学、経済学、法学を学び、博士号を取得。
クリスチャン・ブランドルフーバー(Christian Brandlhuber)博士は21strategiesの共同設立者兼CTO。ミュンヘン工科大学およびカールスルーエ工科大学で数学とコンピューター・サイエンスを学ぶ。1990年代後半から防衛、産業、金融市場向けのAIソリューション開発に携わる。特にデータ・フュージョンの分野で5件の特許を共同保有し、高度なファイナンシャル・プランニング・システムに関する特許も取得している。
ジェロニモ・ザーク(Jeronimo Dzaack)博士はブレーメンにある ATLAS ELEKTRONIK のポートフォリオ、テクノロジー、イノベーションの責任者である。2011年にATLAS ELEKTRONIKに入社する以前は、ベルリン工科大学(TU Berlin)の動的システムにおけるユーザー行動のモデリングに関するワーキング・グループの一員だった。Dzaack 博士は、ベルリン工科大学で人と機械のコラボレーションに関する博士号を取得し、博士研究員として勤務した後、ブレーメン大学で情報学を学んだ。
ノート
[1] https://www.youtube.com/watch?v=WjUPIZhqhDs (last accessed 11 May 2025).
[2] ボルヒャート/ブランドルフーバー/ブランドシュテッター/シャール『戦場のフリー・ジャズ』、ボルヒャート/ブランドルフーバー『目に見えないものは手では打てない』。
[3] この点において、我々の論文は、新たな技術が攻撃と防御のバランスを傾けるかどうかについての進行中の議論にも貢献している。
[4] しかし、我々の研究結果は、例えば高価値プラットフォームを防衛するための船団護衛任務においては、これだけでは不十分であることを示唆している。これらの任務を確実に防護するには、例えば海上発射型エフェクターなどの追加的なインテリジェントなスタンドオフ兵器が必要になる。
[5] Quoted in: Fabey, “Lessons learnt. US Naval operations in the Red Sea,” p. 28.
[6] Fabey, “Lessons learnt. US Naval operations in the Red Sea,” p. 27.
[7] For more on this concept, see: Hughes, “Giving our ‘paper tiger’ real teeth.”
[8] Das Zielbild für die Marine ab 2035, pp. 2-3, 6.
[9] Borchert, “Maritime Sicherheit in Gefahr,” pp. 54-65.
[10] Future Character of Conflict, pp. 21-25.
[11] Parker, “The Black Sea battle.” To what extent unmanned systems used in Ukraine would be fit for mission against, for example, the People’s Liberation Army Navy (PLAN) is questionable. See: Tallis, “The calm before the swarm.”
[12] Sutton, “9 Lessons from Iranian and Houthi Attacks on Ships in the Red Sea.”
[13] Ziezulewicz, “What Red Sea battles have taught the Navy about a future China fight.”
[14] Sutton, “9 Lessons from Iranian and Houthi attacks on ships in the red sea;” Kushal, “Lessons for the Royal Navy’s future operations from the Black and Red Sea.”
[15] Karako/Pyle, “Operations in the Red Sea: Lessons for Surface Warfare,” p. 7; Dunley, “The end of the age of transoceanic navies?,” p. 61.
[16] Fabey, “Lessons learnt: US Naval operations in the Red Sea,” p. 28.
[17] Kaushal, “Lessons from the Black and Red Sea on the use and design of future fleets,”. Expeditionary reload at sea is a most challenging undertaking, but can be done. See Fabey, “Lessons learnt: US Naval operations in the Red Sea,” p. 25-27.
[18] Tallis, “The calm before the swarm.”
[19] Kaushal, “Lessons for the Royal Navy’s Future Operations from the Black and Red Sea;” Fabey, “Lessons learnt: US Naval operations in the Red Sea,” p. 25, 29.
[20] Kaushal, “Lessons from the Black and Red Sea on the use and design of future fleets.”
[21] Fabey, “Lessons learnt: US Naval operations in the Red Sea,” pp. 25, 29.
[22] Ibid., p. 24.
[23] Pomerleau, “CNO Franchetti: ‘We’re continuing to learn’ countering drones, missiles in the Red Sea.”
[24] Pomerleau, “CNO Franchetti: ‘We’re continuing to learn’ countering drones, missiles in the Red Sea;” Karako/Pyle, “Operations in the Red Sea,” p. 9.
[25] For more on John Boyd, his concept, and its reception, see: Hammond, The Mind of War; Robinson; The Blind Strategist.
[26] Gryson, “Mosaic Warfare,” p. 11.
[27] Clark/Patt/Schramm, Mosaic Warfare, p. V.
[28] Gryson, “Mosaic Warfare,” p. 11.
[29] Borchert/Brandlhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, pp. 16-17.
[30] In Greek mythology, Proteus, “the first-born of Poseidon (…) changed shape as soon as he was seen.” Katzenstein/Seybert, “Preface,” p. xi.
[31] Borchert, “The Very Long Game of Defense AI Adoption,” p. 7.
[32] Maritime Operating Concept, pp. 19, 10.
[33] Allen/Husain, “On Hyperwar.”
[34] Dougherty, “Moving Beyond A2/AD.”
[35] Borchert/Brandlhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, p. 13.
[36] Borchert/Brandlhuber, His Hands Can’t Hit What Hit Eyes Can’t See, pp. 28-30.
[37] このようなドメイン移転は困難を極める。掩蔽物や隠蔽物の不足、そして物的要因の影響が大きいため、海戦はより迅速かつ決着がつく傾向があるからである。詳しくは、ビドル/セヴェリーニ「軍事効果と海軍戦」を参照。
[38] 本稿で用いたシナリオでは、近接防空システム(CIWS)の口径は27mm×145口径、発射速度は毎分1,700発(速度1,100m/秒)。システムの仰角は-15度から+60度、方位角は±170度、最大角加速度は毎秒約85度である。
[39] Brandlhuber, “Superiority on the Battlefield with Tactical AI and Emergence.”
[40] Borchert/Brandlhuber, His Hands Can’t Hit What His Eyes Can’t See, pp. 12-14.
[41] Ibid, p. 12.
[42] Foerster, “Stabilizing experience replay for deep multi-agent reinforcement learning,” p. 1.
[43] Amato, “An introduction to centralized learning for decentralized execution in cooperative multi-agent reinforcement learning.”
[44] Borchert/Brandhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, pp. 13, 17.
[45] Borchert/Brandlhuber/Brandstetter/Schaal, Free Jazz on the Battlefield, pp. 16-17.
[46] この振舞いは、地上の防空システムを攻撃する空中攻撃機のスウォームで観察された行動と類似している。参照:ボルヒャート/ブランドルフーバー『目に見えないものは手では打てない』p. 27。
[47] プロジェクトのこの段階では、機密扱いの性能データと測定データを使用していないことに留意することが重要である。そのため、環境モデルと損傷モデルは、一見妥当と思われるが実際のサンプル・データに基づいていない命中確率と損傷確率を用いてパラメータ化した。これは、現実世界の命中確率と損傷確率が、シミュレーション結果と異なる可能性があることを示唆している。しかし、使用したモデルは簡単に置き換えることができ、訓練を再実行して、実際のデータに基づいて結果を再評価することができる。
[48] 乗船作業は10分以上続き、乗船艇はタンカーの横で活動した。
[49] 今日、ヘリコプターはそれぞれの任務を遂行するために使用されている。 しかし、フリゲート艦とタンカーという組み合わせに対し、マン・ポータブル・エア・ディフェンス・システム(MANPADS)を使用する大規模な攻撃スウォームに対抗するには、インテリジェントな海上発射効果がより効果的かもしれない。
[50] 現在、信頼性の高いドメイン移転は大きな課題となっており、最先端の研究の対象となっている。例えば、国防高等研究計画局(DARPA)は、2023年9月に「不正確で抽象的なモデルから自律技術への移転」(TIAMAT)に関するプロジェクトを開始した。詳細については、https://www.darpa.mil/research/programs/transfer-from-imprecise(最終アクセス日:2025年5月11日)を参照。
