会戦ネットワークと将来の部隊 第1部
先に投稿した米国防総省における統合作戦コンセプト開発の改善では、新アメリカ安全保障センター(Center for a New American Security:CNAS)の論客による「統合コンセプト(joint concept)開発プロセスを改善するための課題と提言事項」について紹介したところである。米軍は、上記の作戦コンセプトの策定と並行して、新たな作戦環境における統合レベルの指揮・統制システムを構想し構築の途上と理解している。この新しい統合レベルの指揮・統制システムに関しては、昨年の9月に米国の新しい戦い方「JADC2」について、昨年の11月に統合全ドメイン指揮統制(JADC2)として紹介してきたところである。
米国防長官のロイド・オースチン(Lloyd Austin)が今年の6月にJADC2 strategyについて承認したとのニュースが流れているが、これもまた、米軍の新たな作戦コンセプトと同様にその実態はわからない。Joint All-Domain Command and Control(JADC2)について、戦略国際問題研究所(Center for Strategic and International Studies)が、JADC2についての課題と提言事項を述べている戦略国際問題研究所報告(CSIS Briefs)「Battle Networks and the Future Force」を公開しているので紹介する。この文書は2部構成であり、先ず、2021年8月5日付のBattle Networks and the Future Force; Part 1: A Framework for Debateから紹介するものである。第1部は、会戦ネットワーク(battle networks)に焦点を当て、会戦ネットワーク(battle networks)を構成する要素を明らかにしている。作戦環境が複雑化する中において、課題の整理を行うときに有効な示唆を与えてくれるものと考える。(軍治)
![]()
会戦ネットワークと将来の部隊 第1部:議論の枠組み
Battle Networks and the Future Force Part 1: A Framework for Debate
August 5, 2021
CSIS Briefs
論点:The Issue
本稿は、米軍(U.S. military)における会戦ネットワーク(battle networks)の将来性(統合全ドメイン指揮・統制(Joint All-Domain Command and Control:JADC2)として知られるようになったもの)を探る2部構成のシリーズの第1弾として、現代の軍事作戦(military operations)における会戦ネットワーク(battle networks)の重要性を検証し、会戦ネットワーク(battle networks)を構成する5つの機能的要素(functional elements)の枠組みを提示する。この枠組みは、既存のシステムや提案されている新しい能力を、統合全ドメイン指揮・統制(JADC2)にどのように貢献するかという観点からコンセプト化し、比較するための共通の基盤となる。シリーズ2回目の報告書では、将来の部隊(future force)のために会戦ネットワーク(battle networks)をデザインする際に、米国防総省(DoD)が考慮しなければならない要素を、作戦上の制約、戦略や政策上の問題、代替的な取得アプローチ(acquisition approaches)などを含めて検討している。
課題を定義する:Defining the Challenge
軍隊(militaries)は会戦ネットワーク(battle networks)を使って、戦場で起こっていることを検知し、そのデータを実用的な情報に加工し、行動方針(course of action)を決定し、その決心(decisions)を部隊間で伝達し、その決心(decisions)に基づいて行動し、実行した行動の効果を評価する。会戦ネットワーク(battle networks)は、「センサーからシューターへのキル・チェーン(sensor-to-shooter kill chain)」(あるいは「キル・チェーン(kill chain)」)と呼ばれることもあり、現代戦(modern warfare)においてますます重要な要素であることが広く認識されている。
近年、会戦ネットワーク(battle networks)の重要性が注目されているが、会戦ネットワーク(battle networks)自体は新しいものではない。初期の会戦ネットワーク(battle networks)では、偵察機、運び屋、旗、電信機、有線の野戦電話などを使って、戦場の部隊間で情報や決心(decisions)を伝達していた。第二次世界大戦では、レーダー、ソナー、無線通信、航空偵察などの技術が広く普及し、より高度な会戦ネットワーク(battle networks)が誕生した。会戦ネットワーク(battle networks)が高速化、長距離化し、そして、軍隊(militaries)にとって有利になる(advantageous)になるにつれ、ネットワーク自体も魅力的なターゲットとなった。ジョン・スティリオン(John Stillion)やブライアン・クラーク(Bryan Clark)が指摘しているように、会戦ネットワーク(battle networks)間の競争は、第二次世界大戦において、特に潜水艦戦(submarine warfare)や対潜水艦戦(anti-submarine warfare)において重要な要素であった。
ここ数十年で変化したのは、センサーから得られる情報量、通信の速さと偏在性、そしてそれらの情報を処理し、敵対者よりも早く意思決定(making decisions)を行うことで得られる戦術的優位性(tactical advantage)の大きさであり、これを「情報化された」戦い(“informationized” warfare)と呼ぶ人もいる。この「新しい戦争のやり方」では、より遠く、より明確に見ることができ、より速く、より広い範囲で行動することができるものが有利となり、相手の同じことをする能力を奪うことができるのである。
すなわち、より軽く、より安く、より忠実なセンサー、セルラー通信、ファイバー通信、衛星通信ネットワークによるデータスループット容量と覆域(coverage)の向上、巨大なクラウド・コンピューティングとデータ・ストレージ・センター、ビッグ・データ分析、機械学習(ML)、人工知能(AI)システムなどである。これらの商用技術(commercial technologies)を軍事用会戦ネットワーク(battle networks)に応用することは、30年以上前から広く認識されており、その全体または一部は、長年にわたってさまざまなコンセプト、イニシアティブ、戦略、バズワードとして現れてきた。このような長い考え方には、1980年代から90年代にかけての「軍事分野における革命(Revolution in Military Affairs)」やソ連が「長距離の複合した偵察・打撃(Long-Range Reconnaissance-Strike Complex)」と呼んだもの、1990年代から2000年代にかけての「変革イニシアティブ(Transformation Initiative)」、「ネットワーク中心の戦い(Network-Centric Warfare)」、「グローバル情報グリッド(Global Information Grid)」、そして2010年代の「第3次オフセット戦略(Third Offset Strategy)」などがある(例を挙げればきりがない)。
米軍(U.S. military)の会戦ネットワーク(battle networks)を近代化して、スピード、復元力(resilience)、相互運用性を向上させる必要性について、多くの考え方や戦略がなされているにもかかわらず、その進展は遅々としている。クリス・ブローゼ(Chris Brose)が著書『Kill Chain』で述べているように、「彼ら(米軍(U.S. military))は、キル・チェーン(kill chain)をこれまで以上に早く閉じることができる新しい会戦ネットワーク(battle networks)を購入するという観点から考えるのではなく、何十年も頼りにしてきた同じプラットフォーム(戦車、有人短距離航空機、大型衛星、大型艦船)の改良版を少しずつ購入するという観点から考えていた」のである。ブローゼが述べているように、既存のプラットフォームと次世代のプラットフォームをより効果的に連携させるために必要なセンサー、ペイロード、通信システムではなく、次世代のプラットフォームを購入することに重点を置いていることは、軍の文化的な限界を示している。例えば、米空軍の2機の第5世代戦闘機(F-22とF-35)がお互いに直接通信できないなど、現在の軍隊に存在する多くの相互運用性の制限の根本的な原因となっている。
相互運用性の問題に対処するため、米国防総省(DoD)はU-2に通信ペイロードを搭載し、F-22とF-35を相互に接続したり、地上の部隊と接続したりするなどの回避策をとっている。同様に、戦場空中通信ノード(Battlefield Airborne Communication Node:BACN)は、RQ-4やE-11などのプラットフォームに搭載され、リンク16(Link 16)や状況認識データ・リンク(Situational Awareness Data Link:SADL)などの様々な戦術データ・リンクを使用して航空機と地上のユーザーを接続する通信ゲートウェイとして飛行することが出来る。このような回避策は必要な第一歩ではあるが、軍の各軍種、各ドメイン、同盟軍部隊やパートナー国の部隊の間で、ダイナミックで復元性のある相互運用性(resilient interoperability)を可能にするメッシュ・ネットワークのビジョンを完全に達成するには不十分である。
現在の取組み:Current Efforts
米軍は今、将来の会戦ネットワーク(battle networks)を構築するための重要なポイントを迎えている。2021年5月13日、ロイド・オースティン(Lloyd Austin)米国防長官は、米軍の統合全ドメイン指揮・統制(JADC2)導入戦略に正式に署名した。しかし、統合全ドメイン指揮・統制(JADC2)のコンセプトの中には、複数の重複した、時には矛盾した取組みがある。米空軍は先進戦闘管理システム(Advanced Battle Management System:ABMS)を推進しているが、これは老朽化したE-8C統合監視ターゲット攻撃レーダー・システム(E-8C Joint Surveillance Target Attack Radar System:JSTARS)航空機の代替として始まったもので、「安全な軍事用デジタル・ネットワーク環境(secure, military digital network environment)」を開発するプログラムに変化したが、このプログラムは会戦ネットワーク(battle networks)のどの要素を構築するのかという点で、いまだに定義されていない。
ここ数年、米海軍は、F-35、イージス艦、SM-6対空ミサイルなど、より多くのプラットフォーム、センサー、兵器を一体化するために、“海軍一体型火力統制-対空(Naval Integrated Fire Control-Counter Air:NIFC-CA)”アーキテクチャを開発・拡張してきた。米海軍は、「海に群がる米海軍を実現し、近接・遠距離、あらゆる軸、あらゆるドメインから同期した殺傷・非殺傷効果を提供する」ことを意図した「プロジェクト・オーバーマッチ(Project Overmatch)」を通じて、独自の将来のネットワーク・アーキテクチャを模索している。米国米陸軍は、「プロジェクト・コンバージェンス(Project Convergence)」で、より段階的なアプローチをとっている。これは、「継続的かつ構造化された一連の実証(demonstrations)と実験(experiments)を中心に組織された学習の戦役(campaign of learning)」と称している。米陸軍は、情報機関のセンサーを含むさまざまなセンサーをネットワーク化して、精密なキネティックな攻撃、電子攻撃、サイバー攻撃を可能にすることを意図とした「地上層システム(Terrestrial Layer System)」の実験(experimenting)も行っており、“一体型会戦指揮システム(IBCS)”の初期生産も開始している。
各軍省以外では、統合参謀、米国防次官室(研究・工学)(Office of the Under Secretary of Defense for Research and Engineering:OSD/R&E)、特殊作戦コマンド(Special Operations Command:SOCOM)、米防高等研究計画局(Defense Advanced Research Projects Agency:DARPA)それぞれ統合全ドメイン指揮・統制(JADC2)に関連した取組みを行っている。統合参謀は、統合全ドメイン指揮・統制(JADC2)の全体的な戦略を策定し、このテーマに関する統合機能横断的チーム(joint cross-functional team)を率いる任務を負っている。米国防次官室(研究・工学)(OSD/R&E)は、“完全にネットワーク化された指揮・統制・通信(Fully Networked Command, Control, and Communications:FNC3)と呼ばれる研究を行っており、将来の会戦ネットワーク(future battle networks)のための”復元性があり多様性のある通信経路(resilient and diversified communication paths)“を開発することに最初の焦点を当てている。特殊作戦コマンド(SOCOM)は、特殊作戦部隊のためのデータファブリックやデータ管理環境など、部隊間の相互運用性を高めるための複数の取組みを行っている。米防高等研究計画局(DARPA)は、「低コストのセンサー、マルチドメインの指揮・統制ノード、協力的な有人・無人システムからなる急速に構成可能なネットワークを介して、複雑性を強力な新しい非対称武器に変える」ことを狙いとしたモザイク戦(Mosaic Warfare)というコンセプトを開発した。この取組みの一環として、米防高等研究計画局(DARPA)は、人工知能(AI)を使って生のセンサー・データを実用的な情報に変換したり、互換性のない無線機を接続したり、空域の衝突回避(deconfliction)を実行したりする一連のプロジェクトを支援している。
複雑にしている要因:Complicating Factors
多くのプログラムや活動が米国防総省(DoD)全体で同時に進行しているが、意味のある進歩を遂げる上での大きな障害は、統合全ドメイン指揮・統制(JADC2)ミッション・エリア全体を「所有」しているものがないことである。各軍種はそれぞれのプログラム、プラットフォーム、会戦ネットワーク(battle networks)を所有しているが、各軍種のシステムが確実に連携できるように効果的に強制する機能(function)はない。例えば、先進戦闘管理システム(ABMS)において米空軍が開発しているシステムは、数千機の航空機を接続するのには適しているかもしれないが、同じシステムが地上にいる数十万人の兵士(とその装備)を接続するのには適していないかもしれない。また、米陸軍と米海軍がそれぞれ独立した会戦ネットワーク(battle networks)を開発した場合、それらを先進戦闘管理システム(ABMS)に接続することは後回しになってしまうかもしれないし、最悪の場合、予算のない要求になってしまうかもしれない。現在のアプローチのリスクは、各軍種、戦闘軍(COCOM)、機関が独自の方向に進み、複数のストーブ・パイプ化したネットワークを開発することで、より協調的なアプローチが可能となる相互運用性と復元力(resilience)を実現できないことである。
さらに問題を複雑にしているのは、統合全ドメイン指揮・統制(JADC2)をめぐる議論は、ビジョン、開発中の技術、各軍種の計画を実行するプログラムを説明するのに使われる一般的な言葉に隠されていることである。統合全ドメイン指揮・統制(JADC2)の必要性はよく知られているが、具体的なプログラムや活動に関しては、軍の各軍種と議会がお互いに話し合っているように見えることが多々ある。
以下のセクションでは、会戦ネットワーク(battle networks)と、それを構成する様々なペイロード、プラットフォーム、その他の各構成要素(components)について議論するための枠組みを提供する。この枠組みは、様々なコンセプトやプログラムを比較・評価するための共通の語彙を提供することを意図しており、各機能的要素(each functional element)において利用可能な様々なオプションの概要を示している。どのオプションを追求すべきか、具体的な提案はしていない。将来の会戦ネットワーク(battle networks)をどのように構築するか、どのような技術を取り入れるべきか、あるいは取り入れるべきでないかについては、すでに多くの競合するアイデアが存在する。本稿は、競合するアイデアを比較し、役割やミッションをより正確かつ慎重に明確化するための枠組みを提供することで、議論のレベルを上げることを狙いとしている。本シリーズの第2弾では、将来の部隊(future force)のために会戦ネットワーク(battle networks)をデザイン・構築する際に、上級指導者が考慮すべき作戦、戦略・政策、取得アプローチ(acquisition approaches)を探る。
会戦ネットワークの定義:5つの機能的要素:Defining a Battle Network: Five Functional Elements
本稿で提案する枠組みでは、会戦ネットワーク(battle networks)の構成要素を、図1に示す5つの機能的要素(functional elements)に分けている。各機能的要素(each functional element)の中では、人、プロセス、ツール(技術)の組み合わせが、その要素がどのように働きし、会戦ネットワーク(battle networks)全体でどのような能力を提供できるかを規定する。ネットワークの各要素には、複数の種類のプラットフォームとペイロードが含まれ、これらのプラットフォームとペイロードの中には、同時に複数の機能的要素(functional elements)に属するものもある。例えば、E-3 早期警戒管制機(AWACS)は、航空機を探知・追跡するための強力なレーダーと、そのデータをリアル・タイムで処理・分析するために必要なコンピュータ・システムと人員を備えているため、会戦ネットワーク(battle networks)におけるセンサーと処理機能の要素になる。
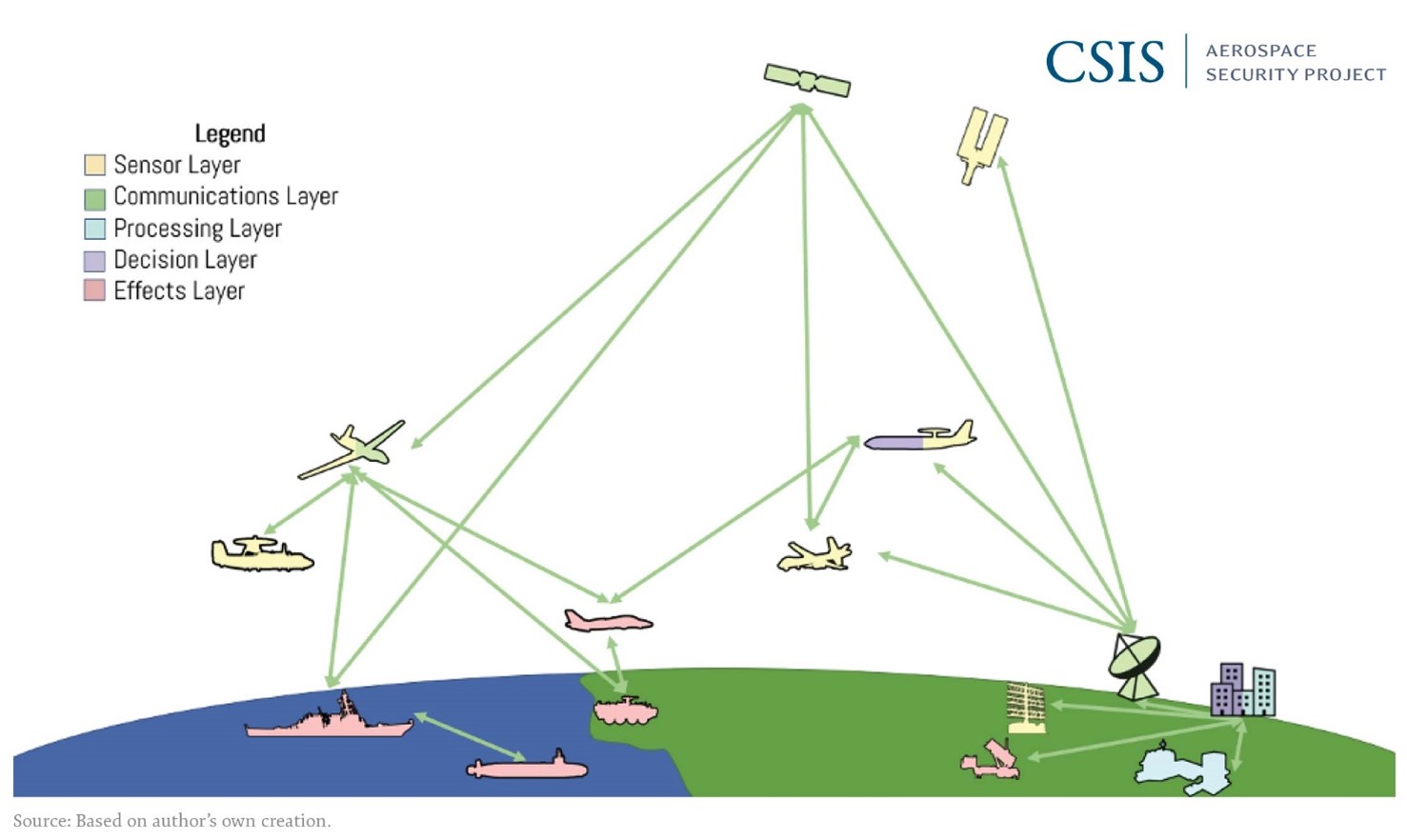
図1: 会戦ネットワーク(Battle Network)の5つの機能的要素の例(図) |
センサー要素:Sensor Element
センサー要素(sensor element)の機能的な目的(functional purpose)は、戦場で起こっていることに関するデータを収集することである。このデータは、部隊(forces)の検出や地理的な位置の特定、誰が何に関与しているかの識別、使用されている活動や部隊(forces)の種類の特徴づけ、戦場を移動する部隊(forces)の追跡などに使用することができる。また、センサー要素(sensor element)は、一般的にバトル・ダメージ・アセスメントと呼ばれる、実行したアクションの効果を評価するためにも使用できる。データを収集する対象には、敵対者の部隊(adversary forces)、友軍部隊(friendly forces)、非戦闘員(non-combatants)などがあるが、センサー要素(sensor element)の最も重要な役割の一つは、これらを区別することである。
運用者は、さまざまなセンサー技術を用いて望むデータ(desired data)を取得することができる。アクティブ・スキャニング・レーダーやソナーなどのアクティブ・センサーは、エネルギー源を放出し、物体から反射して戻ってくるエネルギーを測定することで、物体の位置や大きさ、相対的な動きなどの特徴を把握する。光学カメラや赤外線カメラ、パッシブ・レーダーやソナーなどのパッシブ・センサーは、物体から放出されるエネルギーや自然界から反射されるエネルギーを収集することに依存している。アクティブ・センサーは敵対者に検知される可能性があり、センサーの位置や使用方法を与えてしまうが、パッシブ・センサーは検知される確率が低くても動作する。
センサーは、その能力とユーザーのニーズに応じて、ドメイン内またはクロス・ドメインで使用することができる。表1は、軍用および商用システムを含む、特定のセンサー・プラットフォームの例を示したクロスウォークである。例えば、地上で動いているターゲットを追跡するには、様々な種類のセンサーを使用することができる。地上に設置されたセンサーは、ある程度の動きを検知することができるが、その範囲はセンサーの周囲の比較的狭い範囲に限らる。しかし、天候、航空機の飛行時間、敵対者の防空網、高度に応じたセンサーの最大有効距離などにより、その使用は制限さる。合成開口レーダー(Synthetic aperture radar:SAR)衛星は、航空機のような航続距離、天候、上空飛行、飛行時間の制限を受けることなく、地上の移動目標を検出・追跡することができるが、宇宙からの地域を継続的な覆域(coverage)は、地球低軌道(low Earth orbit:LEO)にある衛星が地表に対して常に動いているため、地球低軌道(LEO)の大規模な衛星群(constellation of satellites)が必要となる。
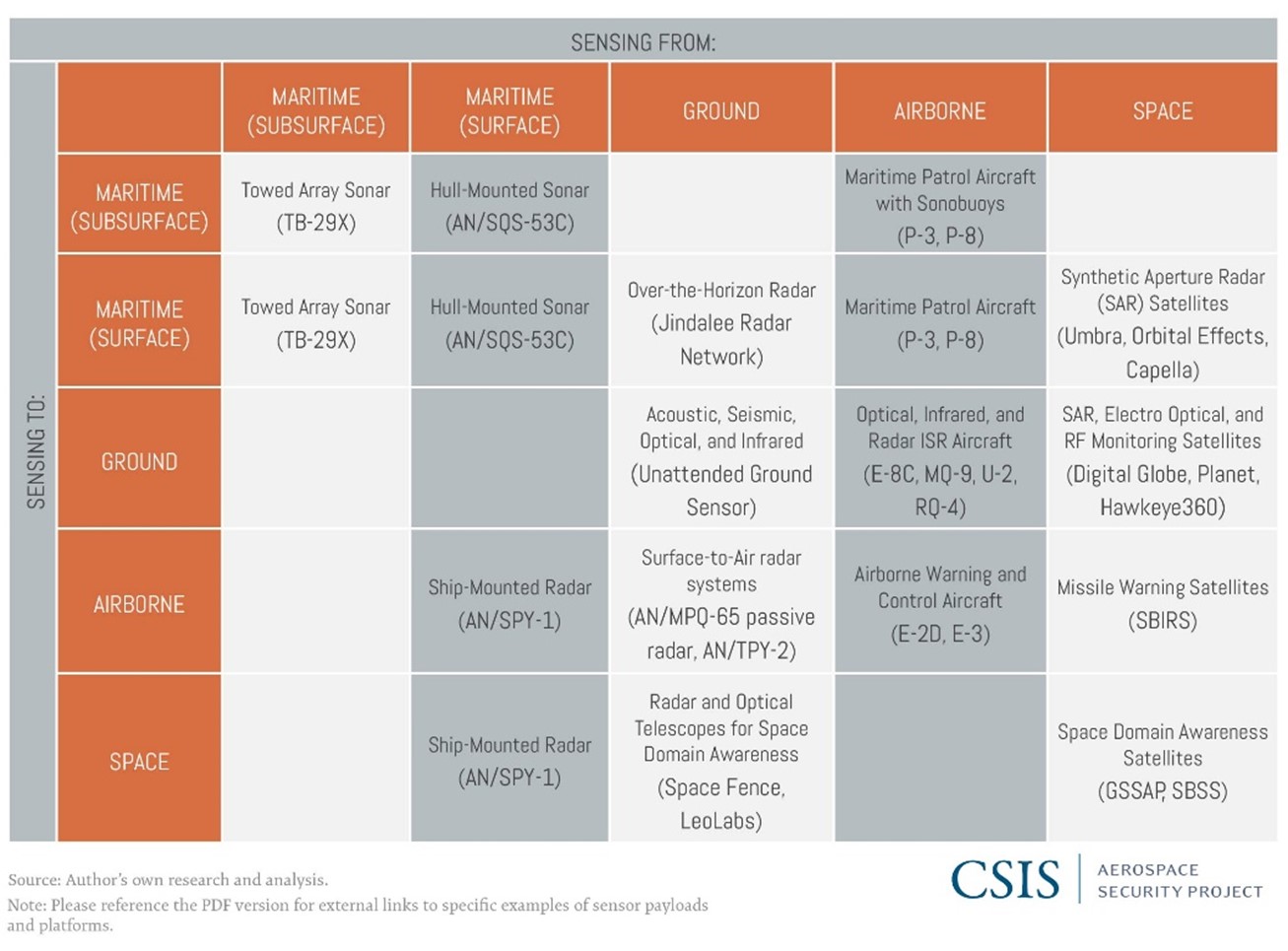
表1: ドメイン内とクロス・ドメインのセンサーの適用例 |
通信要素:Communications Element
会戦ネットワーク(battle networks)の通信要素(communications element)は、システムや運用者間の情報伝達のためのデータ・リンクであるため、最も注目されることが多い。伝送される情報には、音声、映像、一方的なデータ放送、双方向のデータ・リンクなどがある。高精度のセンサーからの生データは、しばしば高いデータ・レートの通信リンクを必要とするが、圧縮されたデータ、処理されたデータ、遠隔測定(telemetry)などは、かなり低いデータ・レートで使用できる。
物理的な通信手段には、有線(銅線またはファイバー)、無線(RF)、または自由空間のレーザー通信(lasercom)がある。有線は陸上ドメイン内の固定されたサイトしか接続できないが、モバイルやクロス・ドメインのデータ・リンクには無線(RF)やレーザー通信(lasercom)が必要である。通信システムでは、幅広い暗号や波形が使用されており、特定のミッション・エリアやシステムに特有のものがある。統合戦術無線システム(Joint Tactical Radio System:JTRS)やソフトウェア通信アーキテクチャ(Software Communications Architecture:SCA)などでは、通信システム間の互換性を確保しようとしたが、その成果は限定的であった。ゲートウェイ(またはテレポート)は、さまざまなプロトコルや標準規格のシステムを接続し、互換性のない無線機間のトランスレーターとして振舞う(act)ことができる。例えば米空軍では、KC-46のような空中給油機が、敵対者の防空圏にある航空機と会戦ネットワーク(battle networks)の他の部分とをつなぐ空飛ぶゲートウェイ(flying gateways)として役に立つことを想定している。
軍は、特定のミッションに使用する最適な通信リンクの種類を選択する際に、レイテンシー、検出・迎撃の確率、妨害電波や‘なりすまし(spoofing)’、天候の乱れに対する復元力(resilience)など、いくつかの要素を考慮する必要がある。レイテンシー(latency)とは、データがシステム間を移動するのにかかる往復時間のことで、防空・ミサイル防衛のための追跡・照準データの受け渡しなど、リアル・タイムのデータが重要なミッションでは、このレイテンシーが要因となることがある。無線(RF)、ファイバー、レーザー通信(lasercom)の各リンクは光速に近い速度で動作するが、長距離では転送時間が加算されていくことになる。例えば、静止軌道(geostationary orbit:GEO)上の衛星から地球までのトランジット・タイム(transit time)は、約0.25秒である。静止軌道(GEO)の衛星間でリンクを閉じるために複数のホップが必要になると、往復の総遅延時間は0.5秒以上になり、音声やビデオ通信などのアプリケーションでは顕著な遅延となる。一方、地球低軌道(LEO)の衛星までの往復時間は、衛星の高度やユーザーの視線にもよるが、0.01秒のオーダーである。
無線(RF)通信リンクは、ユーザー間の直接通信であれ、航空機や衛星通信システムを介した中継通信であれ、検知、傍受、干渉の影響を受けやすい。無線(RF)信号をこれらの脅威から守るために、周波数ホッピングのスペクトラム拡散波形、アンテナヌル化、適応型フィルタリング、高利得/狭ビーム幅アンテナなど、さまざまな方法がある。また、無線(RF)信号は、他の軍事・民間信号との干渉を避けるために、その使用に割り当てられた周波数の範囲によって帯域が制限されている。使用する周波数帯によっては、大気の減衰、気象条件、太陽フレア、その他の自然現象による干渉が通信を低下させる。光ファイバーケーブルなどの有線通信システムは、必要に応じて同じ経路に多くの回線を通すことができるため、無線(RF)信号のような帯域幅の制限はないが、有線通信は、ケーブル経路上での物理的な改ざんや、ネットワーク内のルーターや端末をターゲットとしたサイバー攻撃によって、検知、傍受、干渉される可能性がある。
レーザー通信(lasercom)システムは、無線(RF)通信や有線通信の多くの制限を克服することができる。レーザー通信(lasercom)のリンクは、レーザーのビーム幅が非常に狭く、受信機の視野が狭いため、本質的に検出、傍受、干渉から保護されている。このため、敵対者が物理的にビーム内に位置しない限り、伝送の検出、傍受、妨害などができないようになっている。しかし、レーザー通信(lasercom)リンクのビーム幅は非常に狭いため、ブロードキャスト通信には適していない。また、無線(RF)リンクが広い範囲で多くのユーザーに同時に送信できるのに対し、レーザー通信(lasercom)リンクは高データ・レートの専用リンクを必要とするポイントツーポイント通信に最適である。大気中を通過するレーザー通信(lasercom)リンク(宇宙間のレーザー通信(lasercom)リンクとは異なる)は、大気の歪みや天候の乱れの影響を受けるが、宇宙と航空機の間のレーザー通信(lasercom)リンクは、航空機の高度に応じて大気の多くを避けることができる。
2003年に始まった米空軍の「変革をもたらす衛星通信(Transformational Satellite Communications:TSAT)プログラムでは、宇宙用レーザー通信(lasercom)が重要な役割を果たしていたが、2009年には1機も衛星を運用することなくプログラムが中止された。しかし、その後の10年間、政府のプログラムの内外で宇宙用レーザー通信(lasercom)の開発が進み、General Atomics社とTesat-Spacecom社による空中用レーザー通信(lasercom)通信システムの2020年実証(2020 demonstration)が行われた。この実証(demonstrations)では、MQ-9 Reaperと静止軌道上の衛星をレーザー通信(lasercom)リンクで接続した。スペースX社の最新型通信衛星「スターリンク」には、衛星間で直接データをやり取りするためのレーザー通信(lasercom)クロスリンクが搭載されている。また、宇宙開発事業団(SDA)は、レーザー通信(lasercom)を用いた高データ・レートリンクを計画している地球低軌道(LEO)の衛星群(constellation of satellites)の開発に着手し、図2に示すような赤外線とレーザー通信(lasercom)のペイロードを搭載した一対の衛星を出資して技術を実証した。米防高等研究計画局(DARPA)の「ブラックジャック」プログラムでは、「マンドレイク2」ミッションでのレーザー通信(lasercom)の実証に別途資金を提供した。両組の衛星は、2021年6月30日にライドシェアミッションの一部として一緒に打ち上げられ、この記事を書いている時点では、初期テストと評価が行われている。
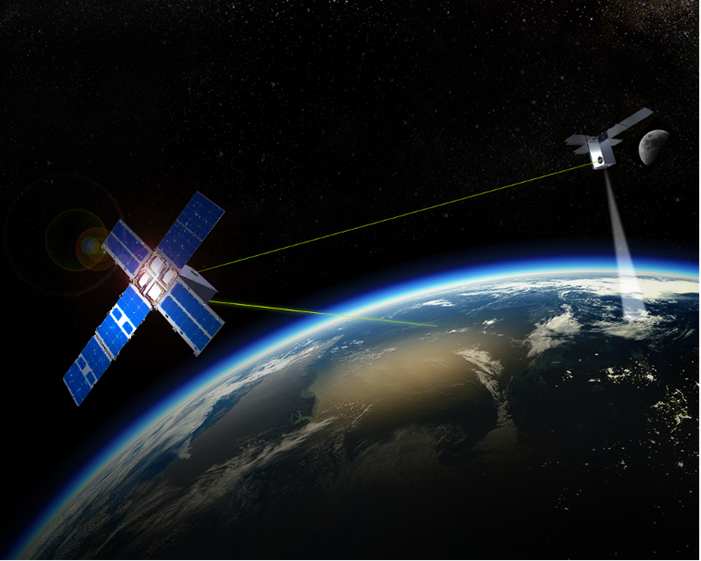
図2:General Atomics社と宇宙開発庁(Space Development Agencyz)のレーザー通信(Lasercom)の実証ミッションの図 (Source: General Atomics Electromagnetic Systems.) |
処理要素:Processing Element
会戦ネットワーク(battle networks)の機能的要素(functional elements)の中で、最も見落とされているが、決定的に重要なものの一つが処理要素(processing element)である。処理要素(processing element)は、様々なセンサー・ソースからのデータを分析、集約、合成し、決心(decisions)に情報を提供することに役立てる。例えば、SARシステムからの生データを処理してレーダー画像を作成し、戦場で関心のある物体や動きを識別する必要がある。また、送信前にデータを圧縮したり、意思決定者(decisionmakers)が関心を持つ可能性のあるデータをフィルタリングしたりフラグを立てたり、特定の情報製品を作成するためにも処理が必要である。例えば、衛星画像を解析して、駐車場に停まっている車の数や、ある地域に停まっている船の数を数えるアルゴリズムを開発した企業もある。重要なのは、処理要素(processing element)の出力が、画像や定性的な評価ではなく、(統計的な信頼性パラメータを持つ)数字の集合である場合があることである。
処理要素(processing element)における重要な差別化要因は、処理が行われる場所が、センサーに搭載されているか、クラウドにあるか、あるいは戦術的なエッジにあるかということである。一部のセンサーを搭載するプラットフォームは、センサーが生成するデータを送信する前に処理するために必要な計算可能な構成要素(computational components)を搭載するのに十分なサイズ、重量、パワー(SWAP)を備えている場合がある。例えば、イメージャーにはデータを圧縮する処理能力があり(通信量を大幅に削減)、レーダーには生成された生データからフィルタリングや初期生成物を計算するプロセッサが搭載されている場合がある。オンボードでの処理は、解析速度の向上、センサーのキューイングやトラッキング機能(tracking functions)の自動化、通信量の削減など多くのメリットがある。しかし、プラットフォームによっては、特に小型の航空機や衛星では、サイズ、重量、パワー(SWAP)に大きな制限があり、センシングプラットフォームとは別に処理を行う方が運用上も経済的にも有利な場合がある。
クラウド・ベースの処理は、多くのプラットフォームのようにサイズ、重量、パワー(SWAP)の制限を受けることなく、本質的に無制限の処理能力とデータ・ストレージ容量が得られるという利点がある。センサーは、生の情報や部分的に処理された情報を地上のデータ・センターに送信し、最終的な処理や分析を行うことができる。過去20年の間に、民間企業は世界中に巨大なデータ・センターを建設し、米軍(U.S. military)や情報機関が所有・運営しているデータ・センターの範囲をはるかに超える処理能力、記憶容量、(場合によっては)信頼性を備えている。2018年12月に発表された米国防総省(DoD)のCloud Strategyでは、ミッション成功の重要な差別化要因としてクラウド・コンピューティングの重要性が指摘されている。しかし、JEDI(Joint Enterprise Defense Infrastructure)と呼ばれる米国防総省(DoD)向けの共通のクラウド・コンピューティング環境を構築するための主契約は、何年にもわたって法的紛争に巻き込まれ、最終的にキャンセルされた。
軍事ミッションの中には、クラウド・コンピューティング・センターとの間の通信リンクでは対応できない高周波数または低遅延の処理データを必要とするものがある。さらに、紛争中の通信環境では、特にエッジや紛争中の戦場で作戦する部隊にとっては、これらの長距離データ・リンクが劣化したり中断したりする可能性がある。このような部隊は、センサーからシューターへのキル・チェーン(kill chain)を迅速かつ確実に閉じるために、十分な処理能力を備えた、現地の他のプラットフォームに直接リンクするセンサーを必要とするだろう。空中センサーや衛星センサーは、他のデータ・リンクに頼ることなく、その場でデータを処理する地上のユーザー端末にデータを直接ダウンリンクすることができる。U-2に搭載されているオープン・ミッション・システム・コンピュータや、新型F-15EXに搭載されているアドバンスド・ディスプレイ・コア・プロセッサ(ADCP)IIなどのシステムを利用して、競合する空域にいるステルス機は、センサー・データを脅威の領域(threat area)のすぐ外側で作戦している非ステルス機に中継して、処理と普及を行うことができる。また、空中給油機は、その大きさと発電能力から、戦術的エッジでの通信ゲートウェイとデータ処理・配信センターを兼ねることができる。
決心要素:Decision Element
決心要素(decision element)は、情報を行動に移す場所であるため、おそらく会戦ネットワーク(battle networks)の中で最も重要な部分である。決心(decision)をどこで行うか、どのように行うか、誰が関与するかは、どのような種類の行動を検討しているかによって異なる。当面の間、致死性の戦力の行使などの重要な決心(decisions)には、何らかのレベルでヒューマン・イン・ザ・ループ(human-in-the-loop)が関与する可能性が高く、歴史的に見ても会戦ネットワーク(battle networks)におけるほとんどの決心(decisions)にはこれが規定値となっている。しかし、ヒューマン・イン・ザ・ループ(Human-in-the-Loop)の意思決定(decisionmaking)には、コンピュータや人工知能と機械学習(AI/ML)を活用して、決心(decisions)に必要な情報を提供したり、プロセスのスピードを上げたりすることができる。
目視範囲を超える交戦(engagements)では、実質的にコンピュータによる意思決定(decisionmaking)が行われている。人間の目はおよそ2マイル以下の距離の物体しか検知できず、それ以上の距離では何らかの電子センサーに頼らなければならない。例えば、競合する空域にいる戦闘機は、可能な限り最大の距離、つまり2マイルを超えたところにいる敵対者の航空機と交戦しようとする。戦闘機のレーダーは、その地域にいる他の航空機を検出し、その信号をデータベースに登録されている他の航空機と比較して、関係する航空機の種類と、それが友軍(friend)か、敵(foe)か、あるいは非戦闘員(non-combatant)かを判断する。この情報は戦闘機のコックピットディスプレイに表示され、他のセンサーからのデータと照合することで、結果に対する運用者の信頼性を高めることができる。しかし最終的には、パイロットは直接確認することなく、コンピュータ・システムが提供する推奨事項のみに基づいて武器の発射を決定することができる。
人工知能・機械学習(AI/ML)システムは、さらに一歩進んで意思決定(decisionmaking)を支援し、必ずしもヒューマン・イン・ザ・ループ(Human-in-the-Loop)の必要のない決心(decisions)を自動化する。人工知能・機械学習(AI/ML)システムは、決心要素(decision element)において、データを迅速に分析し、注目すべき情報やパターンを見つけ出すことができ、さらに多くの情報を収集することで、データの分析や解釈の方法をダイナミックに進化させることができる。上記の戦闘機(fighter)の例では、レーダー・データ上で動作する人工知能・機械学習(AI/ML)アルゴリズムが、データベースに登録されていない新たなシグネチャやパターンを検出し、例えば、これまで見られなかった電子的対抗手段を使用している航空機などを検出し、飛行中にこの新しい情報に基づいてアルゴリズムを更新することができる。人工知能・機械学習(AI/ML)システムの利点は、人間が見逃してしまうようなデータのつながりを形成したり、大量のデータを人間が同じ作業をするのに比べてわずかな時間で分析できることである。例えば、センサーの方向を変えて何かを探すとか、妨害電波が発生しているときに帯域を再配分するなど、比較的穏やかな決心(decisions)であれば、人間が入力しなくても人工知能・機械学習(AI/ML)システムが意思決定を下す(make decisions)ことができる。これにより、人間の作業を軽減し、人間が最も必要とされるプロセスや決心(decisions)に精神的なエネルギーを集中させることができる。
多くの軍事ミッションでは、会戦ネットワーク(battle networks)の中で最も時間がかかるのが決心要素(decision element)であり、アプリケーションによっては、効果的な活動を行うために必要な迅速な応答時間のために、ヒューマン・イン・ザ・ループ(human-in-the-loop)ができない場合がある。これは、図3に示したCWIS(Close-In Weapons System)のように、多くの近接防空・防弾システムであるでに見られる現象である。このことは、将来の会戦ネットワーク(future battle networks)における人工知能・機械学習(AI/ML)システムの役割や、政策立案者が状況に応じて許容できる自動化のレベルについて、いくつかの重要な政策課題を提起している。人工知能・機械学習(AI/ML)システムおよび人間が下す決心(decisions)の質と信頼性は、追加のセンサーへの接続性とデータ処理能力を向上させることで改善できる。このような接続性の向上は、将来の会戦ネットワーク(future battle networks)において、より多くの決心(decisions)やより高いレベルの決心(decisions)を自動化することに有利に働く可能性がある。意思決定(decisionmaking)に人工知能・機械学習(AI/ML)システムを使用することの戦略的・政策的意味については、本連載の第2回目の論稿で詳しく説明している。

図3: 2019年7月10日にCIWS (Close-in weapon system)を発射する米海軍のミサイル巡洋艦ヴェラ・ガルフ(CG-72) Source: U.S. Navy photo by Mass Communication Specialist/Petty Officer 3rd Class Gian Prabhudas via Defense Visual Information Distribution Service. |
効果要素:Effects Element
会戦ネットワーク(battle networks)の最後の要素である第5の要素は、情報を戦場での効果に変えるところである。これらの効果には、敵対者の部隊(adversary forces)に物理的なダメージを与えたり破壊したりするキネティックな火力と、電子戦(electronic warfare)や指向性エネルギー兵器、サイバー攻撃などのノン・キネティックな火力がある。合同作戦で重要なのは、これらの効果を時間的にも場所的にも各ドメインを超えて調整し、友軍や非戦闘員へのリスクを最小限に抑えながら敵対者に望ましい効果を与えることである。この調整を行うのが会戦ネットワーク(battle networks)である。あるドメインの部隊が別のドメインの部隊に攻撃を仕掛けるクロス・ドメイン効果は、非対称的な優位性を活用し、敵対者のバランスを崩すために特に有効な手段である。1991年の第一次湾岸戦争の初期に行われた航空作戦は、米軍(U.S. military)が空と宇宙での優位性を利用して、地上で地上軍だけよりも大きな効果を上げた典型的な例である。
交戦(engagement)で効果を生み出すための最適な方法を選択する際には、ターゲットの範囲や数、脅威の環境、巻き添え被害の可能性、攻撃後のダメージ評価の必要性、公共の可視性や可逆性、帰属の問題など、いくつかの要素を考慮する必要がある。統合直接攻撃弾(Joint Direct Attack Munition:JDAM)のような短距離のキネティックな兵器は、低コストで大量の射撃が必要な場合や、ターゲットの機動性が高い場合に最適である。長距離対地巡航ミサイル(LRASM)や統合空対地スタンドオフ・ミサイル(JASSM)などの長距離・スタンドオフ型のキネティックな兵器は、少数の高価値ターゲットや、すべての運搬プラットフォームが敵対者の防御を突破できないような、より争いの多い環境に適している。精密誘導兵器は、特に密集した都市部のターゲットに対して、必要な兵器や運搬プラットフォームの数を減らし、巻き添え被害のリスクを減らすために使用さる。キネティックな兵器は一般的に目に見える永続的な効果をもたらすため、会戦ネットワーク(battle networks)のセンサー要素(sensor element)を使って戦闘のダメージを評価することができる。
サイバー攻撃、指向性エネルギー兵器、電子戦(electronic warfare)などのノン・キネティックな攻撃方法は、キネティックな兵器と同じような効果を異なる手段で実現することができる。例えば、脅威となるドローンや小型船を銃やミサイルで攻撃するのではなく、図4のシステムのように高出力のレーザーで狙うことも可能である。ジャミングなどのノン・キネティックな攻撃は、その効果が可逆的で、必要な時に必要な場所で一時的な効果を得ることができる。ノン・キネティックな攻撃の中には、第三者が攻撃の発生を確認できないものや、攻撃を受けた側が誰が攻撃しているのかすぐにはわからないものもある。このような理由から、ノン・キネティックな攻撃は状況によってはエスカレートしにくいと考えられることもあるが、これについてはまだ議論の余地がある。ノン・キネティックな攻撃が効果的であるかどうかを判断するのは、特にその効果が公には見えない場合には難しいことがある。また、ゼロデイ脆弱性を利用したサイバー攻撃のように、攻撃方法によっては、敵対者がそれに対する防御策を開発するまでの間、有効な期間が限られている場合がある。このような理由から、運用者は、キネティックな効果で同じ結果が得られる場合、検証できないノン・キネティックな効果に頼ることに抵抗を感じることがある。

図4: 2014年11月17日に、アメリカ海軍のトレントン級ドック型輸送揚陸艦ポンセで試験中のレーザー兵器システム(LaWS) Source: U.S. Navy photo by John F. Williams via Defense Visual Information Distribution Service. |
会戦ネットワーク(battle networks)の効果要素(effects element)を構築・統合する際に重要なのは、進化する戦場で武器とターゲットをマッチングさせるというダイナミックなプロセスである。そのためには、センサー要素(sensor element)、決心要素(decision element)、効果要素(effects element)の各要素を密接に一体化し、求める効果の種類と利用可能な伝達方法に基づいてターゲットを選択し、優先順位をつける方法を最適化する必要がある。将来の会戦ネットワーク(battle networks)では、このプロセスは現在よりもはるかに高速でダイナミックなものになる可能性があり、あらゆるドメインの乗員や遠隔地の乗員を持つシステムの群れによって、ターゲットが次々と特定され、攻撃さる。また、UberやLyftなどのライド・シェア・サービス(ride-sharing service)のように、ライダーとドライバーの相対的な位置関係、予測される経路、利用可能な人数や座席数などに基づいて、ライダーとドライバーを継続的にマッチングさせることも可能になると考えらる。しかし、このように高度に最適化され、迅速に適応する効果要素(effects element)のビジョンは、“復元力があり、相互運用可能な会戦ネットワーク(resilient and interoperable battle networks)”なしには実現できない。
最終的な考え:Final Thoughts
上記のセクションでは、会戦ネットワーク(battle networks)を構成する5つの機能的要素(functional elements)と、それらを構成する様々なペイロード、プラットフォーム、その他の各構成要素(components)を定義するための枠組みを提供している。センサー要素(sensor element)は、戦場で起きていることに関するデータを収集し、それを処理要素(processing element)に渡す。決心要素(decision element)は、データ製品を使用して決心(decisions)に情報を提供し、会戦ネットワーク(battle networks)の効果要素(effects element)で情報を行動に移す。そして、通信要素(communications element)は、他のすべての要素がデータと決心(decisions)を戦場で自由にやり取りできるようにする。
この枠組みから得られる最も重要な洞察は、将来の会戦ネットワーク(battle networks)は1つのネットワークではなく、ネットワークのネットワークであるということである。将来の会戦ネットワーク(battle networks)は、従来のハブ&スポーク型のネットワーク・アーキテクチャではなく、脅威や混乱に適応できる動的に再構成可能なメッシュ・ネットワークであるべきである。このようなネットワークは、必要に応じて戦術的なサブネットワークに分割し、予測不可能な方法で異なるシステムや代替経路にデータを再ルーティングし、機会があればより大きなネットワークに再接続することができる。このような高いレベルの相互運用性と復元力(resilience)を実現するためには、通信要素(communications element)が不可欠であるが、会戦ネットワーク(battle networks)の他の要素も、互換性のあるデータ標準とプロトコルを使用して、複数のセキュリティ・レベルでシームレスにデータを渡すように適応させる必要がある。
また、将来の会戦ネットワーク(battle networks of the future)は、新しい規格に基づいて構築された新しいシステムだけで構成されるわけではない。新しいシステムや新しい規格は新しい能力を実現するための重要な要素であるが、将来の会戦ネットワーク(future battle networks)を構成するプラットフォーム、センサー、無線機、その他のペイロードの大部分はすでに使用されており、これらの既存システムは今後何十年にもわたって部隊(force)の重要な一部であり続けることになる。既存のシステムは、将来のシステムと同じネットワークに一体化されなければ、統合全ドメイン作戦(Joint All-Domain Operations:JADO)の可能性を最大限に発揮することはできない。さらに、米国防総省(DoD)は、各機能的要素(functional elements)のそれぞれ全体に、米国政府、民間企業、同盟国、パートナー企業のさまざまなシステムをすでに所有しているか、それにアクセスすることができる。将来の会戦ネットワーク(battle networks)を構築するには、既存のシステムを統合して相互に接続し、新たな方法で新たなミッションを実行することと、まったく新しいシステムや能力を実戦投入することが重要である。軍が「統合用兵コンセプト(Joint Warfighting Concept)」で掲げたビジョンを追求するにあたり、政策立案者には運用、戦略、取得(acquisition)に関するいくつかの問題が発生する。本シリーズの第2回目は、これらの問題と、政策立案者が今後の方向性を決める際に考慮すべき重要な要素について述べる。
著者
トッド・ハリソン(Todd Harrison)は、ワシントンD.C.にある戦略国際問題研究所(Center for Strategic and International Studies)の国防予算分析部門のディレクターであり、航空宇宙安全保障プロジェクトのディレクターでもある。